
姿勢制御モジュール 4重倒立挑戦 ーリアクションホイールへの道45ー
前回は ミニ四駆用の小型モータを用いた姿勢制御モジュール (SHISEIGYO-1 DC) の実現を報告させていただきました。
以前、姿勢制御モジュールの3重倒立に挑戦いたしました。
せっかく小型モジュールのSHISEIGYO-1 DCが完成しましたので
更に上に積んで4重倒立を実現させたく挑戦いたしましたので報告いたします。
目次
SHISEIGYO-1 the END
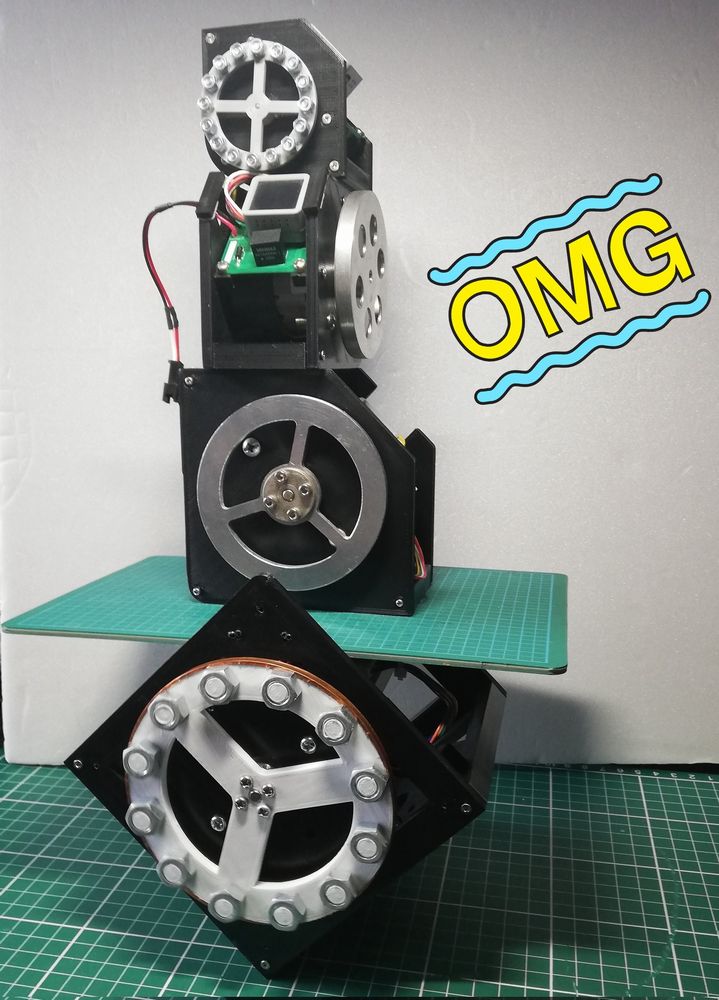
4重倒立を実現するにあたり1番上をSHISEIGYO-1 DC、2番目をSHISEIGYO-1 Jr. 、3番目をSHISEIGYO-1とします。
そうしますと1番下のモジュールには上記の3台が載ることになりますので、力強い機体にする必要がございます。
そこで以前製作した3軸 姿勢制御モジュール SHISEIGYO-3をカスタマイズしてパワフルな1軸 姿勢制御モジュール SHISEIGYO-1 the ENDを製作しました。
SHISEIGYO-1 the END 爆誕
強い
ただSHISEIGYO-3の内筐体つこて1軸にしただけだけど
強い#リアクションホイールへの道 pic.twitter.com/vdrq95RnWm— HomeMadeGarbage (@H0meMadeGarbage) October 22, 2021
SHISEIGYO-1 DC
SHISEIGYO-1 Jr.
