電子工作初心者 お母ちゃんの SHISEIGYO-3 への道 ⑤制御基板の起動確認
本記事にはアフィリエイト広告が含まれます。
今日は制御基板の起動確認⊂(^ω^)⊃ブーン
下記作業を行いました。
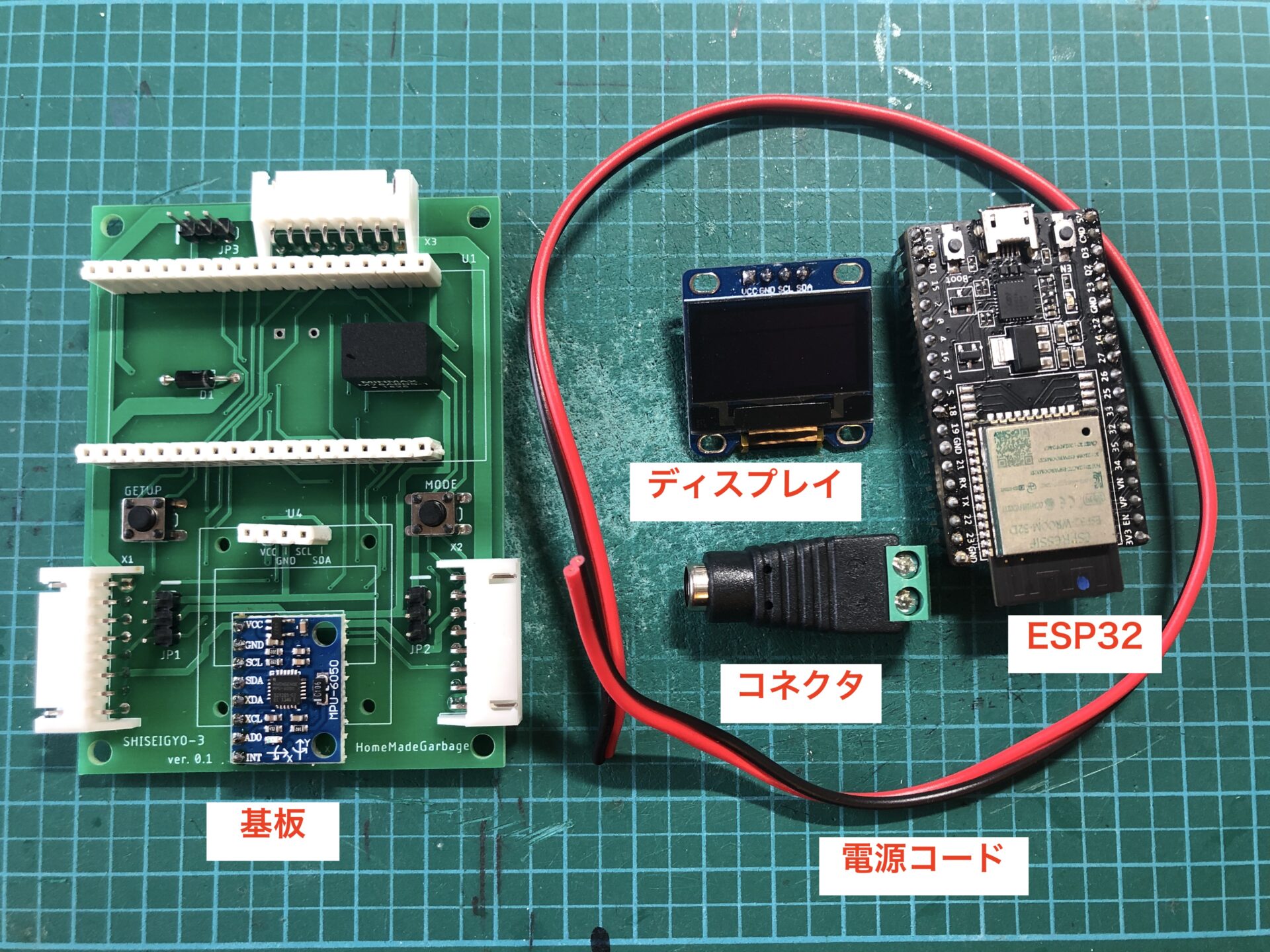
- 電源コードの接続
- ディスプレイ接続
- プログラム書き込み
前回はこちら
