電子工作初心者 お母ちゃんの SHISEIGYO-3 への道④ サーボ角度調整
本記事にはアフィリエイト広告が含まれます。
前回から半年も経過してしまいました。
オフセット測定までで中断していたので、
今回はサーボ角度調整から再開して行きたいと思います。

目次
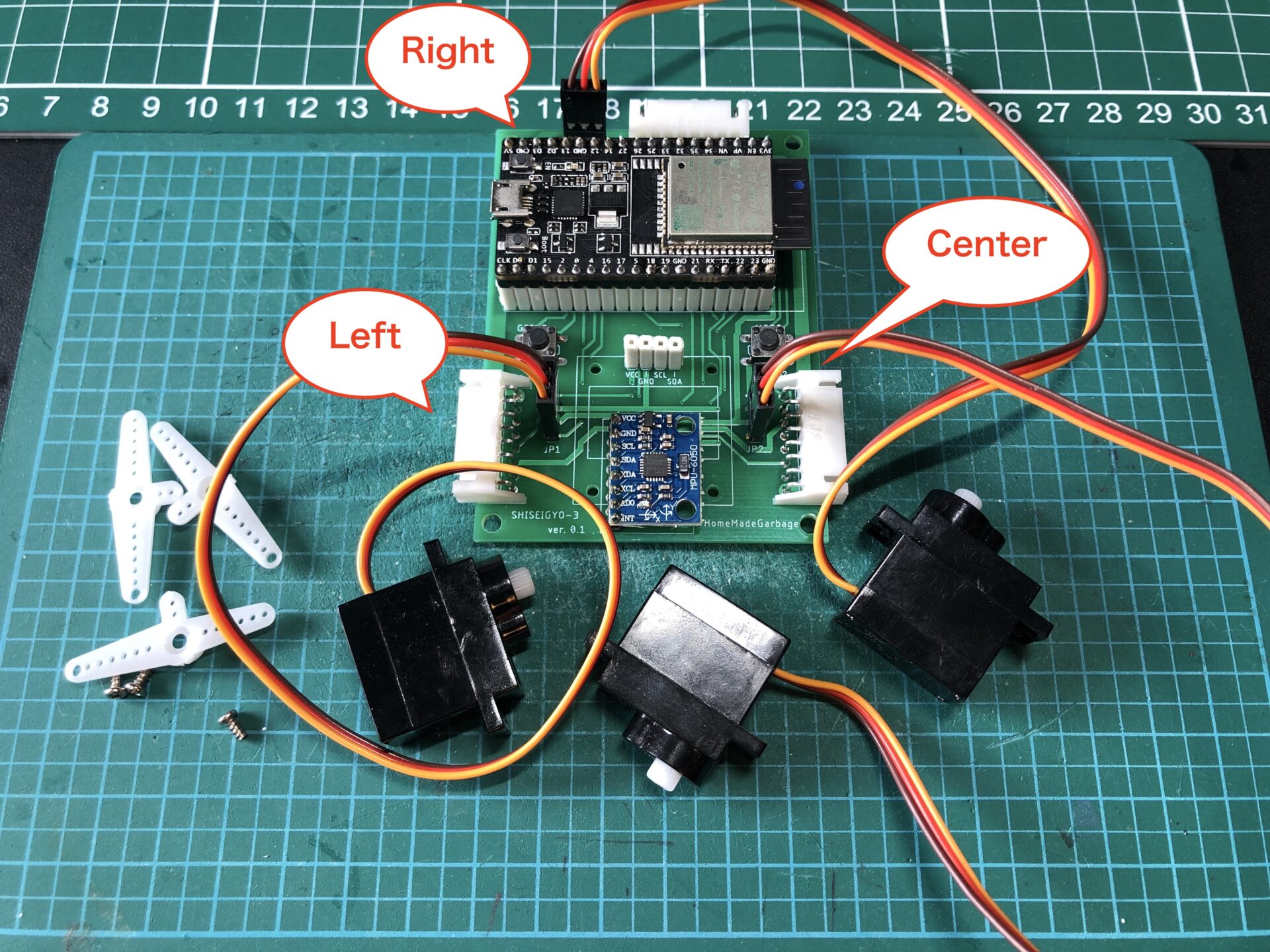
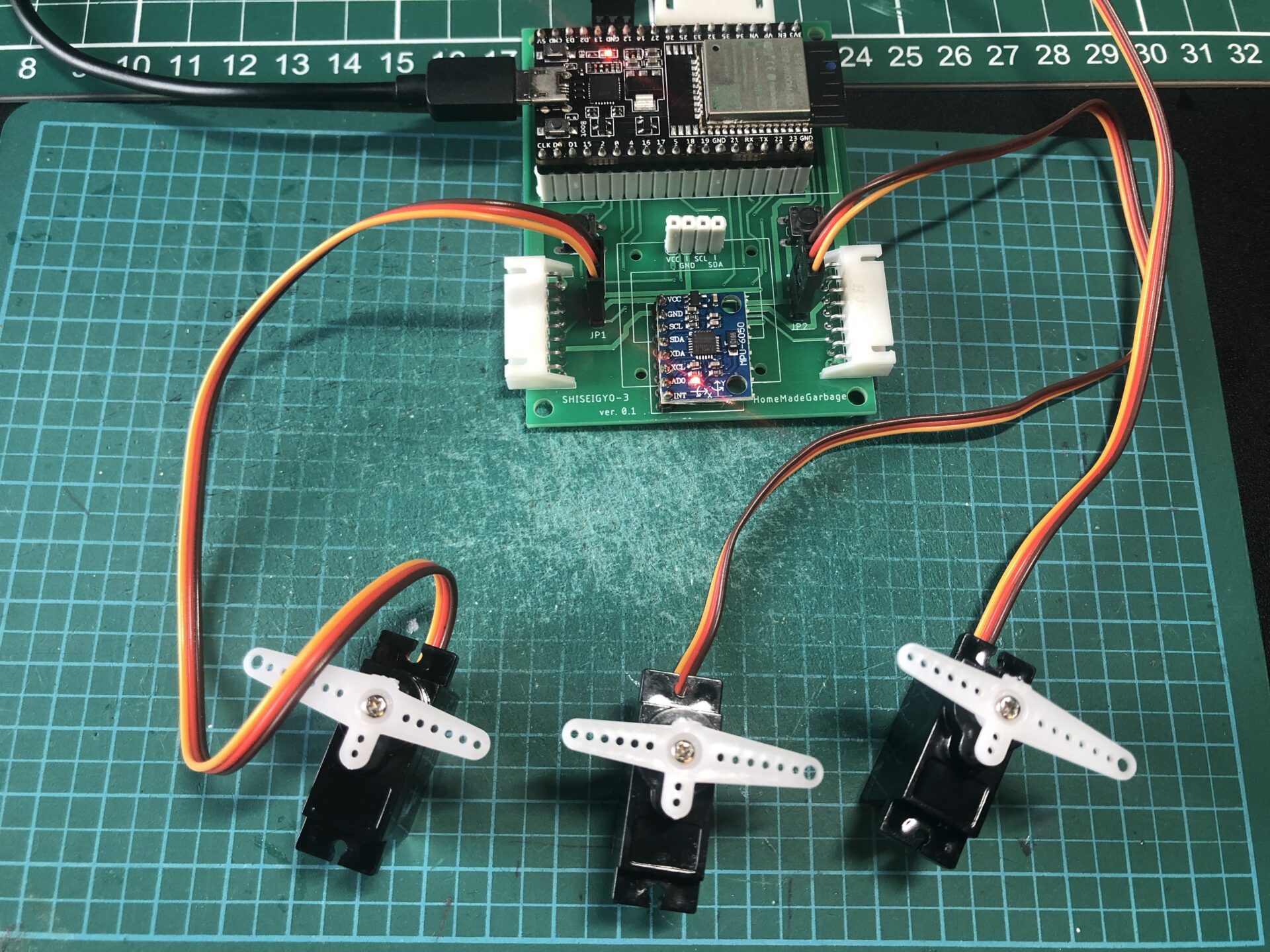
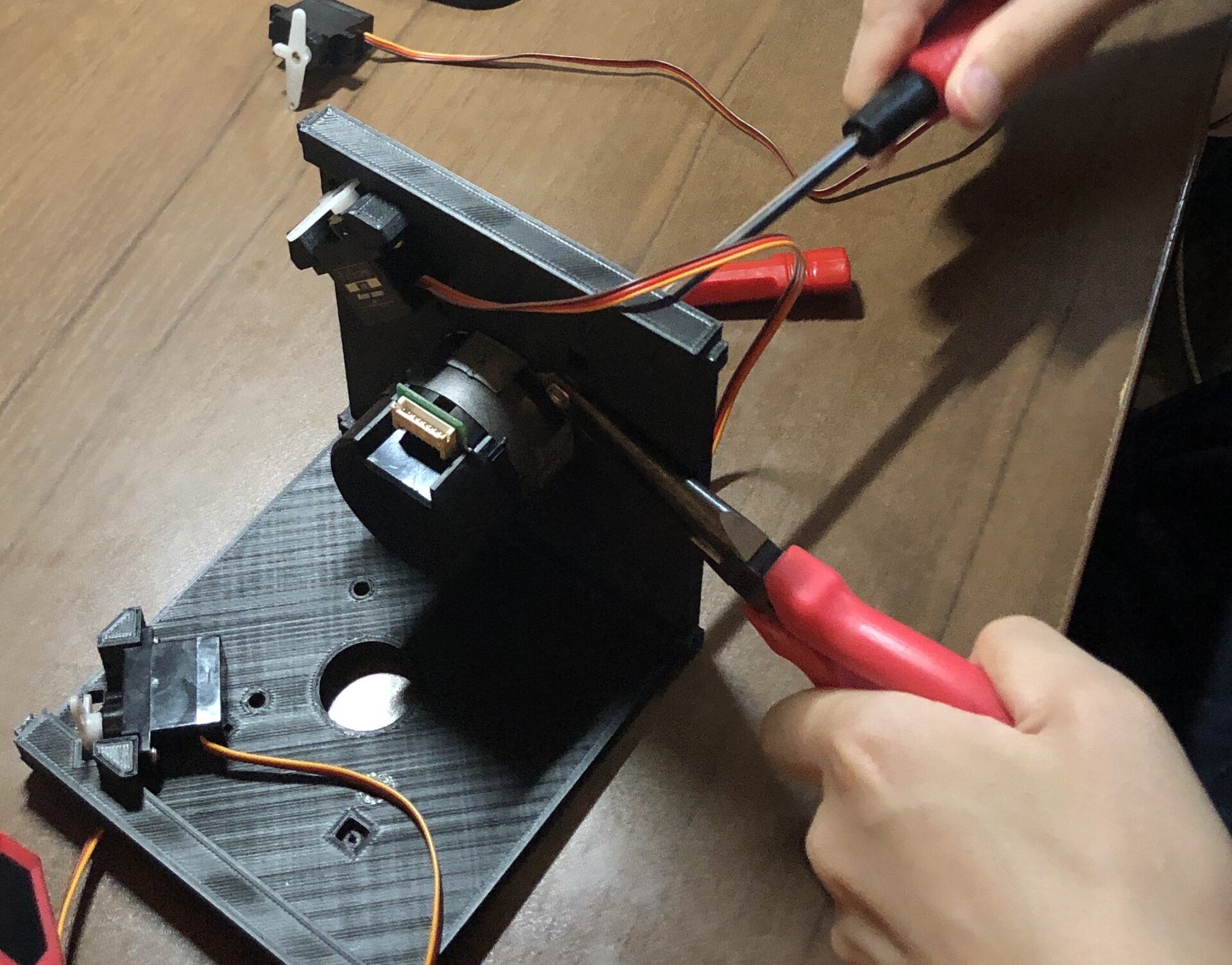
