1軸 姿勢制御モジュール の筐体製作 ーリアクションホイールへの道5ー
本記事にはアフィリエイト広告が含まれます。
前回はM5Stack ATOM Matrixと内蔵の慣性センサMPU6886でモータ制御するところまで確認いたしました。
ここでは1軸姿勢制御モジュールの筐体を作りこんで
簡単に動作確認を実施いたしました。
目次
筐体製作
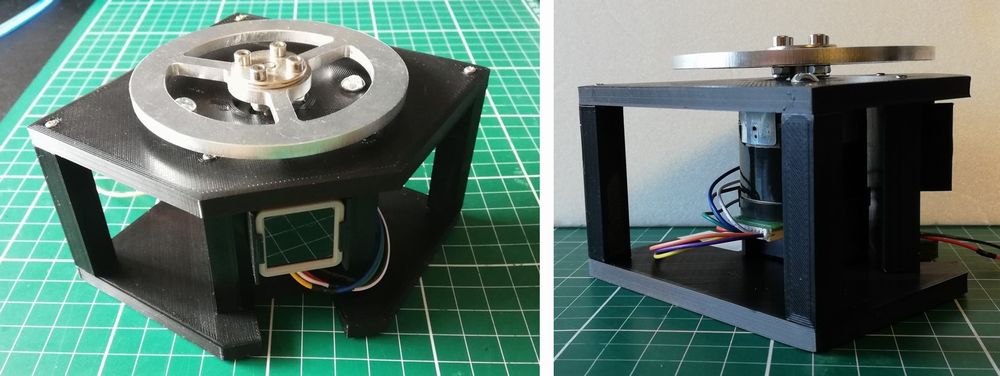
1軸姿勢制御モジュールの筐体を製作します。
筐体は3Dプリンタで製作いたしました。
モータ寸法
モータの寸法はAliExpressのモータID-549XW 販売ページ と実機計測で把握しました。


Fusion360設計
Fusion360で筐体設計いたしました。
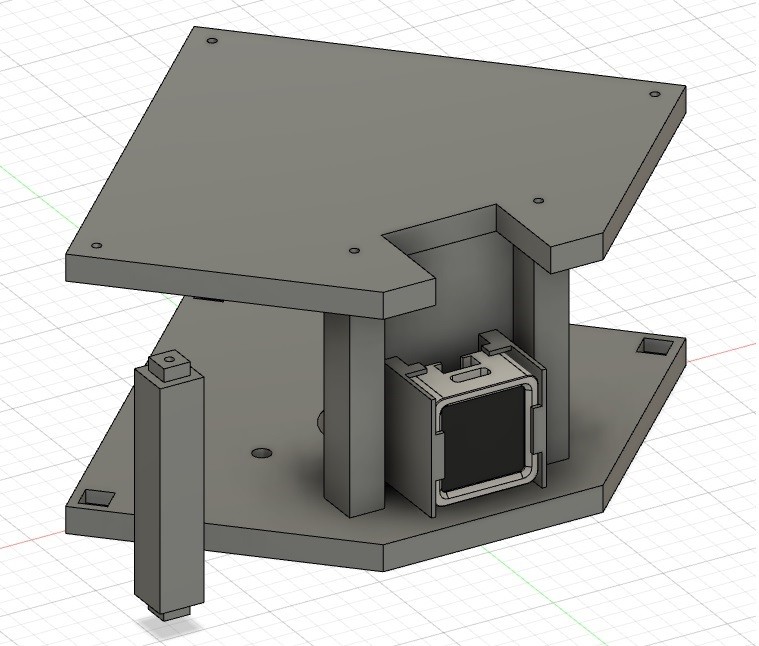
M5Stack ATOM Matrixもきっちり収まるように設計いたしました。
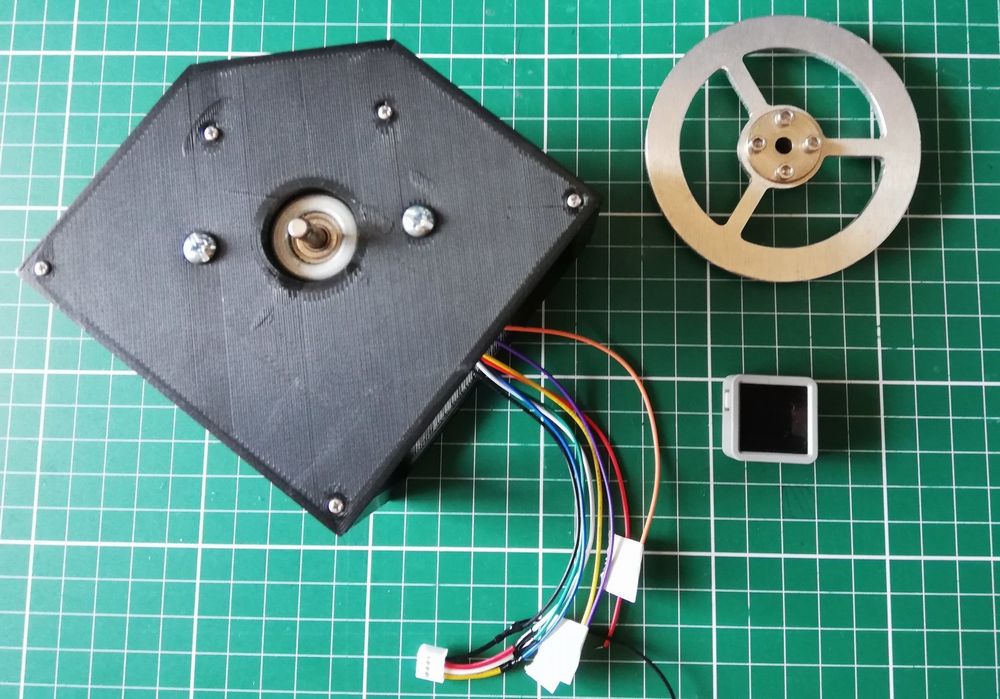
3Dプリント
ANYCUBIC MEGA-Sで出力いたしました。
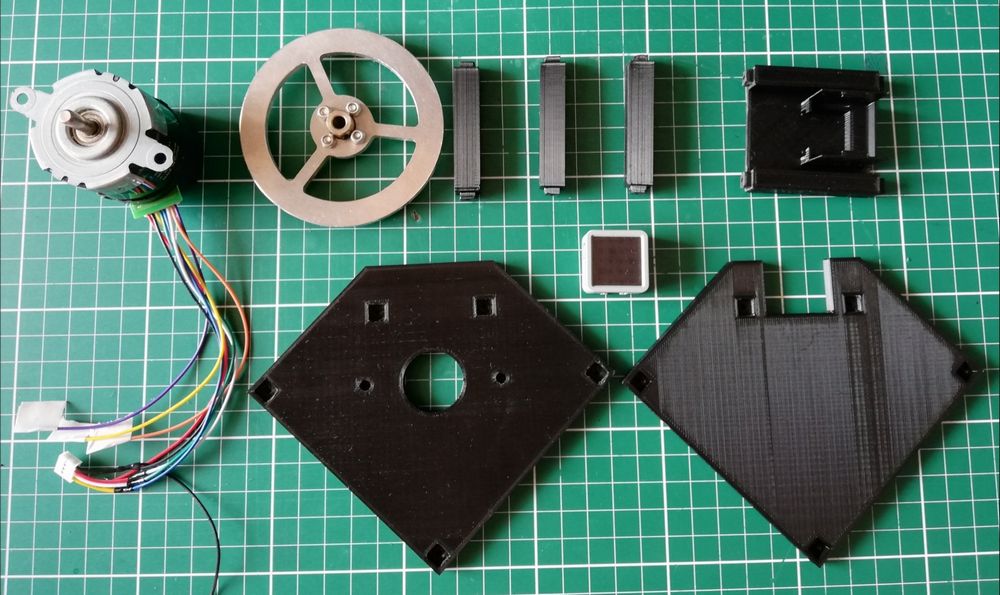
モータとM5ATOMと一緒に組み立てます。
動作
