ANYCUBIC
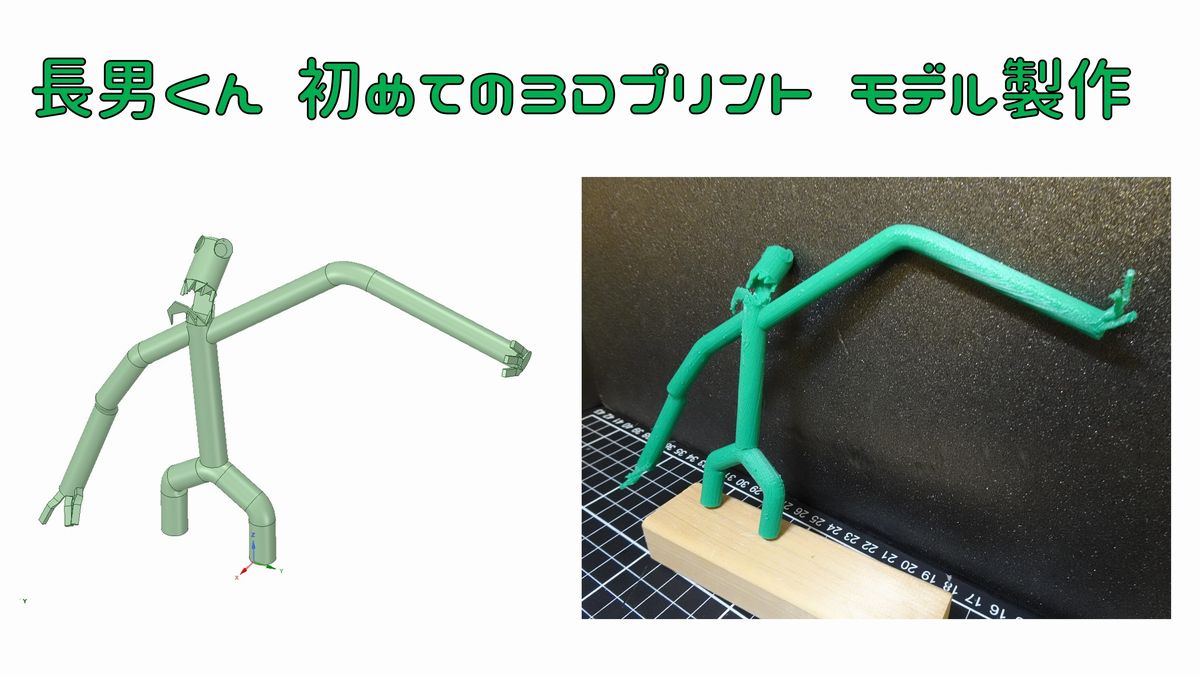
長男くん 初めての3Dプリント モデル製作
HomeMadeGarbage Advent Calendar 2022 |10日目 長男くんがはじめて3Dモデルの作製に挑戦しました。 製作したモデルを3Dプリントもして楽しみました♪ 本文は長男くん監修の元 お父ちゃんが書いています。 モデル製作 ...
Advent Calendar / 工作・ハンドメイド 2022.12.10 長男くん ![]()
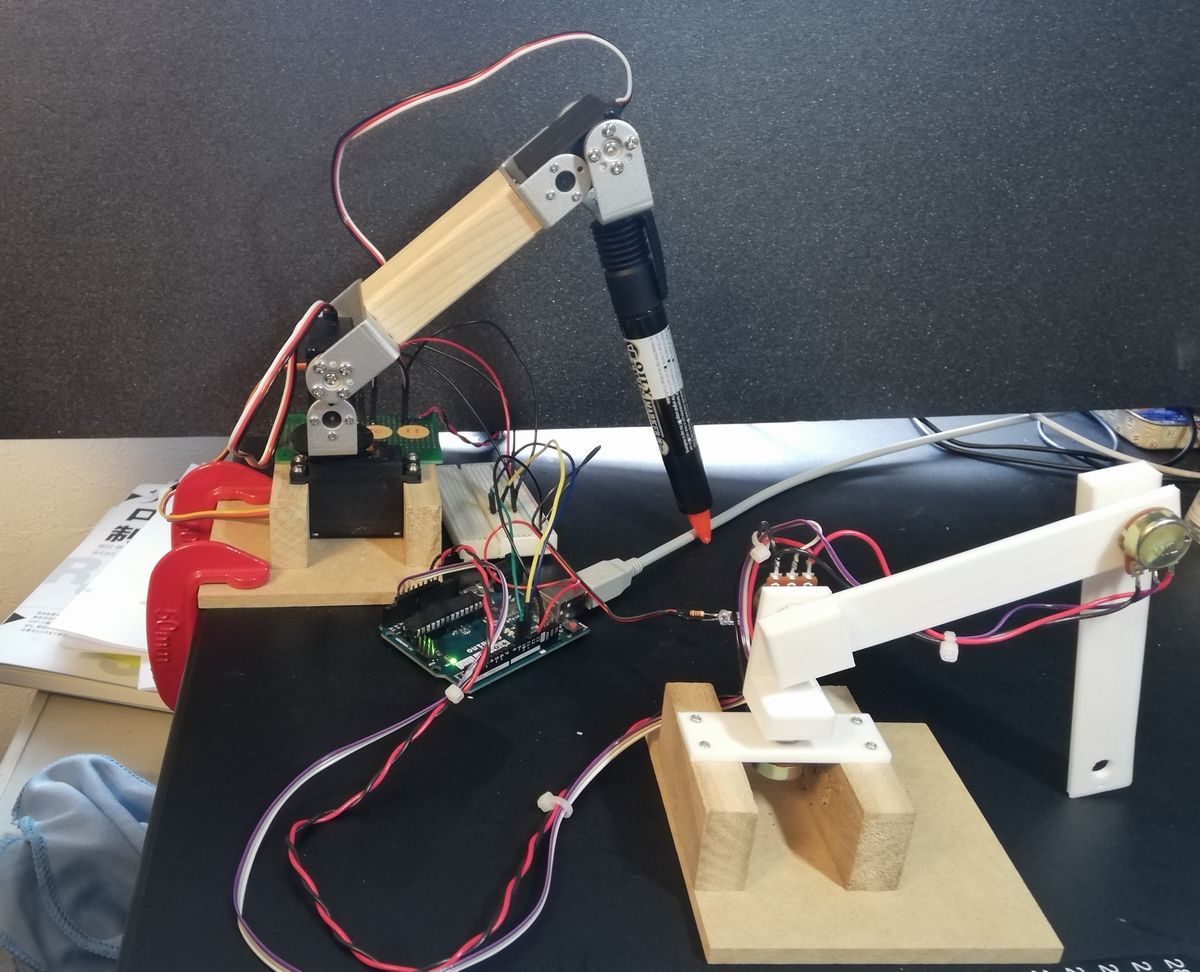
マイクロサーボでロボットアームを楽しむ
以前、製作したロボットアームを低価格で使いやすいマイクロサーボでも作ってみました。 https://homemadegarbage.com/arm05 動作 早速動作をご覧ください。前回同様にコントローラで制御しています。 ダイソーのお絵描き...
1軸 姿勢制御モジュール の筐体製作 ーリアクションホイールへの道5ー
前回はM5Stack ATOM Matrixと内蔵の慣性センサMPU6886でモータ制御するところまで確認いたしました。 ここでは1軸姿勢制御モジュールの筐体を作りこんで 簡単に動作確認を実施いたしました。 筐体製作 1軸姿勢制御モジュールの筐体を製作します。 筐体は3Dプリ...
電子工作 2020.8.3 お父ちゃん ![]()
自作ロボットアーム動作の 記録・再生 機能
以前 自作ロボットアームを自作コントローラで制御するというものを紹介させていただきました。 https://homemadegarbage.com/arm05 実はこれには動きをレコードして再生する機能も追加しており、上の記事の最後にサラッと紹介したのですが、詳細知りたいとのありがたいコメントい...
オリジナルプロッタ eddyWrite の分解能を向上