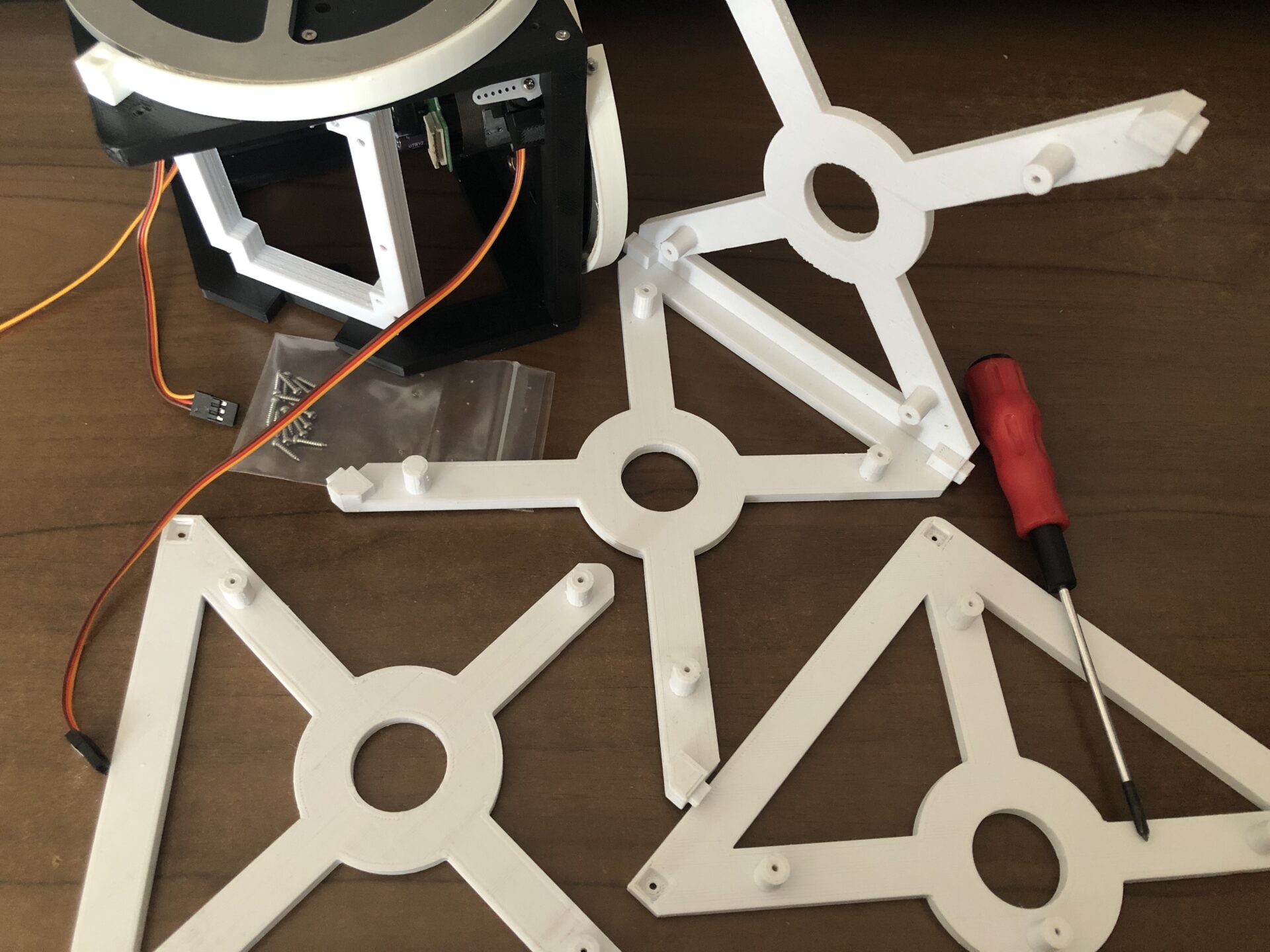
サーボモーター取り付け
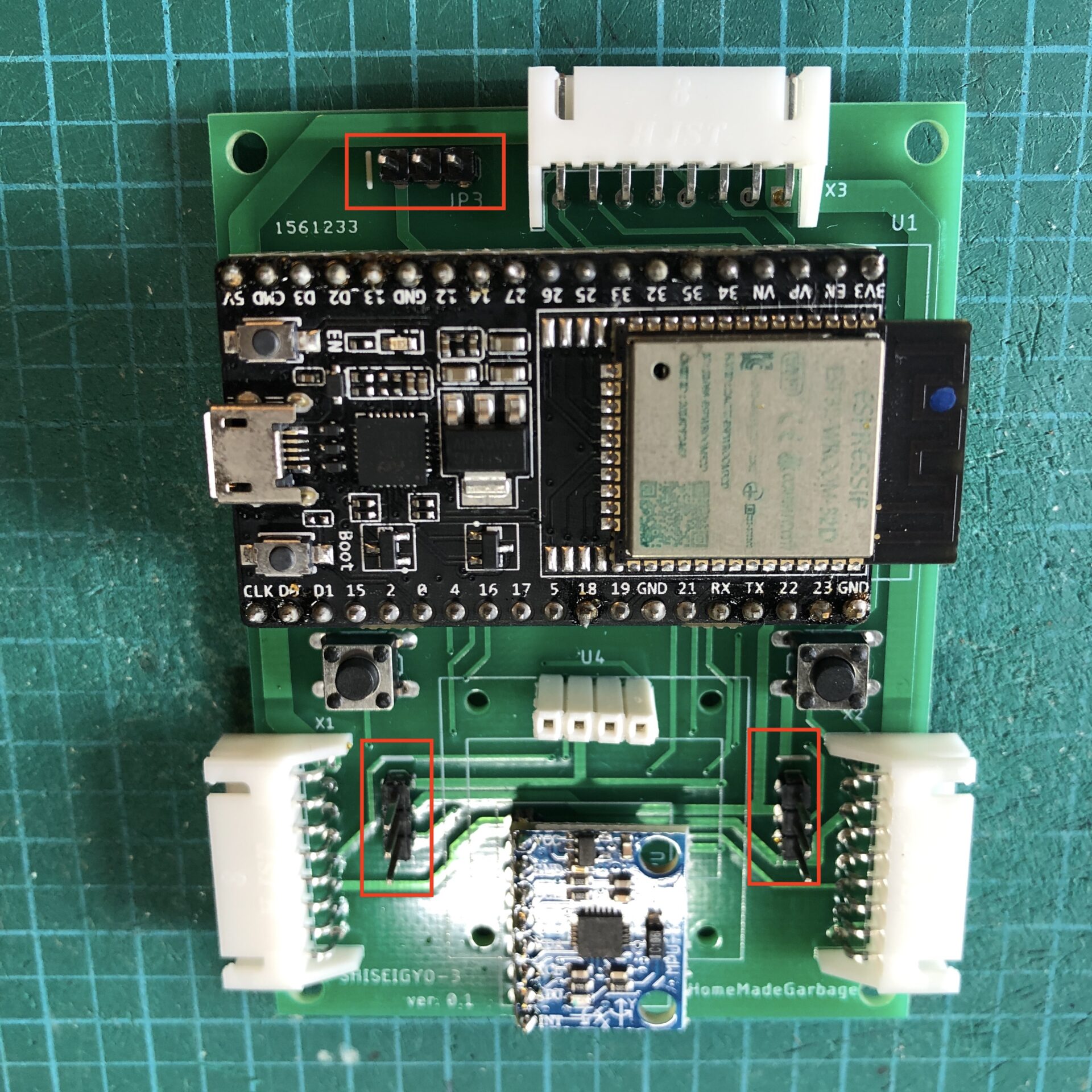
基板の白いラインがある方に
サーボモーターのケーブルの黒い線の方が付く向きで、
取り付けます。
サーボモーターを取り付けました。
ふと、「そもそも”サーボモーター”って何・・?」と思った・・
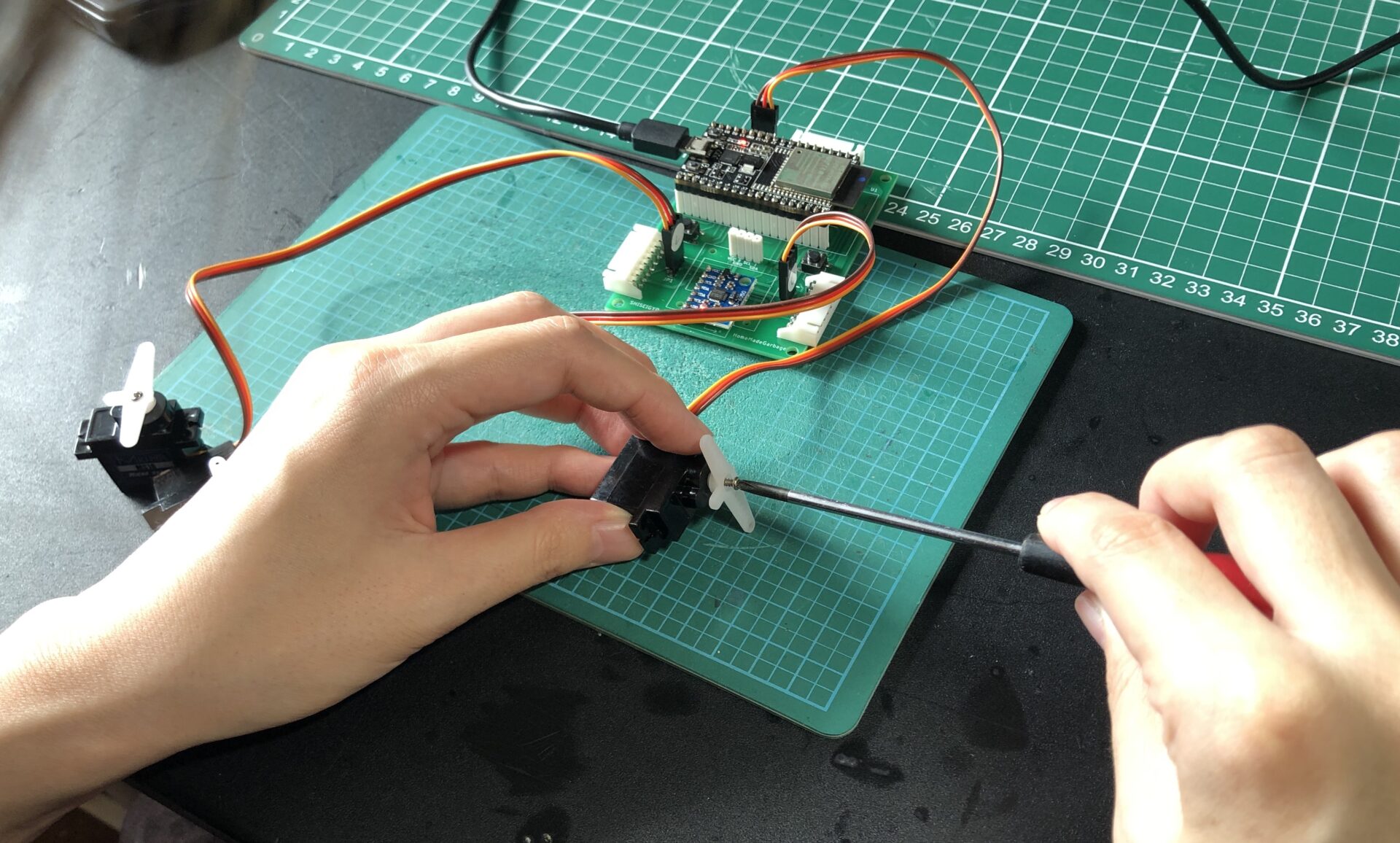