SHISEIGYO-1
SHISEIGYO-1 the END pic.twitter.com/bv9SB2NrF0— HomeMadeGarbage (@H0meMadeGarbage) October 22, 2021
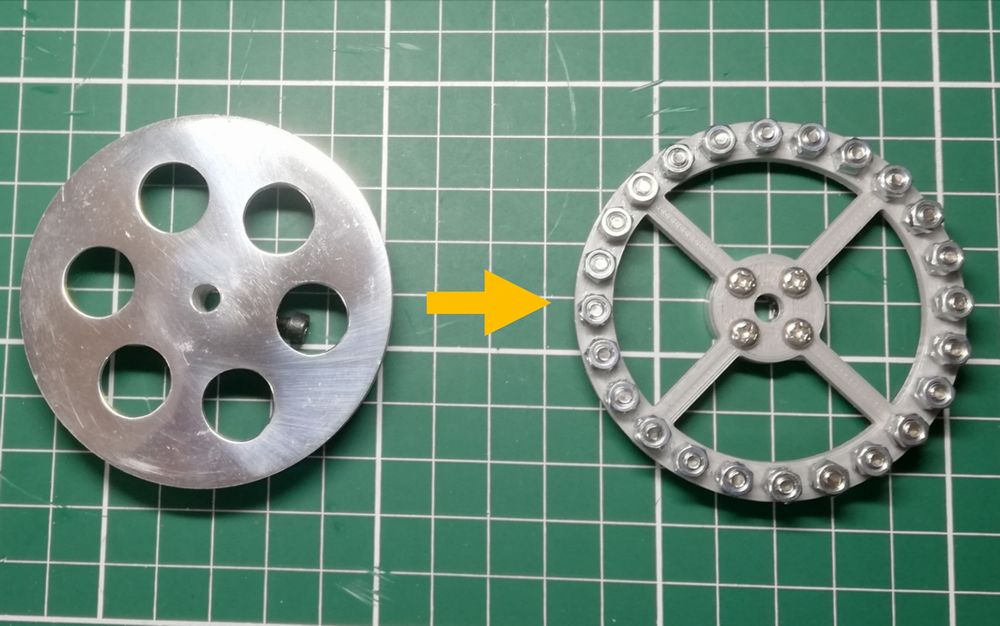
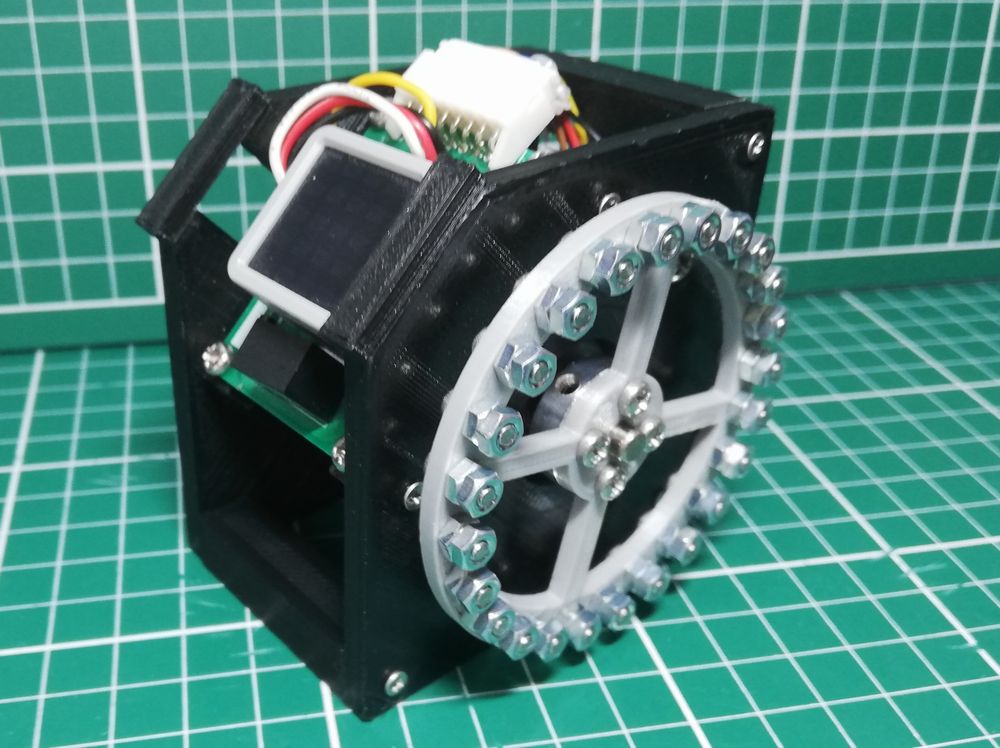
最終的にSHISEIGYO-1 the END のホイールは3Dプリントしナットでトルクを増強したモノを採用しました。
4重倒立 1st トライ
史上初!? おったまげ 4段倒立 挑戦生配信
切り抜き①SHISEIGYO-1 DCとSHISEIGYO-1 Jr.による2重倒立動作確認 pic.twitter.com/KT7pehpv5C
— HomeMadeGarbage (@H0meMadeGarbage) October 28, 2021
史上初!? おったまげ 4段倒立 挑戦生配信
切り抜き②SHISEIGYO-1 DCとSHISEIGYO-1 Jr.、SHISEIGYO-1 the ENDによる3重倒立動作確認 pic.twitter.com/CO8RtkucMf
— HomeMadeGarbage (@H0meMadeGarbage) October 28, 2021
史上初!? おったまげ 4段倒立 挑戦生配信
切り抜き③SHISEIGYO-1 Jr.とSHISEIGYO-1、SHISEIGYO-1 the ENDによる3重倒立が全くうまくいかない pic.twitter.com/SNXi18UYkt
— HomeMadeGarbage (@H0meMadeGarbage) October 28, 2021
史上初!? おったまげ 4段倒立 挑戦生配信
切り抜き④絶望のため息 pic.twitter.com/r8Yi8gz0bw
— HomeMadeGarbage (@H0meMadeGarbage) October 28, 2021
史上初!? おったまげ 4段倒立 挑戦生配信
切り抜き⑤SHISEIGYO-1とSHISEIGYO-1 the ENDの積み上げがどうもうまくいかない。
絶望の中の考察 pic.twitter.com/52N6VWoJog