目次
電源コードの接続
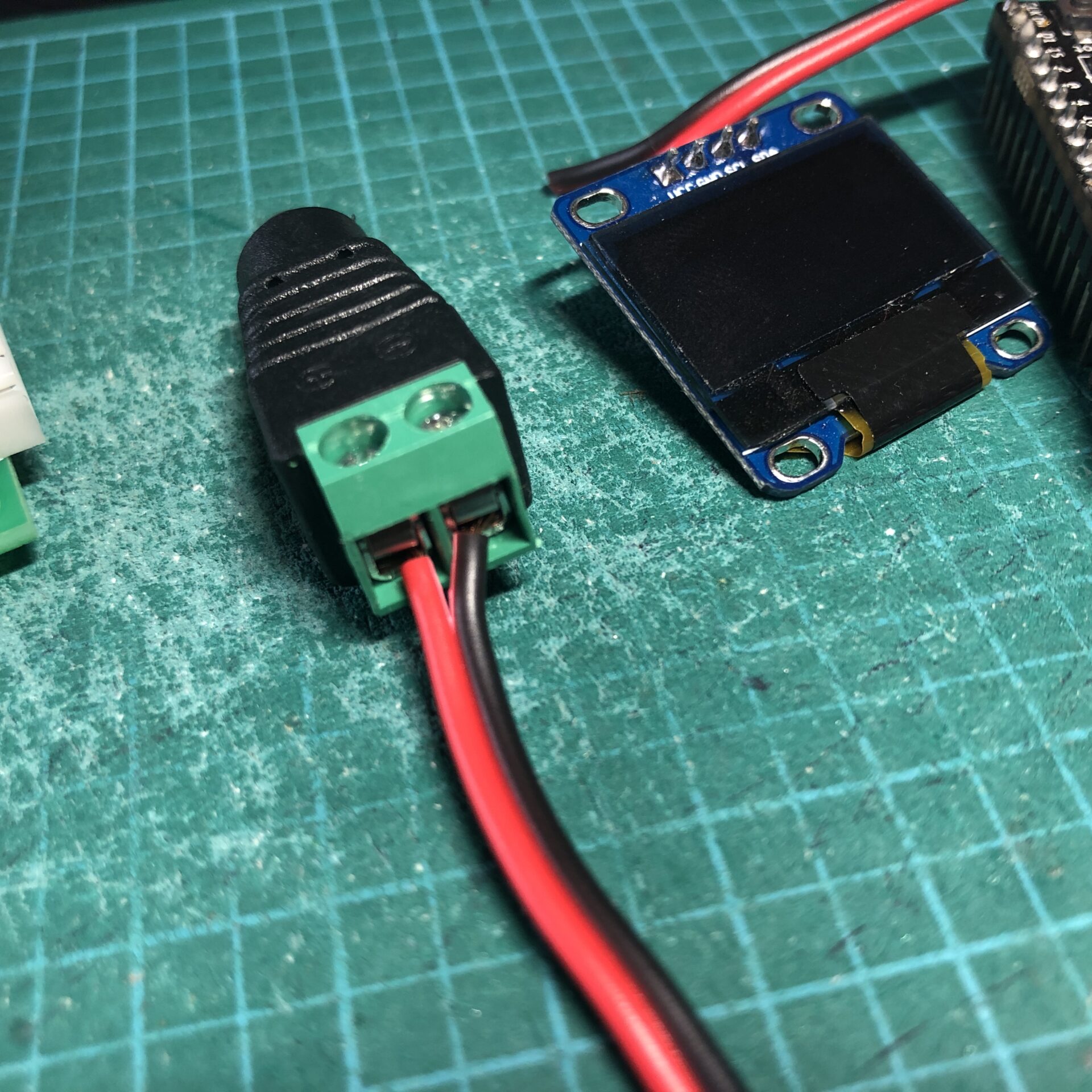
まず電源コードを取り付けて行きます。
コネクタ側
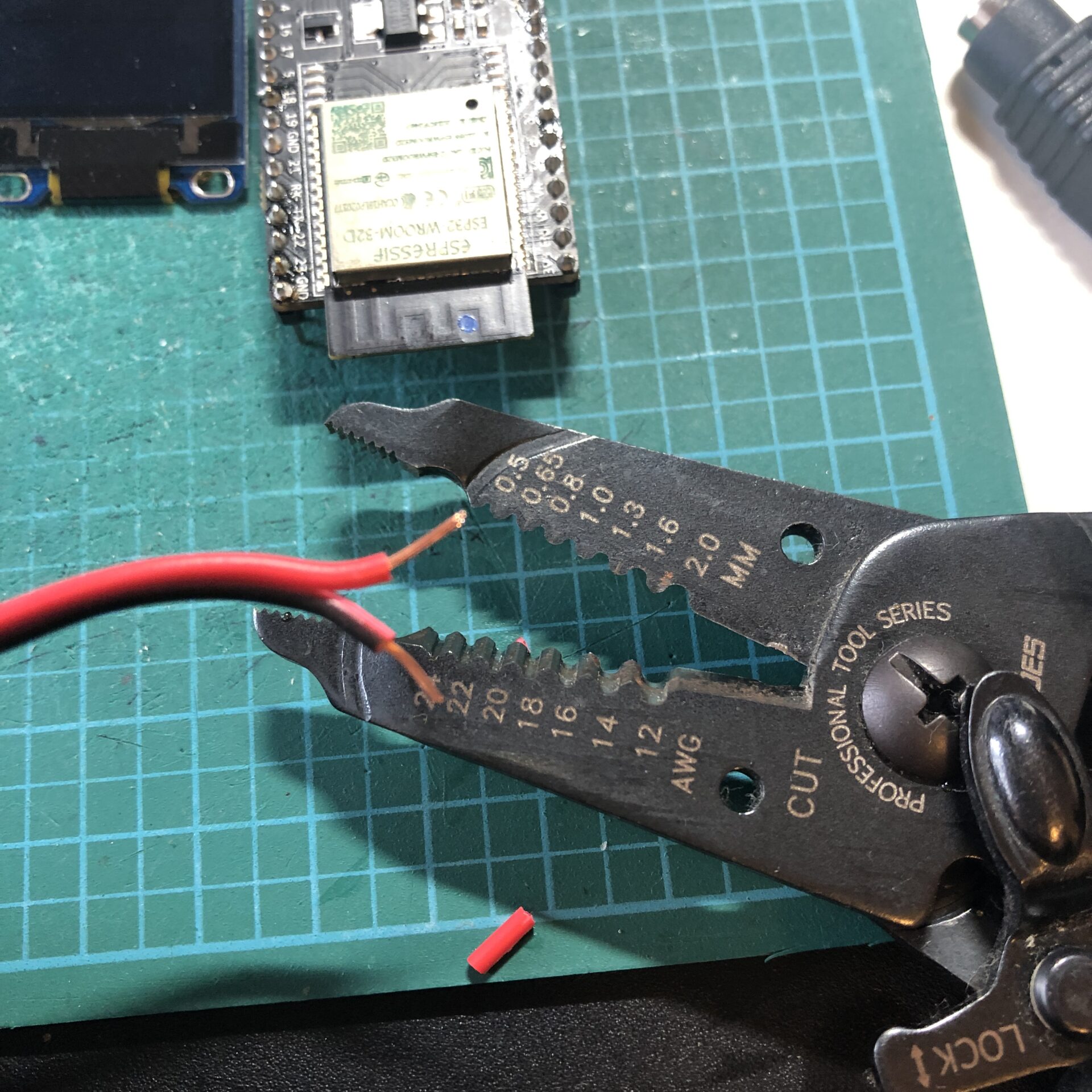
電源コード端を2cm位裂いて、ニッパーで1cm位切り取ります。
0.65mm で切り取りました。