アーム取り付け
アームをねじで取り付けました。
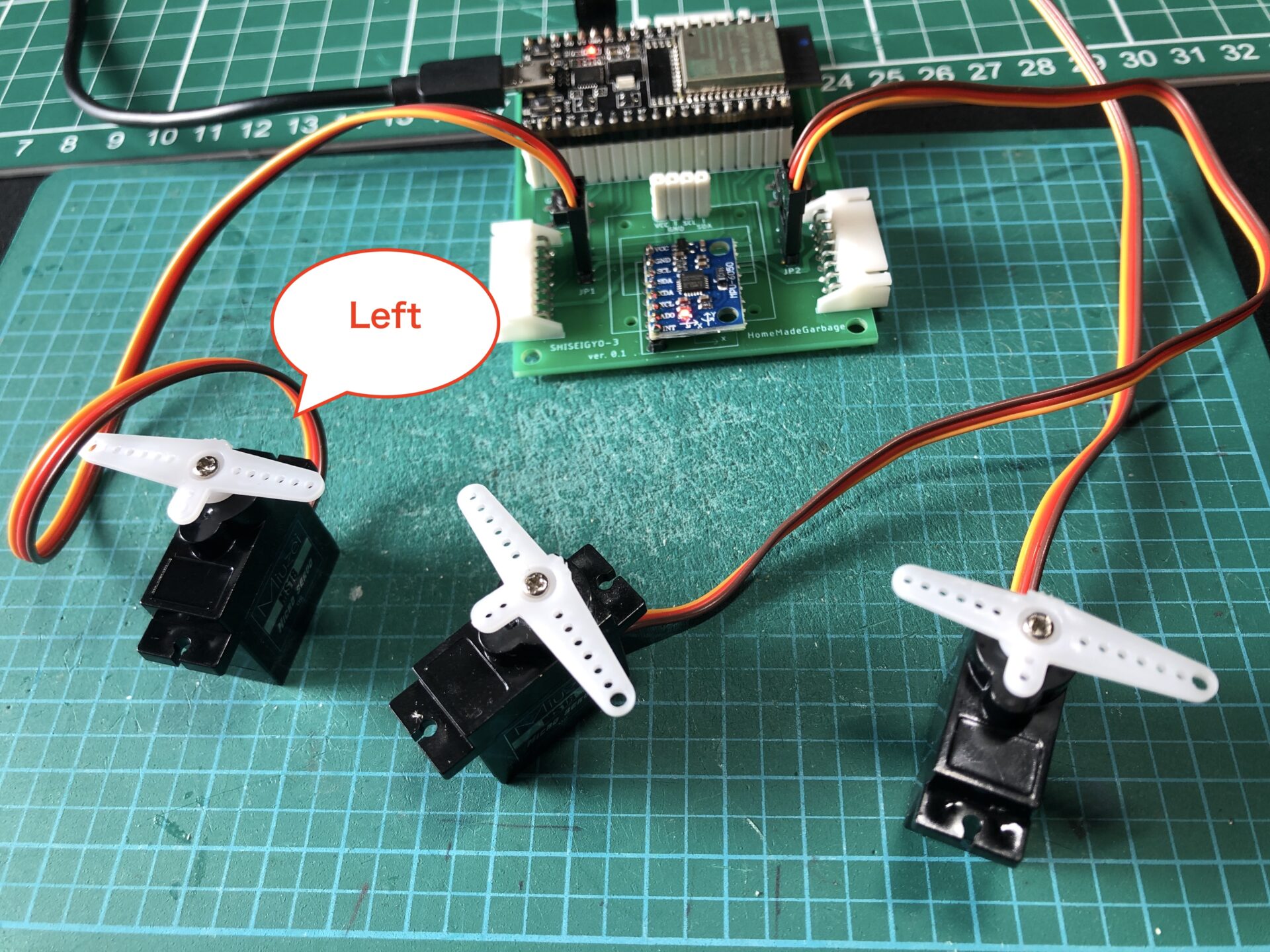
Leftだけ アームの方向が違って、長い方が左側です。
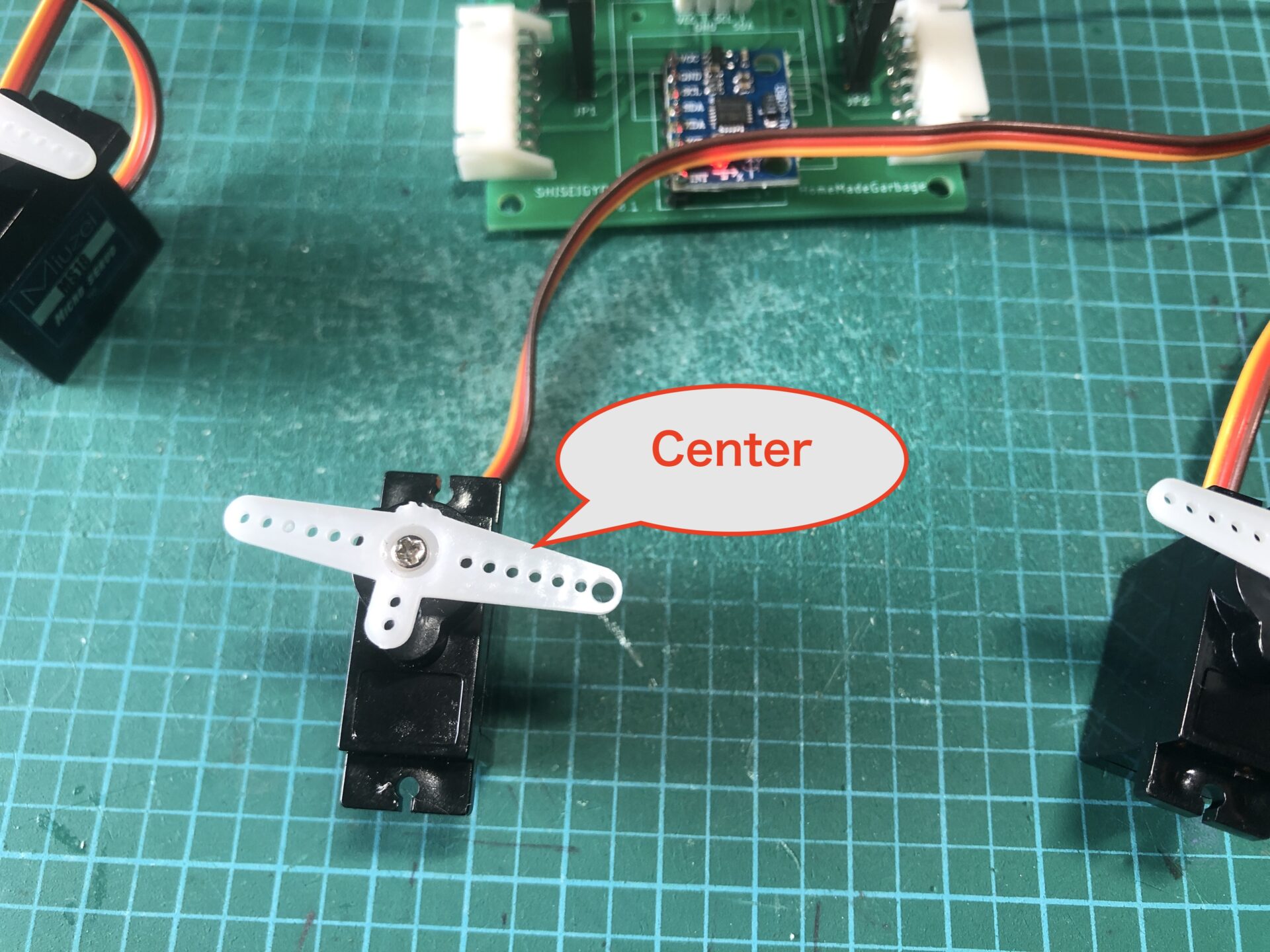
角度調整
差し込んだ時のギアのかみ合わせの影響で
アームが平行になっていないものの角度を調整します。
今回 Left はほぼ並行で、
Center と Right が 少し曲がっていました。