前回 製作したオリジナルのプロッタ eddyWrite (エディライト) の分解能の向上を実現しましたので報告させてください。 https://homemadegarbage.com/eddywrite01 スクリュー 前回は半径方向の分解能が16、回転1周の分...
電子工作 2020.2.27 お父ちゃん ![]()

PovRanian の筐体を3Dプリンタにて
昨年末に購入した3DプリンタでPovRanian の筐体を作ってみました! 今までは木とか金具で構成していたので。。。 [amazonjs asin="B07J5P3SP9" locale="JP" title="ANYCUBIC MEGA-S 3Dプリンター 金属製 高精度 Titan押出機 ...
電子工作 2020.2.13 お父ちゃん ![]()
自作コントローラで制御 ーロボットアーム自作への道5ー
Arduino Advent Calendar 2019 | 19日目 さてここまでは主に逆運動学によってロボットアームを制御してきましたが、やっぱり物理コントローラでグリグリしたくなるのが摂理。 ロボットアームを2対用意して、一方を手で動かして他方が追従するみたいのがやりたかったのですが、 ...
Advent Calendar / ロボットアーム / 電子工作 2019.12.19 お父ちゃん ![]()

我が家に3Dプリンタがやって来るヤァ!ヤァ!ヤァ!
遂に手に入れました!3Dプリンタ!! 先日家族で見に行ったNT札幌にて展示されていた3Dプリンタをみてお母ちゃんが思いのほか感動して"今すぐほしい!"となったのです。私的には来年あたりに買えればいいかなぁ位だったのですが太鼓判いただき年内に買おうということに相成りました♪ サイバーマンデーなどの...
Advent Calendar / 電子工作 2019.12.18 お父ちゃん ![]()