ギアドモータで屈伸型倒立振子
本記事にはアフィリエイト広告が含まれます。
以前 ギアドモータを用いて倒立振子製作を楽しみました。
小型で軽いのでギアドモータで屈伸型の倒立振子の製作も試してみました。
目次
筐体製作
屈伸型の筐体を3Dプリントで製作します。
頭切り替えて電子工作するわ pic.twitter.com/lXgDmpzAgd
— HomeMadeGarbage (@H0meMadeGarbage) September 9, 2023
屈伸用サーボとして STS3032 を使用し、ホイール駆動用にギアドモータを使用します。
筐体は以前製作した屈伸型倒立振子をギアドモータ用にカスタマイズして設計しました。
とりあえずホイール用のギアドモータのみ制御して動作確認
結局 1000rpmのギアドモータ使用
うーん回転速度検知したい pic.twitter.com/zHZrN1kmyu— HomeMadeGarbage (@H0meMadeGarbage) September 12, 2023
ちょっと応答が間に合っていませんがコレで進めてみます。
ギアドモータは1000rpmのものを採用。
倒立振子 pic.twitter.com/RcS9SzLHkF
— HomeMadeGarbage (@H0meMadeGarbage) September 12, 2023

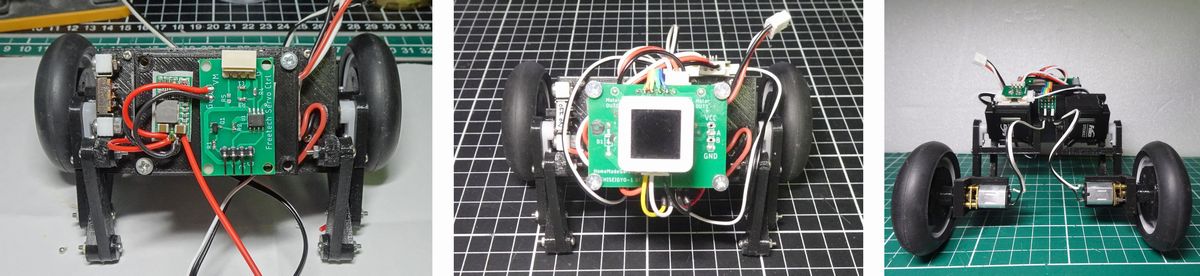
Feetechシリアルサーボ 通信基板
屈伸用に使用している STS3032 などのFeeTech製シリアルサーボとの通信用基板はこれまで手作りしてきましたが、ついに専用基板を製作しました。
Feetechシリアルサーボ 通信基板
いい加減 基板起こすか pic.twitter.com/Vj86CB8jHk— HomeMadeGarbage (@H0meMadeGarbage) August 6, 2023
製作した基板に部品を実装して無事に動作を確認できました。
やっと基板作った
コレで一生安泰 pic.twitter.com/JhOHaujXCl— HomeMadeGarbage (@H0meMadeGarbage) September 24, 2023
今後 Feetech製のシリアルサーボを使用する際はこの基板を活用いたします。
倒立振子製作
製作した Feetech用基板を活用して倒立振子システムを組んでいきます。
電源は2セルの7.4V LiPoバッテリを使用し、サーボ用電源としました。
LiPoからの7.4VをDCDCで5Vに降圧してATOMS3を載せた制御基板に供給します。
無事に足が動作
足動いた pic.twitter.com/kvD0dIKjMO
— HomeMadeGarbage (@H0meMadeGarbage) September 25, 2023
倒立動作
やはりモータの応答にもたつきがあってふらつくけど 何とか動作
もっと制御ループを速く出来れば ふらつきは低減すると思いますが現状もう限界です。
更にここではモータへの印加電圧をモータ回転速度としてフィードバックしていますが、エンコーダなどで正確にセンシングすればかなり動作は改善すると思います。
ただギアドモータを採用したことで外乱に強く、更に採用したモータが小型で軽いのでジャンプもできます (ちょっと浮くくらいですが)。
少しだけジャンプできた pic.twitter.com/MSvbGouDUJ
— HomeMadeGarbage (@H0meMadeGarbage) September 26, 2023
おわりに
これまで様々なモータをホイール駆動用に採用して動作確認しましたが、いずれも一長一短がありました。
引き続き手軽なところで部品探しを続けて、創意工夫で何とかしたいと思います。