— HomeMadeGarbage (@H0meMadeGarbage) October 28, 2021
史上初!? おったまげ 4段倒立 挑戦生配信
切り抜き⑥SHISEIGYO-1 DCとSHISEIGYO-1 Jr.、SHISEIGYO-1による3重倒立はそれなりにできるようになった。 pic.twitter.com/Q01Hamxr2Z
— HomeMadeGarbage (@H0meMadeGarbage) October 28, 2021
1st トライでの課題
- SHISEIGYO-1 the END の底面が直角すぎて滑りやすい
- SHISEIGYO-1のホイールトルクが弱い
- SHISEIGYO-1 Jr.の底面が滑りやすく安定しない
4重倒立 2nd トライ
1stトライの課題を受けて改善を施して2ndトライに挑みました。
史上初!? おったまげ 4段倒立 挑戦生配信 2
切り抜き①前回からの改善点 解説 pic.twitter.com/Sjs2Ps8jOI
— HomeMadeGarbage (@H0meMadeGarbage) October 30, 2021
1st トライによる課題を改善したことによって3重倒立は比較的容易にできるようになりました。
史上初!? おったまげ 4段倒立 挑戦生配信 2
切り抜き③3重倒立 その2
お滑りとの戦い 序章 pic.twitter.com/WyPNefdphS— HomeMadeGarbage (@H0meMadeGarbage) October 30, 2021
いよいよ4重倒立に挑戦
史上初!? おったまげ 4段倒立 挑戦生配信 2
切り抜き⑤4重倒立の心をつかみかける pic.twitter.com/nXr0tYev9o
— HomeMadeGarbage (@H0meMadeGarbage) October 30, 2021
2nd トライでの課題
史上初!? おったまげ 4段倒立 挑戦生配信 3
切り抜き涙のため息配信
今回の課題
・SHISEIGYO-1 DCのモータ固定部 補強
・SHISEIGYO-1 Jr.のホイール トルク増強 pic.twitter.com/HJGtSO0rYl— HomeMadeGarbage (@H0meMadeGarbage) October 30, 2021
4重倒立 3rd トライ
改善を施し再トライ!
