モーションコントローラ検討2 ー二足歩行ロボットへの道5ー
本記事にはアフィリエイト広告が含まれます。
前回はオリジナルのコントローラを製作してESP-Nowでのロボット上半身同期制御の実現を確認しました。
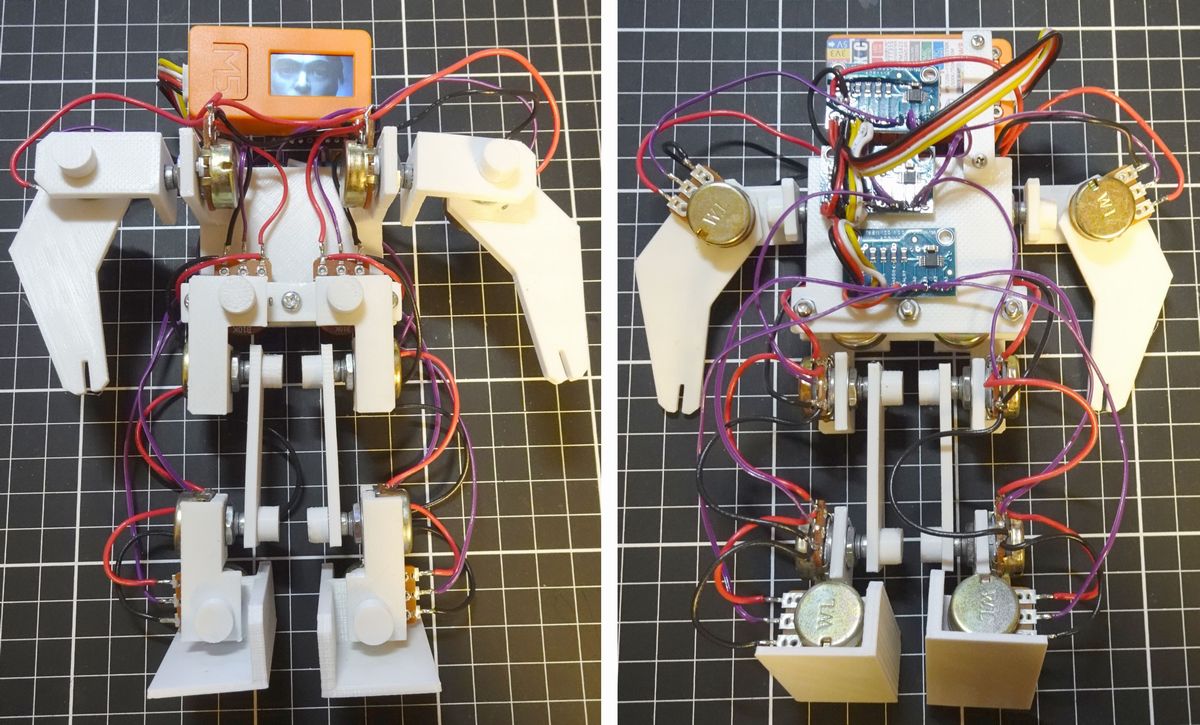
今回は下半身も追加して全身制御を目指します。

目次
コントローラ 下半身 配線
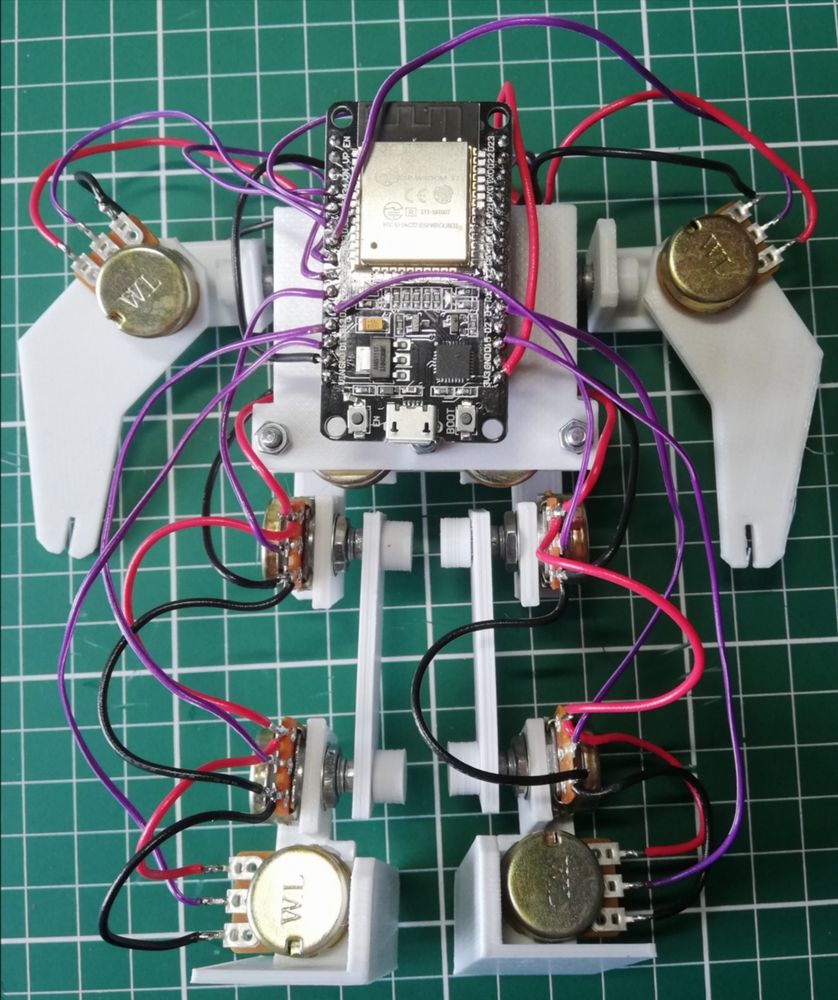
問題発生
配線が終わったので、前回同様にESP-Nowで二足歩行ロボットと通信しようと思たのですが。。。
ESP32はWiFi使用しながらACD2ピン(IO2, IO4, IO12~15, IO25~27)が使えないことを忘れておりました。
WiFiを使うとなるとESP32のADC1ピンの4個もしくは6個のピンしか使えないですよね。。
UDP通信
仕方ないのでESP-Nowの使用はあきらめてコントローラをUSBケーブルでPCに接続しシリアルでデータ送信して、
UDPで二足歩行ロボットに送信して動かしてみました。
全身コントローラでけた。
でもね
難しい。。。#とってもロボットくん pic.twitter.com/RYd5uULBVa
— HomeMadeGarbage (@H0meMadeGarbage) July 11, 2021
歩行動作にも挑戦しましたが、UDPですと高速送信できないのでなかなか厳しいです。
