二足歩行ロボット SHISEIGYO-2 Walker 改 の検討2
本記事にはアフィリエイト広告が含まれます。
前回は2軸のフライホイールによるバランスで倒立する2足歩行ロボット “SHISEIGYO-2 Walker 改” の実現に向けて足の製作を実施しました。
ここでは製作した足を実装して歩行動作を確認します。
目次
足の実装
前回製作した足を2軸のホイール部に接続します。
以下は脚の動作確認のために平らな足先をつけて歩行させています。
これで成立してるな。。。 pic.twitter.com/BLYl7SH5ms
— HomeMadeGarbage (@H0meMadeGarbage) March 21, 2023
問題なく歩行できていますね。。
しかしここでの目的はリアクションホイールによって倒立して歩行や旋回動作をさせることです。
倒立用の足先を製作
新しいクックできた pic.twitter.com/mM0T4CzDXT
— HomeMadeGarbage (@H0meMadeGarbage) March 21, 2023
製作した足先によって点倒立動作を確認できました!
立った。立った。水の上。 pic.twitter.com/ke0IYGVIAB
— HomeMadeGarbage (@H0meMadeGarbage) March 21, 2023
歩行・旋回動作
歩行動作確認。ちょこちょこバランスをとって歩いていますww
旋回動作は片方を支点に他方で地面をかいて実行します。
旋回動作確認
電源線ジャマなのではやくコードレス化しないと pic.twitter.com/M7K1WkfaUh— HomeMadeGarbage (@H0meMadeGarbage) March 21, 2023
ちょっと電源コードが邪魔ですが旋回動作も確認できました!!
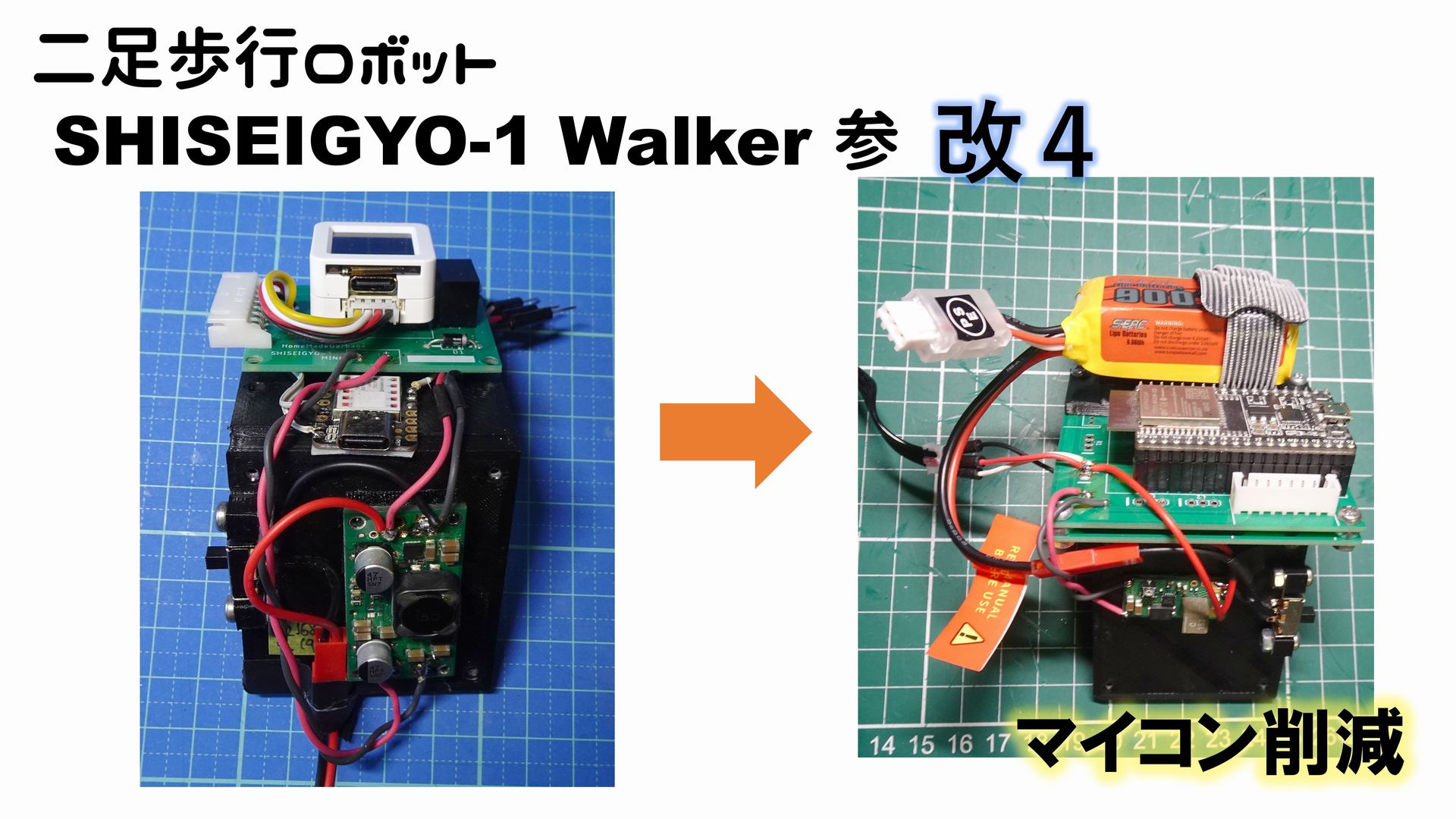
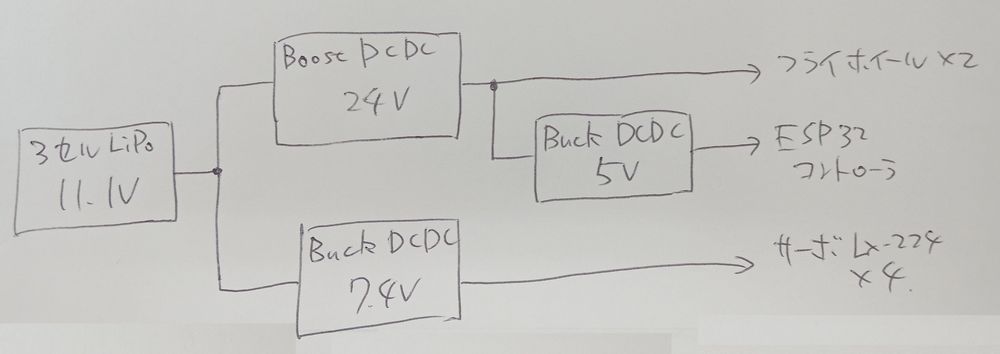
電源システム