前回 とほぼ同じコードと配線構成で動作確認いたしました。
とりあえずモータ電源なしで動作確認
SHISEIGYO-1#リアクションホイールへの道#M5ATOM #M5stack pic.twitter.com/CUaDS4rNvG
— HomeMadeGarbage (@H0meMadeGarbage) August 1, 2020
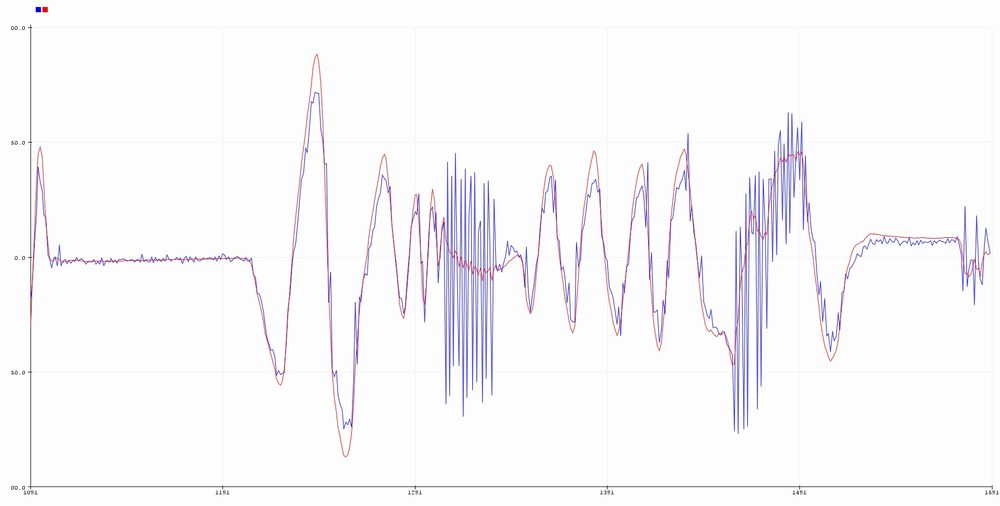
モータ電源12Vを印可して動作確認。
やはり単純に傾きに比例して回転させる制御 (P制御)では立ちそうもありませんね。。。
しかし筐体はバッチリできたと言えそうです。
とてもかわいらしく製作できたので、この子をSHISEIGYO-1 (シセーギョー ワン)と名付けました。
おわりに
1軸姿勢制御モジュールの筐体が完成いたしました。
次回以降でしっかり制御を学んで倒立の実現を目指したいと思います。
それでは次の道でお会いしましょう!
次の記事

関連記事
 1軸 姿勢制御モジュール の倒立に向けた準備 ーリアクションホイールへの道6ー
1軸 姿勢制御モジュール の倒立に向けた準備 ーリアクションホイールへの道6ー
 1軸 姿勢制御モジュール がやっと立った ーリアクションホイールへの道7ー