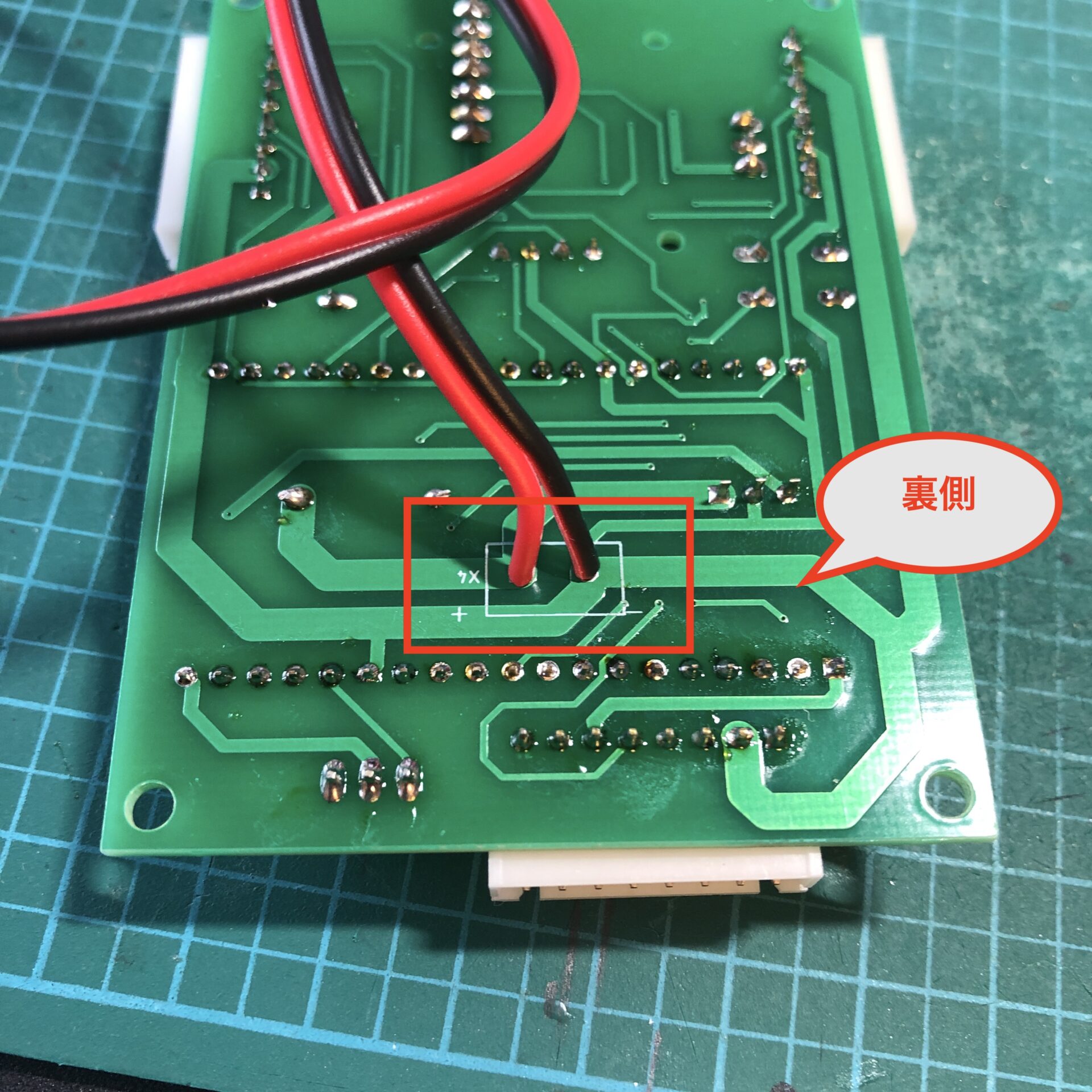
基板にはんだ付け
電源コードの反対側の端も裂いて、5~6mm位切り取ります。
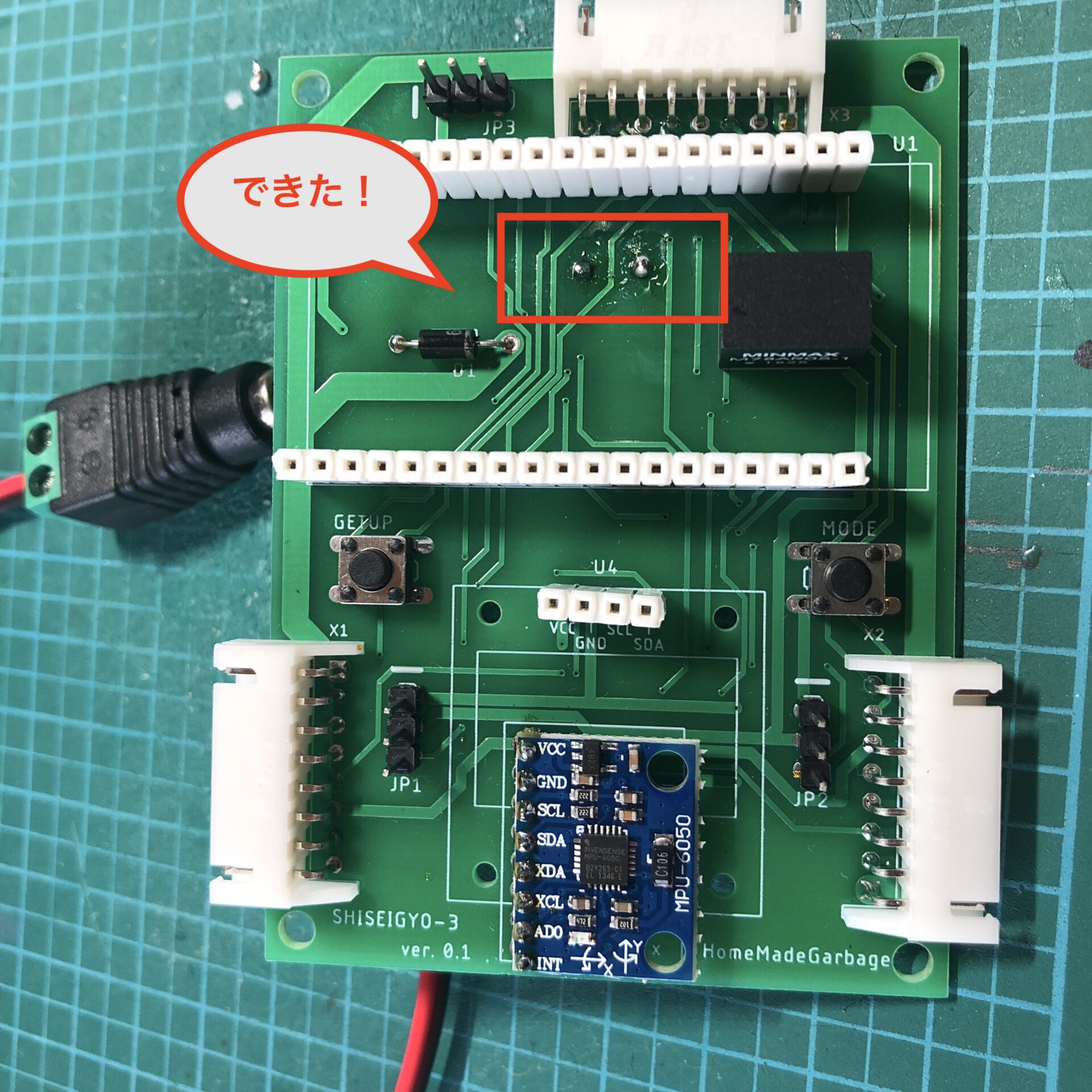
基板の裏から、プラス/マイナス に合わせて取り付けます。

久々のはんだ付け!|゚Д゚`)。o(ドキドキ)

角度が!難しい!