これまでは電源を外部から供給していましたが内蔵してコードレス化をはかります。
電源システムは以下のようにしました。
私の電源システム pic.twitter.com/ZITXh9S1gC
— HomeMadeGarbage (@H0meMadeGarbage) March 22, 2023
動作
電源がコードレス化されて旋回もスムーズになりました。
電源線から解放されてうれしそう pic.twitter.com/5ulF5FyQrP
— HomeMadeGarbage (@H0meMadeGarbage) March 22, 2023
歩行動作を堪能
まだ調整は必要みたい pic.twitter.com/nCfgvLPpNY
— HomeMadeGarbage (@H0meMadeGarbage) March 22, 2023
ホイールの制御パラメータを最適化
頑張ってモチョモチョ動いております。
おわりに
ここでは2軸のフライホイールでのバランスによる二足歩行ロボットの歩行動作の確認を実施しました。
実現したかった旋回動作も確認できて満足です。
課題としましては
- 足の機械強度向上
3Dプリンタで平行リンクの機構を構成しているので若干強度が足りず歪みが発生
前後進の経路が歪む。。どこかで金属部品で試したい
- 足が短すぎる
ホイール用にブラシレスモータを2個実装しており重量もあるので、足の長さを短くせざるを得なかった。
いずれよりパワーのあるモータで高トルクのホイールを回して再挑戦したい
- 足をスリムにしたい
サーボのサイズが大きいため足がゴツくなってしまった。足自体の長さがないためより強調される。
高額になってしまうが小型で大きいトルクのサーボモータでの足製作検討もしてみたい
以上のようにかなり課題は多いですが原理動作はバッチリ確認できました。
旋回動作させるには2軸ホイールバランスが必須であることが体感として理解できたことは大きいです。
フライホイールによるバランスを採用することによって足の機構を単純化でき、またその歩行の様子も独創的であると感じております。
この方向性でどんどん開発を進めていく所存です。