1軸 姿勢制御モジュール がやっと立った ーリアクションホイールへの道7ー
 カルマン・フィルタで ATOM Matrix 傾斜計 ーリアクションホイールへの道3ー
カルマン・フィルタで ATOM Matrix 傾斜計 ーリアクションホイールへの道3ー
 ATOM Matrix の慣性センサでモータ制御 ーリアクションホイールへの道4ー
ATOM Matrix の慣性センサでモータ制御 ーリアクションホイールへの道4ー
 1軸 姿勢制御モジュール の改良 ーリアクションホイールへの道8ー
1軸 姿勢制御モジュール の改良 ーリアクションホイールへの道8ー
 1軸 姿勢制御モジュール 起き上がり実験 ーリアクションホイールへの道9ー
1軸 姿勢制御モジュール 起き上がり実験 ーリアクションホイールへの道9ー
 3軸 姿勢制御モジュール SHISEIGYO-3 への挑戦そして挫折 ーリアクションホイールへの道16ー
3軸 姿勢制御モジュール SHISEIGYO-3 への挑戦そして挫折 ーリアクションホイールへの道16ー
 3軸 姿勢制御モジュール SHISEIGYO-3 安定点倒立メソッドの確立 ーリアクションホイールへの道23ー
3軸 姿勢制御モジュール SHISEIGYO-3 安定点倒立メソッドの確立 ーリアクションホイールへの道23ー