電源コードも熱くなってきた!
苦戦しつつなんとか付けるも、
出来栄えはいまいち・・
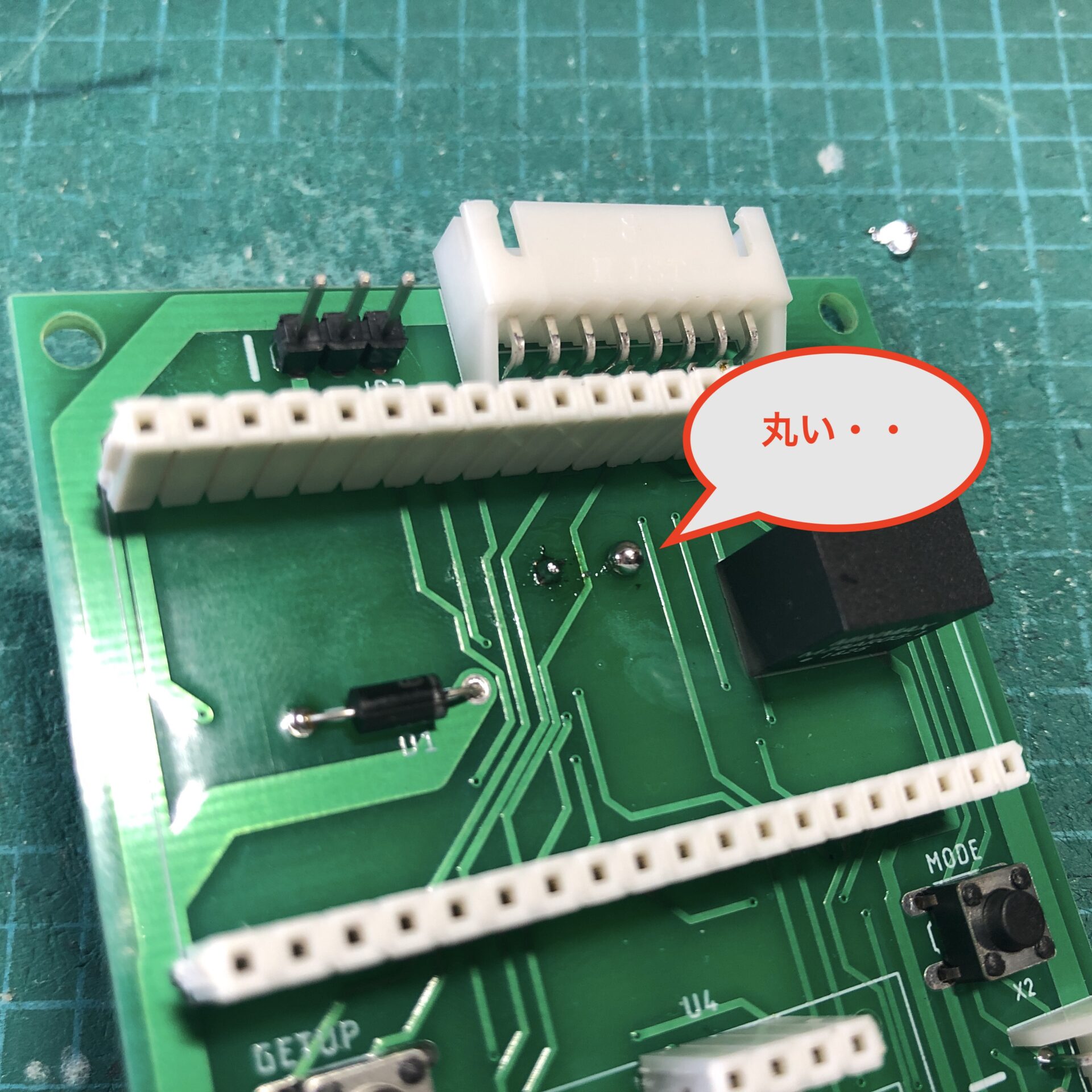
まつやにで取る。
(両方丸くなったから調整した)
なんとか・・でき・・た・・・!