servo_SHISEIGYO-3_01.ino の servoIni 値 (L. 13)を微調整して平行にします。
今回も、環境はお父ちゃんのPCを使用させてもらいました。
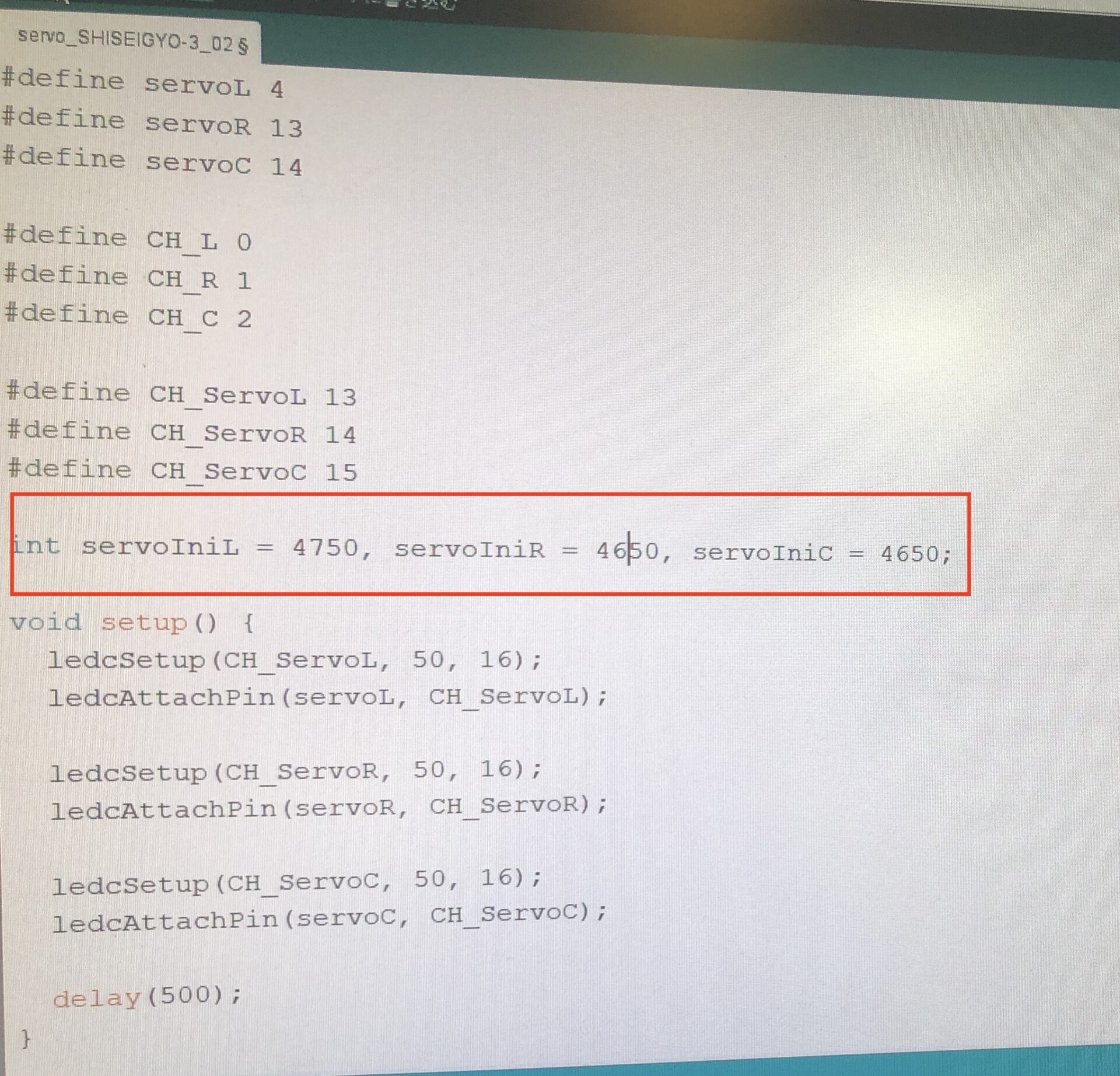
値を増減してどちらに動くかは書き込んでみないとわからなかったので、
最初はとりあえず100減らして、どちらにどの位動くか確認しました。
書き込み完了すると調整したい方向とは逆に動いたので再度調整。

