二足歩行ロボットへの道 爆誕 ー二足歩行ロボットへの道1ー
本記事にはアフィリエイト広告が含まれます。
前々から二足歩行ロボットを作りたいと思っていたのですが、
何から手をつけてよいか分からず
低価格で販売されたロボットを買うチャンスも逃し
途方に暮れていました。。
現状の私のスキルは…
予算尽きて足しかできなかった。。。#ロボット製作 #Blynk pic.twitter.com/rC60Zww9sC
— HomeMadeGarbage (@H0meMadeGarbage) May 23, 2019
足をひとつ作るのが精いっぱいの状況です。
目次
予算1万円でつくる二足歩行ロボット
そんな中、非常に良い本を手に入れました。
こちらには12個のマイクロサーボを用いて、いちからロボットを製作する方法が記載されています。
制御マイコンや部品を実装するPCB基板を設計・製作するところから始り、ロボットのボディもPCB基板で構築するというストロングスタイルぶりです。
非常に興味深い内容なのですが、あまりにもストロングなので書籍購入から何もせずに1年も経ってしまいました。。。
もっと手軽に
二足歩行ロボットの学習の第一歩をきるために、PCB設計から始めるのは私にとってあまりにも腰が重いので
もっと簡単な方法を模索しました。
コントローラ、ドライバ
コントローラにはM5StickC Plusを採用することにしました。
M5StickC Plusには無線機能とディスプレイ (135x 240ピクセル)とIMUセンサも内蔵されていますので非常に便利です。
12個のサーボを制御するためにI2C信号でサーボを16個まで制御できる モータドライバ PCA9685 を搭載した以下のモジュールを用いました。
あら すごく いいですねぇ
Miuzei サーボモーター 10個セットデを Amazon でチェック! https://t.co/wMOV3tVRAf pic.twitter.com/smqPCRGh63
— HomeMadeGarbage (@H0meMadeGarbage) June 17, 2021
サーボは以下の低価格のものを12個使用しました。
ボディ
ここではPCB基板ではなく3Dプリンタで出力しました。
書籍のサンプルコードダウンロードでFusion360用のモデルデータも入手することができ、
同じサイズのものを出力することができました。
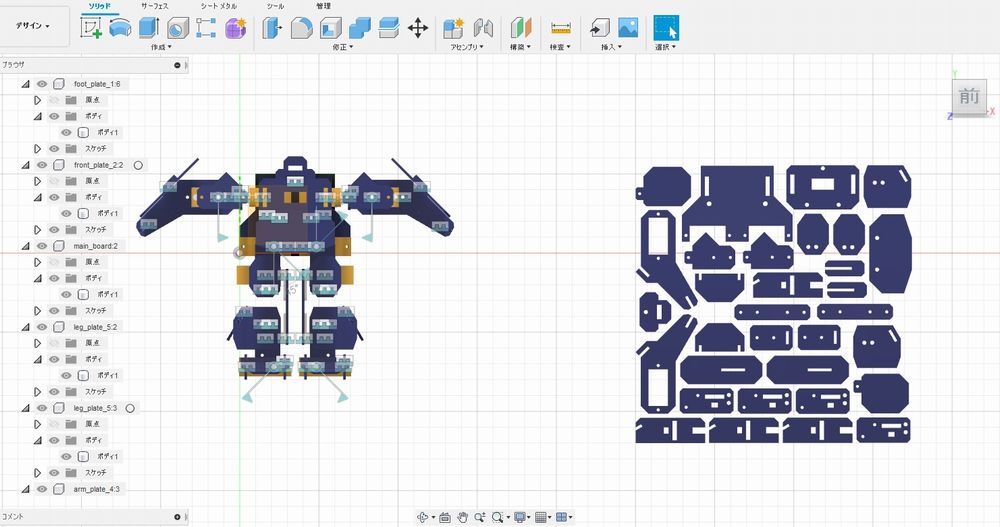
↓3Dプリンタで出力した様子

組み立て
書籍に従って組み立ててみました。
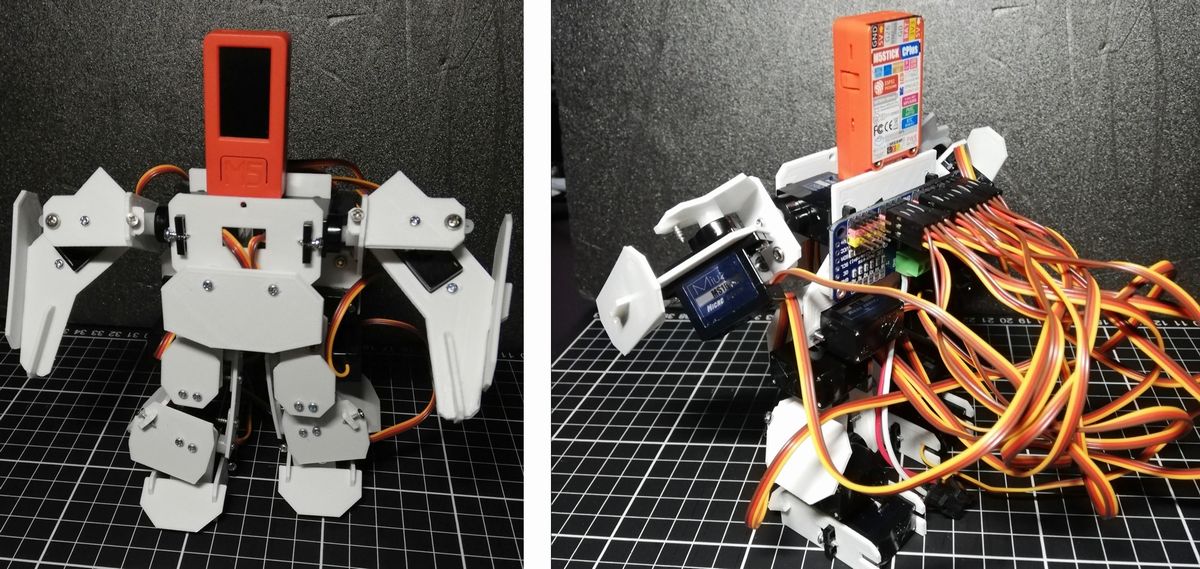
いい感じ♪
ディスプレイに顔を表示してちょっと腕を動かしてみました。
【ロボットくん完成】
皆さんこんにちは!
ロボットくんです。これからマスターと共に様々な動作を学びたい所存です。
宜しくネ#とってもロボットくん
予算1万円でつくる二足歩行ロボット (I/O BOOKS) を Amazon でチェック! https://t.co/JZIpfg4CRO pic.twitter.com/WBdlh3TWWX
— HomeMadeGarbage (@H0meMadeGarbage) June 18, 2021
ロボットくんの完成です!!
M5StickC Plusのディスプレイへのビットマップ画像表示には
以下のバイナリデータ生成ウェブページを使用しました。
http://javl.github.io/image2cpp/
ドローモードはM5StickC のディスプレイに従って以下のように設定しました。
![]()
おわりに
ついに二足歩行ロボットが手に入りました。
二足歩行ロボットへの道 爆誕です!
次からは書籍に従ってモーションプログラミングの学習に入ります!!
それでは次の道でお会いしましょう。