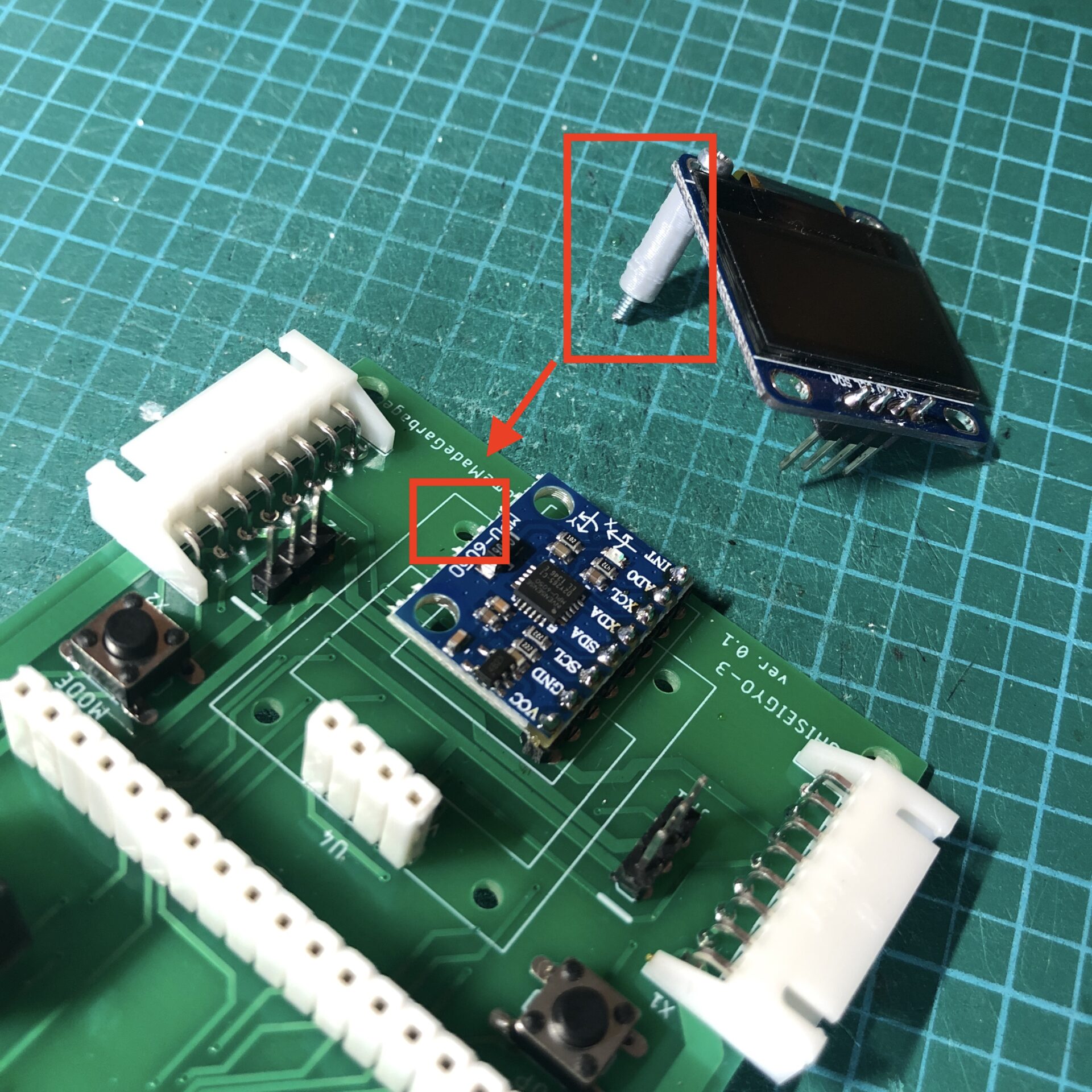
ディスプレイ取り付け
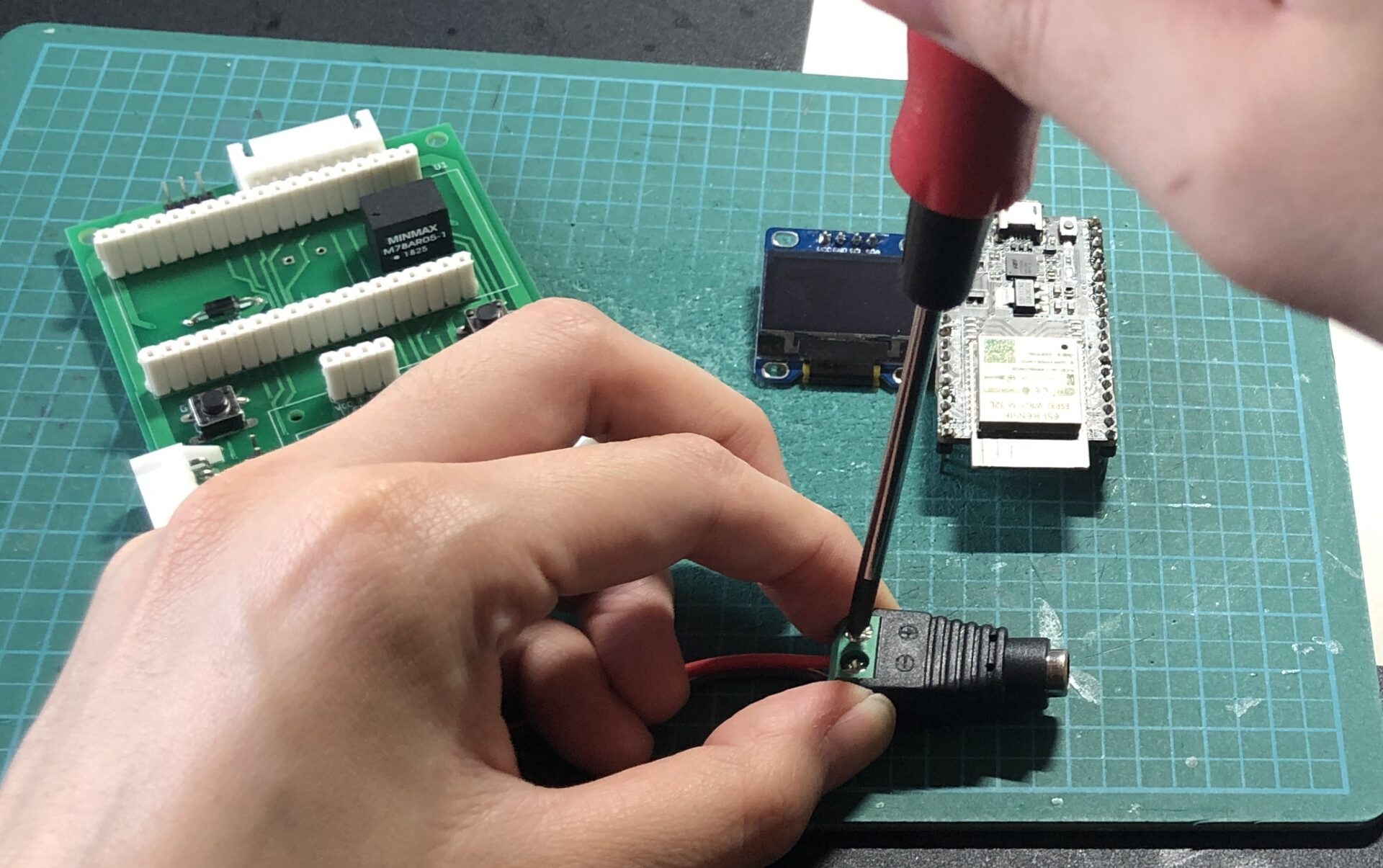
ディスプレイにネジと、