ESP-Now
どうしてもESP-Nowを使用して高速通信がしたいのでコントローラにADCモジュールの使用を検討しました。
以下のI2Cでデータ取得できる4入力のACDモジュールを使ってみました。
ちょうどAmazonで3個セットが販売されていました。
ADCモジュールの使用により多くのIOピンは必要なくなったので、マイコンにはM5StickCを採用し4ピンコネクタでモジュールと接続しました。

ADCモジュール3つはADDRピンの接続をそれぞれ変えて (GND, SDA, VDD)、I2Cアドレスを変えて使用しました (0x48, 0x4A, 0x49)。
M5StickCを採用したことで内蔵バッテリが使えるのでコントローラが完全無線になりました。
動作
ADCモジュール(ADS1115)のライブラリとして以下を使用しました。
https://github.com/adafruit/Adafruit_ADS1X15
ESP-Nowでコントローラから二足歩行ロボットに角度データを送信します。
UDPの時より早い通信が実現でき制御もスムーズになりました。
歩行動作
スムーズな通信が可能になったため歩行動作もなんとかできました。
起き上がり
腕を1cmほど伸ばしています。
おわりに
ここではオリジナルのコントローラを製作してESP-Nowでの同期制御で全身動作を確認できました。
次回は動作の記録や調整、そして再生を目指したいと思います。
それでは次の道でお会いしましょう!