各種モーションを堪能 ー二足歩行ロボットへの道2ー
本記事にはアフィリエイト広告が含まれます。
前回は書籍を参考に二足歩行ロボットを製作いたしました。
ここでは各種モーションを試しましたので報告させていただきます。
目次
歩行
書籍の歩行モーション(mr5-7)を試しました。
これもサンプルの歩行動作
すごいなぁ
こんなの自分でできる気がしない pic.twitter.com/1iblVYWXX5— HomeMadeGarbage (@H0meMadeGarbage) June 18, 2021
非常にスムーズに歩くので驚きました!
ロボットのボディはPCB基板で制作されることが想定され厚さ1.6mmとなっているのですが、
3Dプリントで厚さ1.6mmですと、横すねパーツが強度弱いので3mm厚さに修正しました。
いい感じ♪
この投稿をInstagramで見る
BLE遠隔操作
スマホアプリBlynk を用いてBLEで操作を操作できるようにしました。
制御にM5StickC Plusを用いておりますので無線通信は容易に可能です。
動作は書籍で紹介されている前進、後退、左右旋回、左右横歩きを追加しました。
遠隔で操作
各モーションは調整しなくてはならない
特に旋回#とってもロボットくん @blynk_app #M5Stack #BLE予算1万円でつくる二足歩行ロボット (I/O BOOKS) を Amazon でチェック! https://t.co/JZIpfg4CRO pic.twitter.com/eoDJoWTcsH