3Dプリンタで出力した足を差し込み、
基板に取り付けます。
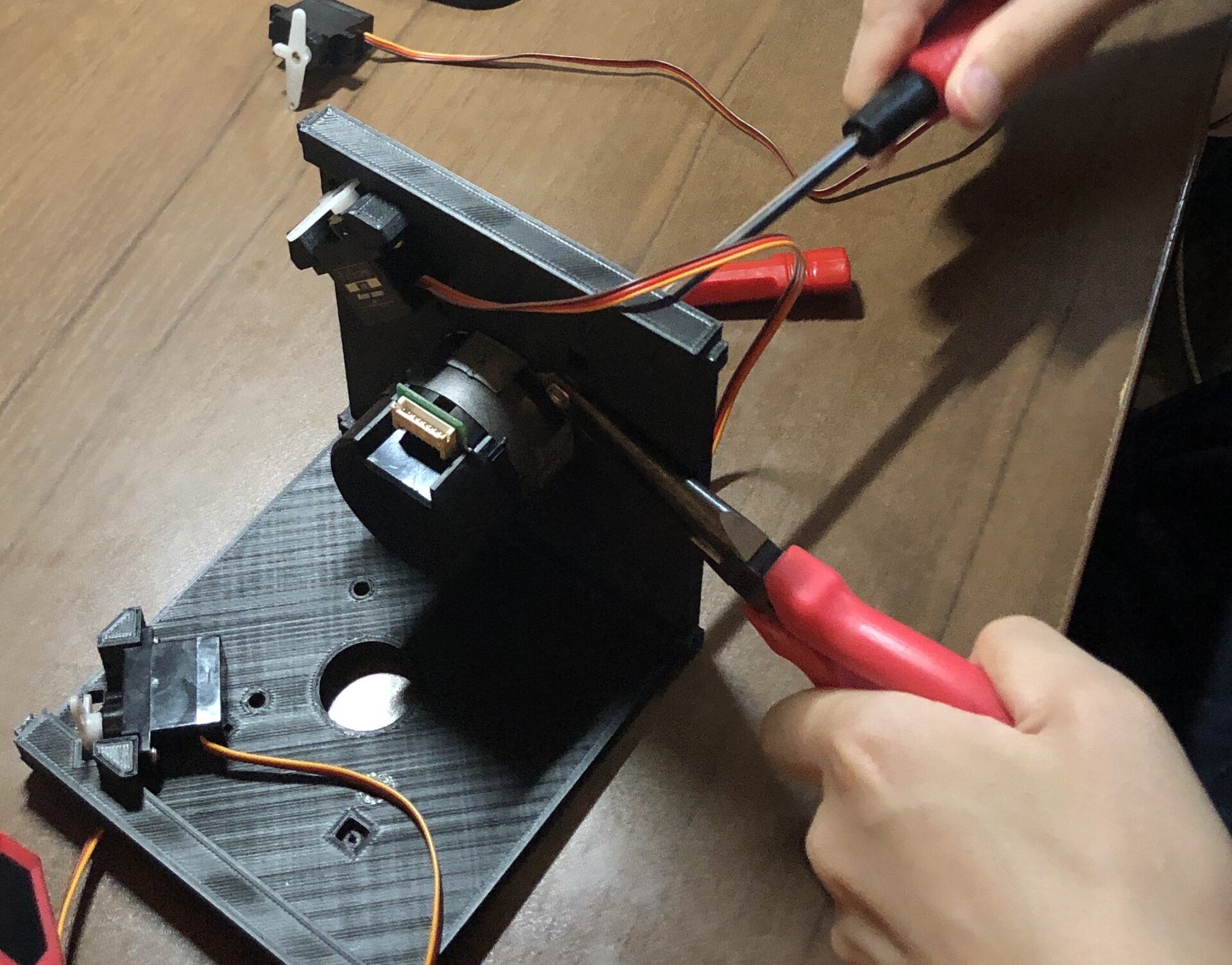
これもまたドライバーとペンチを駆使して苦戦しつつ、
なんとか取り付け!
