マイクロサーボでロボットアームを楽しむ
本記事にはアフィリエイト広告が含まれます。
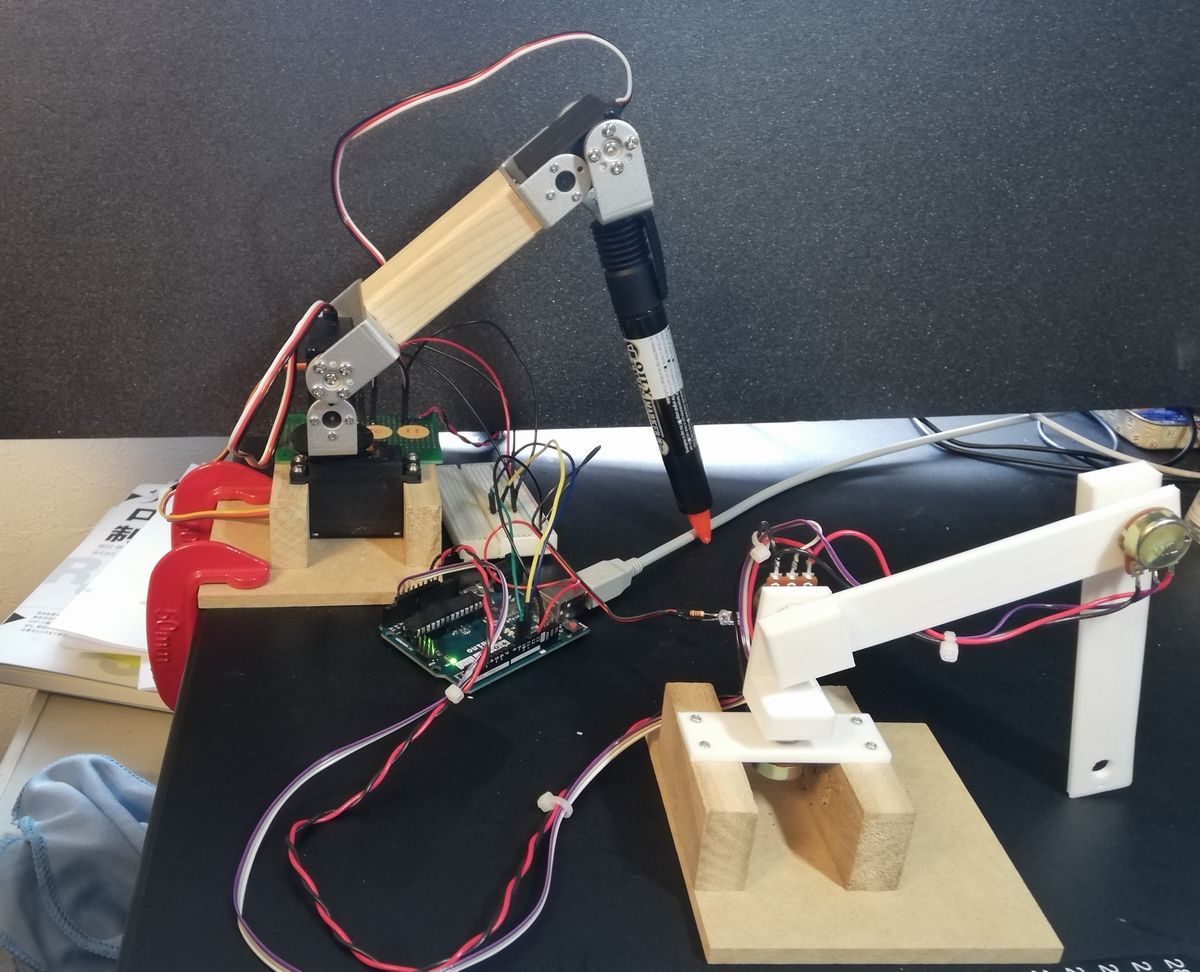
以前、製作したロボットアームを低価格で使いやすいマイクロサーボでも作ってみました。
目次
動作
早速動作をご覧ください。前回同様にコントローラで制御しています。
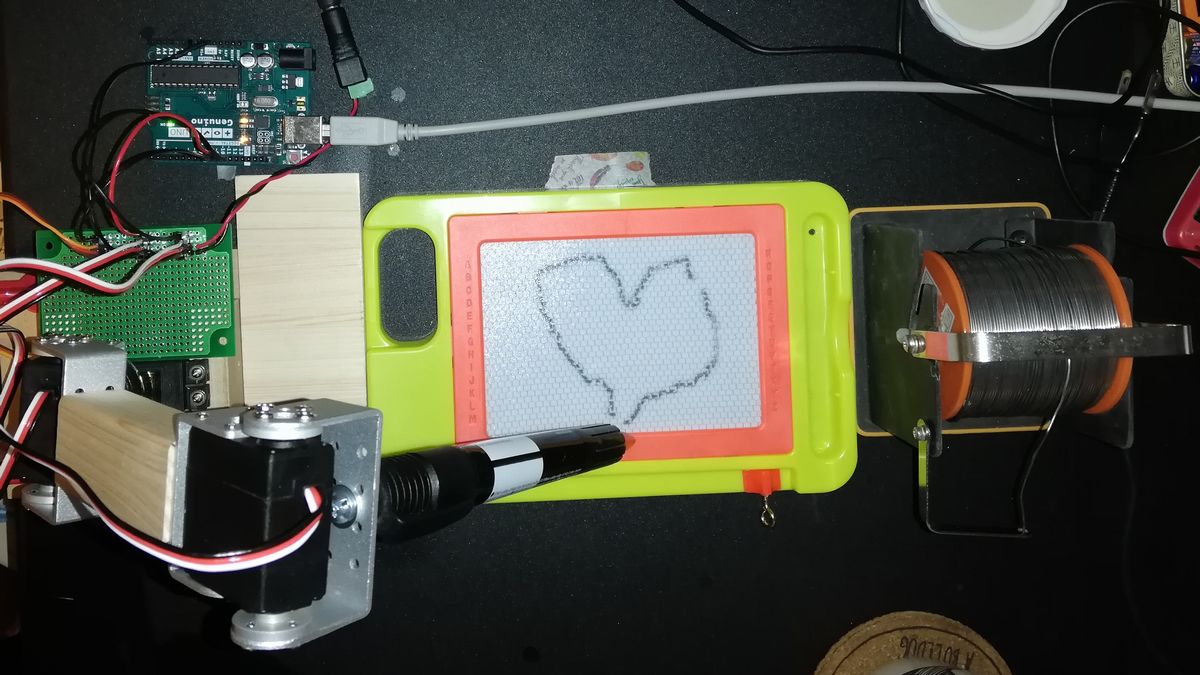
ダイソーのお絵描きボードに固定して字を書いてみました。
トルクが足りず消去ツマミを引き戻すのは難しかったです。
計算ミス
アーム短かった。。。#猫 pic.twitter.com/YnokMuN6PC— HomeMadeGarbage (@H0meMadeGarbage) September 6, 2021
構成
構成はサーボの種類が異なるのみで 前回と同じです。
コントローラは可変抵抗で構成。
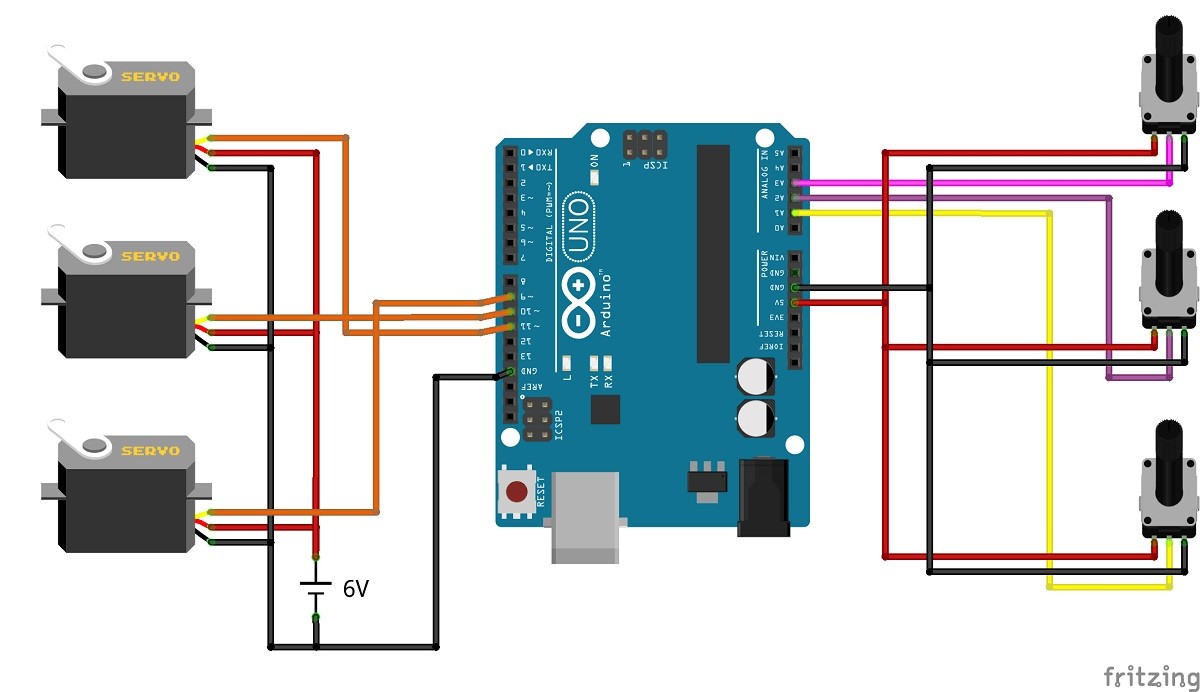
部品
- Arduno UNO
- マイクロサーボモータ
- 可変抵抗 10kohm