Center の方が角度が大きいので200、
Right は 100 増やして書き込みました。
撮影角度が悪くわかりずらいのですが・・
書き込み完了後に大体真っ直ぐになりました。
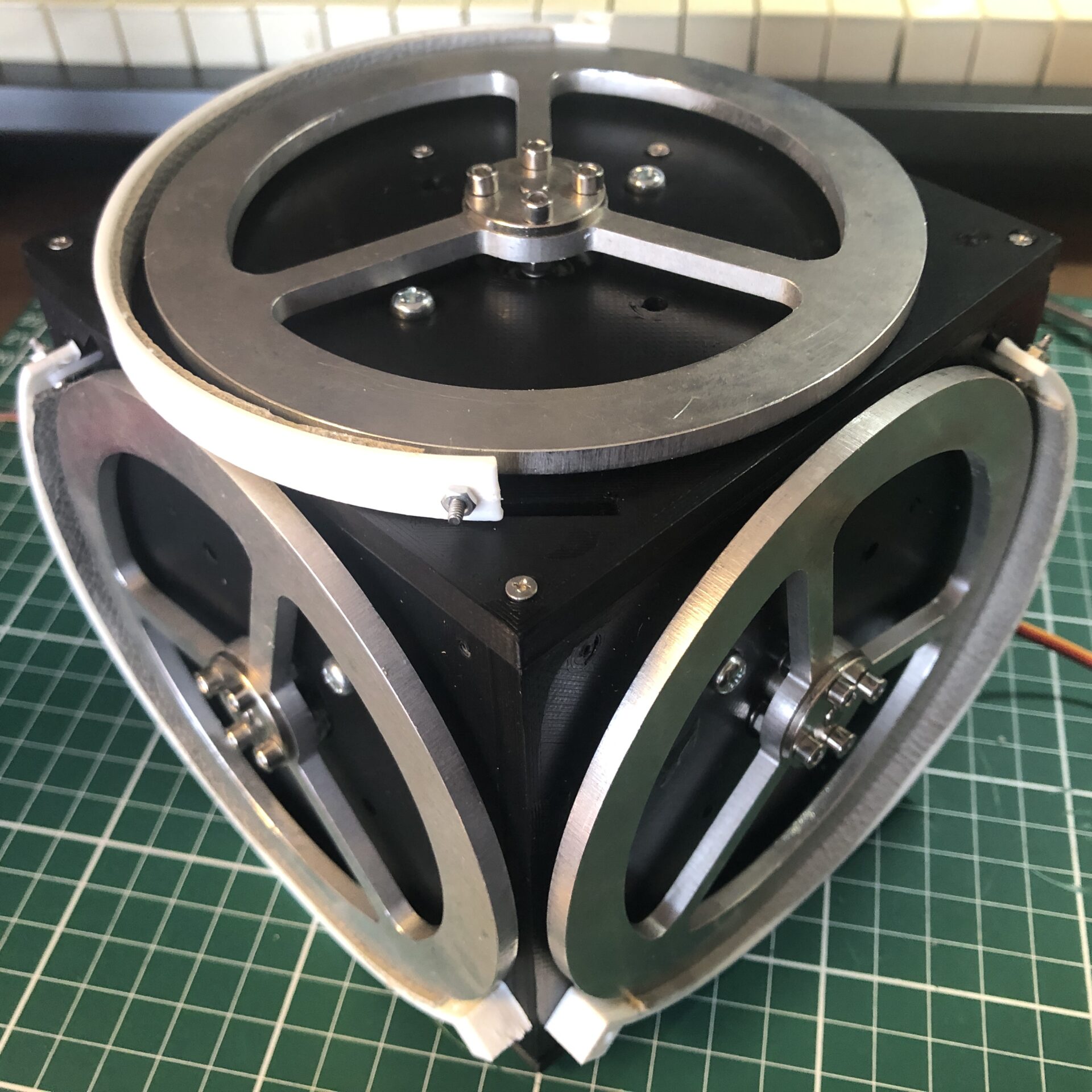
サーボ取り付け&調整完了!
おわりに
こうやってひとつひとつの部品を調整しながら組み立てていると
今まで「動いて当然」だと思っていた身の回りの家電製品などにも
また違った見方になってくるなぁ〜と思いました。