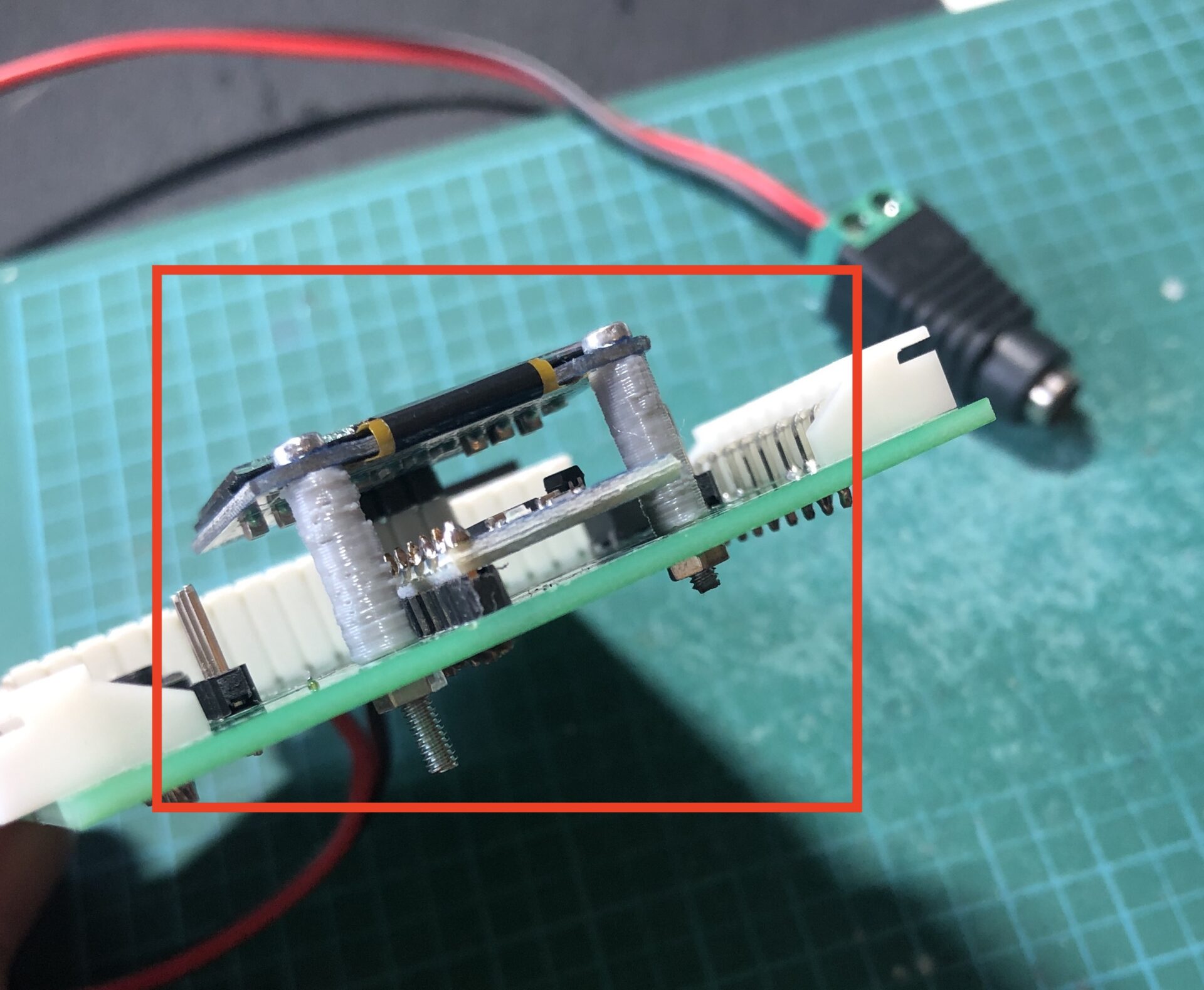
ネジの長さが違うのは意味はありません。
(片方のネジは長すぎて切ったネジらしく今これしか無いから。)
できた!
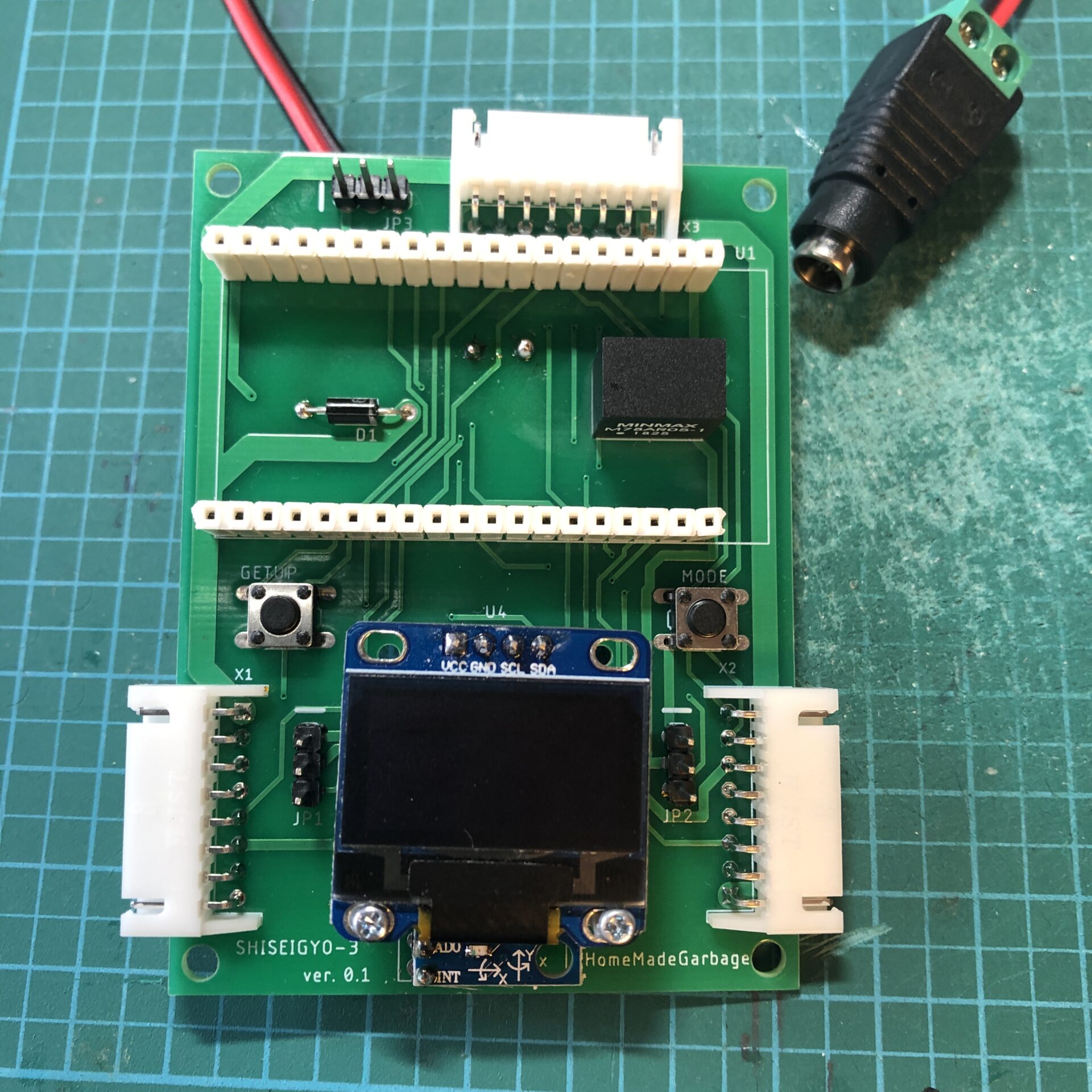
ディスプレイちょっと曲がってますが問題ありません!⊂(^ω^)⊃ セフセフ
(1回目のはんだ付けで曲がってしまったため)
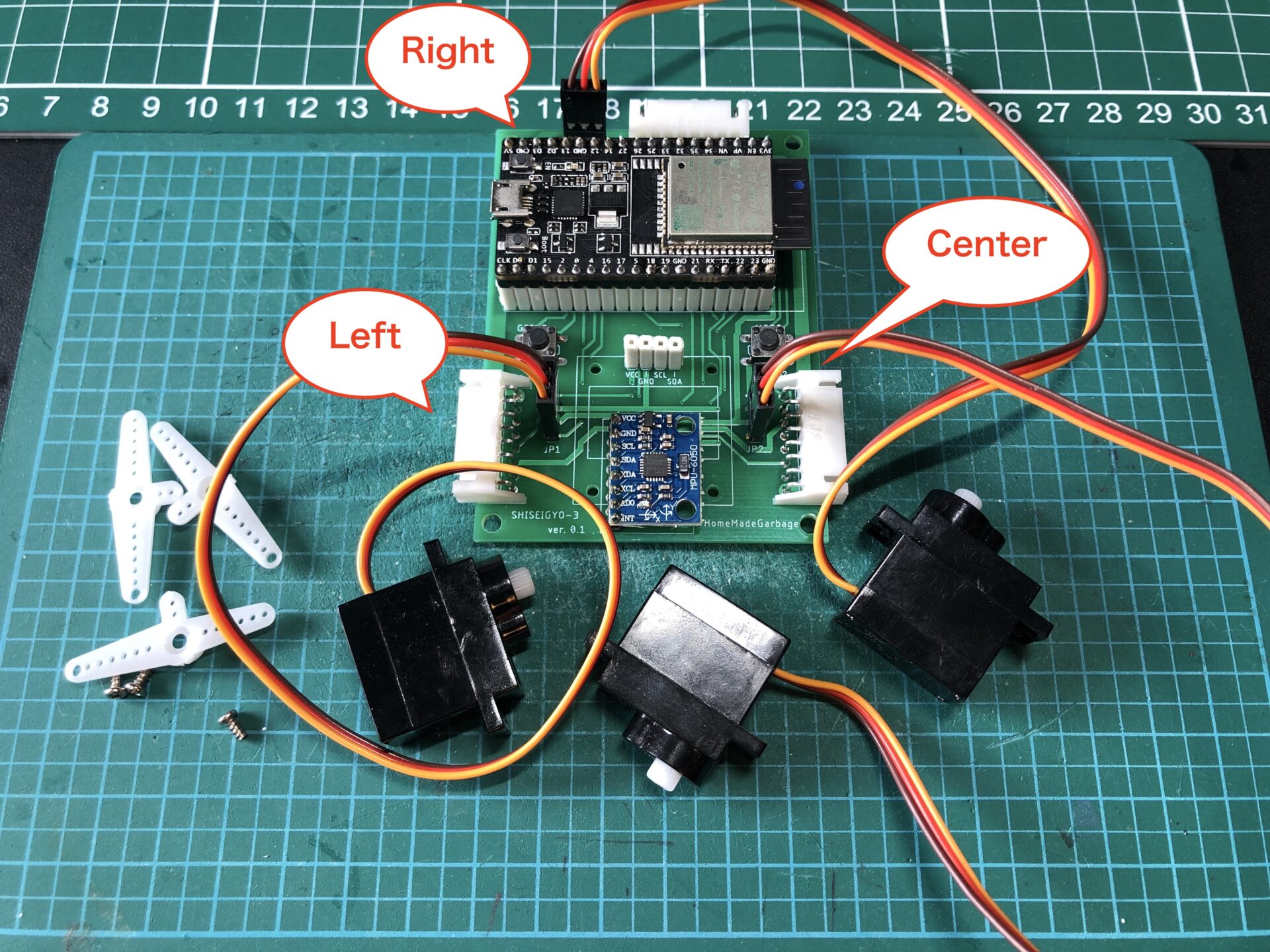
本番プログラム書き込み
本番プログラムの、
前回調整したサーボ角度と
③で調整したオフセット値を書き換え、
書き込み動作確認。
動いた〜!
終わりに
お父ちゃん に 色々教わりながら進めているわけですが・・
これらの動作が電気信号で行われているというのもすごい事だなぁと
改めて興味が出てきました。
( ^ω^) < 不思議〜
次回は モーター接続ケーブルの作成をします。
次の記事

関連記事
 電子工作初心者 お母ちゃんの SHISEIGYO-3 への道① 初めてのはんだ付け
電子工作初心者 お母ちゃんの SHISEIGYO-3 への道① 初めてのはんだ付け
 電子工作初心者 お母ちゃんの SHISEIGYO-3 への道② はんだ付け