マイクロサーボ
マイクロサーボはトルクも機械強度も小さいです。
今回ロボットアームを作るにあたり機構に工夫を凝らしました。
治具は3Dプリンタでこしらえました。
今後の人生 マイクロサーボを良い関節として
付き合っていくための検討Miuzei サーボモーター マイクロサーボ 9g を Amazon でチェック! https://t.co/79G3yZl0LZ pic.twitter.com/piAYR4XycL
— HomeMadeGarbage (@H0meMadeGarbage) September 5, 2021
今後の人生 マイクロサーボを良いターンテーブルとして付き合っていくための検討
Miuzei サーボモーター マイクロサーボ 9g を Amazon でチェック! https://t.co/79G3yZl0LZ pic.twitter.com/1fw0PZEKM0
— HomeMadeGarbage (@H0meMadeGarbage) September 5, 2021
#電子工作 pic.twitter.com/KUSevmMZAZ
— HomeMadeGarbage (@H0meMadeGarbage) September 5, 2021
スムージング
Twitterで面白い施策が紹介されていました。
サーボモーターを制御するときに適切な加速度を設定することで生き物っぽく見せるテクニックとそのプログラミング方法について紹介している。 / “Smooth Servo Motion For Lifelike Animatronics | Hackaday” (1 user) https://t.co/J45aARzZra
— ina_ani@1歳児のパパ (@ina_ani) September 11, 2021
制御信号に対してLPF的な遅れをもたせてサーボで生物的な動きを実現するものです。
早速ロボットアームに導入して比較してみました。
機械的な急峻な動きが緩和され、生き物のような柔らかみのある動作が実現できました。
meddle pic.twitter.com/NQeipxMkRl
— HomeMadeGarbage (@H0meMadeGarbage) September 6, 2021