次回はディスプレイと電源コードの取り付けをします。

関連記事
 電子工作初心者 お母ちゃんの SHISEIGYO-3 への道① 初めてのはんだ付け
電子工作初心者 お母ちゃんの SHISEIGYO-3 への道① 初めてのはんだ付け
 電子工作初心者 お母ちゃんの SHISEIGYO-3 への道② はんだ付け
電子工作初心者 お母ちゃんの SHISEIGYO-3 への道② はんだ付け
 電子工作初心者 お母ちゃんの SHISEIGYO-3 への道 ⑤制御基板の起動確認
電子工作初心者 お母ちゃんの SHISEIGYO-3 への道 ⑤制御基板の起動確認
 電子工作初心者 お母ちゃんの SHISEIGYO-3 への道 ⑥モーター接続ケーブルの作成
電子工作初心者 お母ちゃんの SHISEIGYO-3 への道 ⑥モーター接続ケーブルの作成
 電子工作初心者 お母ちゃんの SHISEIGYO-3 への道⑦筐体(内側)の組み立て
電子工作初心者 お母ちゃんの SHISEIGYO-3 への道⑦筐体(内側)の組み立て
 電子工作初心者 お母ちゃんの SHISEIGYO-3 への道⑧ブレーキ&ホイール取り付け
電子工作初心者 お母ちゃんの SHISEIGYO-3 への道⑧ブレーキ&ホイール取り付け
 電子工作初心者 お母ちゃんの SHISEIGYO-3 への道⑨組み立て完成!
電子工作初心者 お母ちゃんの SHISEIGYO-3 への道⑨組み立て完成!
 電子工作初心者 お母ちゃんの SHISEIGYO-3 への道⑩起き上がり動作確認・・完成!
電子工作初心者 お母ちゃんの SHISEIGYO-3 への道⑩起き上がり動作確認・・完成!