— HomeMadeGarbage (@H0meMadeGarbage) June 19, 2021
各種モーション(特に旋回)は調整が必要そうですが、遠隔での操作が可能となしました。
Blynk接続で開眼するようにしました。実に可愛いですね。
BLE接続で開眼#とってもロボットくん @blynk_app
#M5Stack #BLE pic.twitter.com/RPW9Cho9tH— HomeMadeGarbage (@H0meMadeGarbage) June 20, 2021
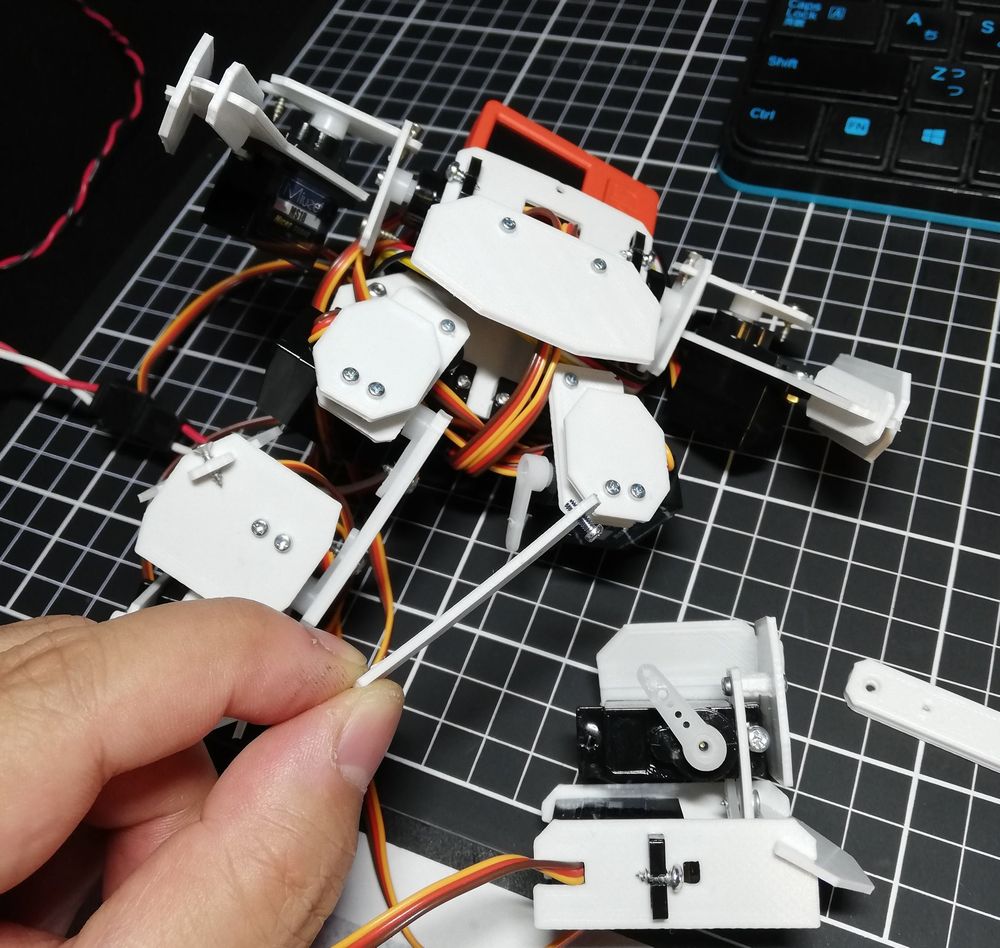
起き上がり
書籍の著者様のサイトに起き上がり用のコードが載っていましたので試してみました。
サイトの指示に従い以下修正加えました。
- 左右のHip (ロール) サーボホーンを前側にひと歯ずらし、
オフセットで直立するように調整
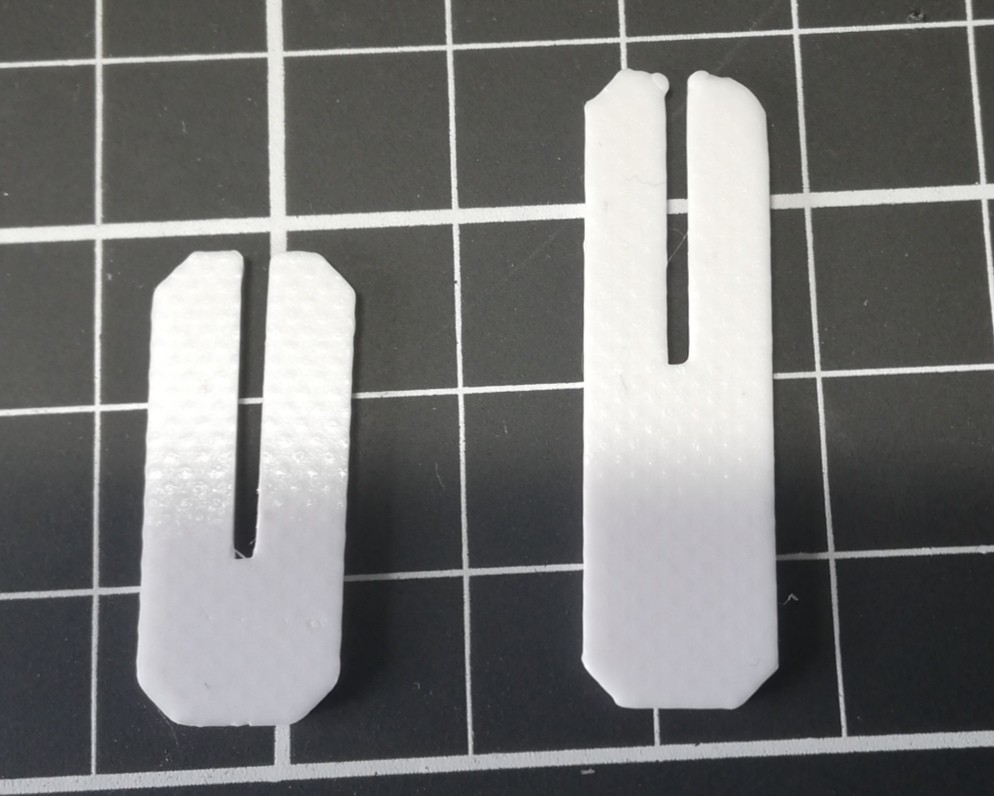
- 手先を延長

この投稿をInstagramで見る
頭が重くうまく立てません。。。
コチラも調整が必要のようです。
おわりに
ここでは書籍で詳細されている各種動作を試しました。
実機に合わせて調整が必要のようなので次の道では、より二足歩行ロボットの理解を深め
モーション調整に加えて、更にはオリジナルの動作を製作できるよう学習進めます。
それでは次の道でお会いしましょう!