電子工作初心者 お母ちゃんの SHISEIGYO-3 への道② はんだ付け
 電子工作初心者 お母ちゃんの SHISEIGYO-3 への道④ サーボ角度調整
電子工作初心者 お母ちゃんの SHISEIGYO-3 への道④ サーボ角度調整
 電子工作初心者 お母ちゃんの SHISEIGYO-3 への道 ⑥モーター接続ケーブルの作成
電子工作初心者 お母ちゃんの SHISEIGYO-3 への道 ⑥モーター接続ケーブルの作成
 電子工作初心者 お母ちゃんの SHISEIGYO-3 への道⑦筐体(内側)の組み立て
電子工作初心者 お母ちゃんの SHISEIGYO-3 への道⑦筐体(内側)の組み立て
 電子工作初心者 お母ちゃんの SHISEIGYO-3 への道⑧ブレーキ&ホイール取り付け
電子工作初心者 お母ちゃんの SHISEIGYO-3 への道⑧ブレーキ&ホイール取り付け
 電子工作初心者 お母ちゃんの SHISEIGYO-3 への道⑨組み立て完成!
電子工作初心者 お母ちゃんの SHISEIGYO-3 への道⑨組み立て完成!
 電子工作初心者 お母ちゃんの SHISEIGYO-3 への道⑩起き上がり動作確認・・完成!
電子工作初心者 お母ちゃんの SHISEIGYO-3 への道⑩起き上がり動作確認・・完成!