SHISEIGYO-1 DCのモータ固定部 補強
落ちたりひっくり返ったりでモータ固定部が壊れやすかったので強化しました。 pic.twitter.com/boDWnnPXQU
— HomeMadeGarbage (@H0meMadeGarbage) October 30, 2021
SHISEIGYO-1 Jr.のホイール トルク増強 市販のホイール (26g) から自作ホイール (39g) に変えて
倒立の胆力増加を目指しました。
遂に達成!
遂に4重倒立達成!! pic.twitter.com/vf5ThYoN6w
— HomeMadeGarbage (@H0meMadeGarbage) October 31, 2021
おわりに
小型 1軸 姿勢制御モジュール SHISEGYO-1 DCを用いることによって、ついに4重倒立が実現できました。
多重倒立の総括といいますかコツといいますか
エッセンスみたいなものをまとめますと現状以下のようになるかなと
- ホイールトルク増強
上段にモジュールを積んで負荷が増すのでホイールはその負荷に耐えうるトルクが必要となります。
1番上のSHISEIGYO-1 DC以外のモジュールは全て当初のホイールよりトルクを大きくカスタマイズしました。 -
各姿勢制御モジュールの回転は極力抑えて、柔軟に左右の振動に応答させる
倒立時の回転抑制には独自技術の倒立角動的再調整システム IDRS (Inverted angle Dynamic Readjustment System) を施して対応した。 - 支点の滑りの抑制
IDRSによって倒立時の回転が低減されるとホイールは左右交互の回転になり、支点に負荷がかかり滑りやすくなる。
モジュールの底面や間に挟む板を滑りにくくする工夫が必要であった。
IDRSの詳細は以下の通りです。
これらを踏まえ さらに磨きをかけて恒久的な4重倒立を目指したいと思います。
次の記事
関連記事
 DCモータで姿勢制御 SHISEIGYO-1 DC 爆誕 ーリアクションホイールへの道43ー
DCモータで姿勢制御 SHISEIGYO-1 DC 爆誕 ーリアクションホイールへの道43ー
 SHISEIGYO-1 DC の改善検討 ーリアクションホイールへの道44ー
SHISEIGYO-1 DC の改善検討 ーリアクションホイールへの道44ー
 SHISEIGYO-1 DC の現状と今後 ーリアクションホイールへの道46ー
SHISEIGYO-1 DC の現状と今後 ーリアクションホイールへの道46ー
 SHISEIGYO-1 DC 完成! ーリアクションホイールへの道47ー
SHISEIGYO-1 DC 完成! ーリアクションホイールへの道47ー
 姿勢制御モジュール 4重倒立挑戦2 ーリアクションホイールへの道48ー
姿勢制御モジュール 4重倒立挑戦2 ーリアクションホイールへの道48ー
 姿勢制御モジュール 4重倒立挑戦3 ーリアクションホイールへの道49ー
姿勢制御モジュール 4重倒立挑戦3 ーリアクションホイールへの道49ー
 姿勢制御装置とバーサライタの融合 ーリアクションホイールへの道50ー
姿勢制御装置とバーサライタの融合 ーリアクションホイールへの道50ー
 姿勢制御装置とバーサライタの融合2 ーリアクションホイールへの道51ー
姿勢制御装置とバーサライタの融合2 ーリアクションホイールへの道51ー