二足歩行ロボット SHISEIGYO-2 Walker 改 のヒザ改修
本記事にはアフィリエイト広告が含まれます。
以前製作した二足歩行ロボット SHISEIGYO-2 Walker 改 ですが、
関節がイジっているうちにグニャグニャになり うまく歩けなくなってしまいました。
右足内側奥の関節がグニャグニャでうまく歩けなくなった。
強度必要な個所は金属にするべきかも pic.twitter.com/4fHXoEsQCf— HomeMadeGarbage (@H0meMadeGarbage) June 27, 2023
目次
ヒザ改修
SHISEIGYO-2 Walker 改 はサーボモータ2個をリンク機構で接続して片足を構成しています。
このグニャグニャのヒザどうにかするか pic.twitter.com/Mp8GFznnc2
— HomeMadeGarbage (@H0meMadeGarbage) August 6, 2023
接続部はネジと3Dプリント品のみで作っているので強度は高くなく使っているうちに更にひどくなっていきました。。
膝サポーター
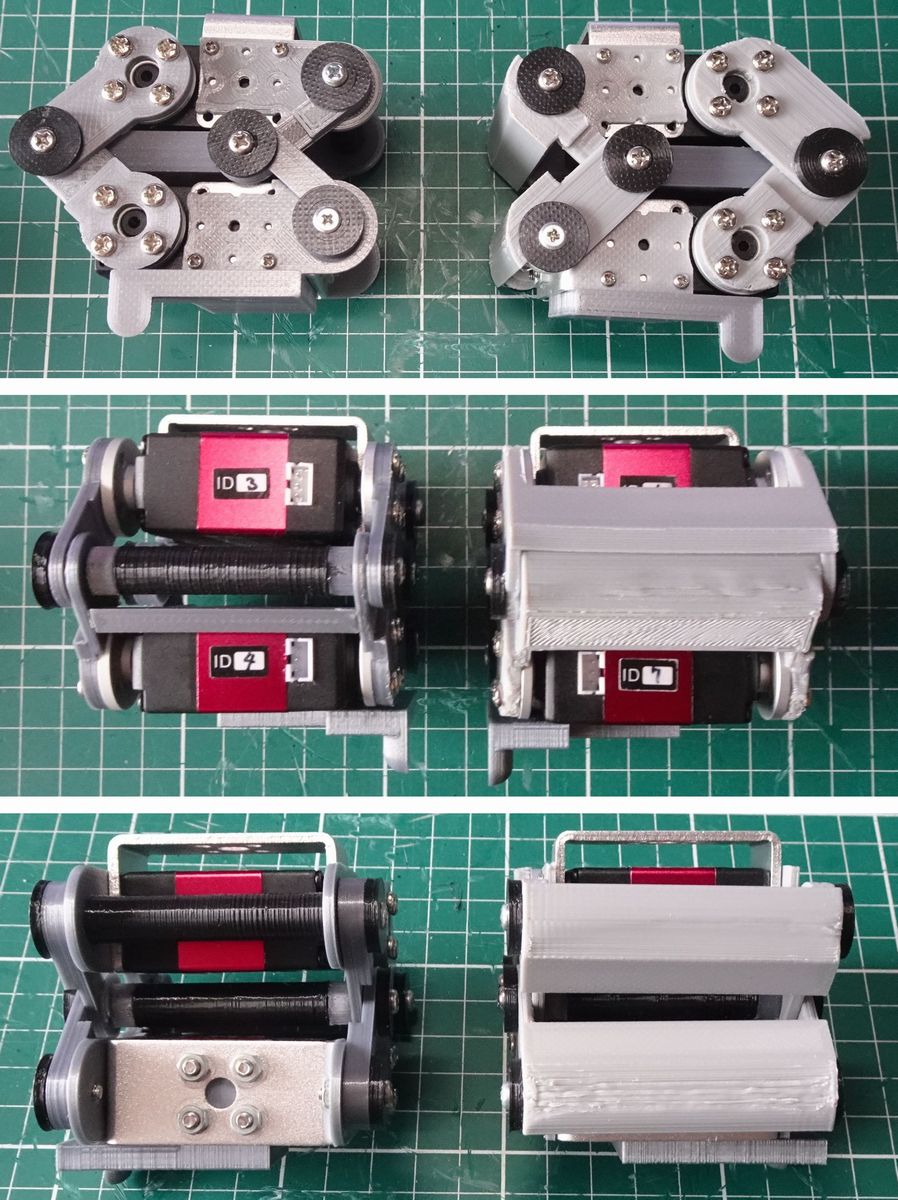
高さを低くするために関節部が左右で分断されているのが問題であると考え、ヒザ部のパーツを前後方向のスペースを活用して極力一体化するような構成を試してみました。
とりあえずヒザ裏のパーツを左右一体化してみた。
分断してた左右のパーツを連結
とりあえずヒザ裏だけに施した。
ヒザ裏サポーターいい感じなので前面にも施す pic.twitter.com/FBalT3h1Y7
— HomeMadeGarbage (@H0meMadeGarbage) August 6, 2023
なんだかよさげなのでこの方針で関節を強くしていきます。
前面のパーツも左右一体化して、サポートを強化しました。

片足を改修して動かしてみましたが、まだ動作はイマイチですねぇ
もひとつだな
でもマッシブでかっこよくなった pic.twitter.com/itotHNtNGI— HomeMadeGarbage (@H0meMadeGarbage) August 7, 2023
後ろのサポーターをさらに手厚くしてみました。
獲れました獲れました pic.twitter.com/clCfayYIQ4
— HomeMadeGarbage (@H0meMadeGarbage) August 7, 2023
うん。いい感じ!

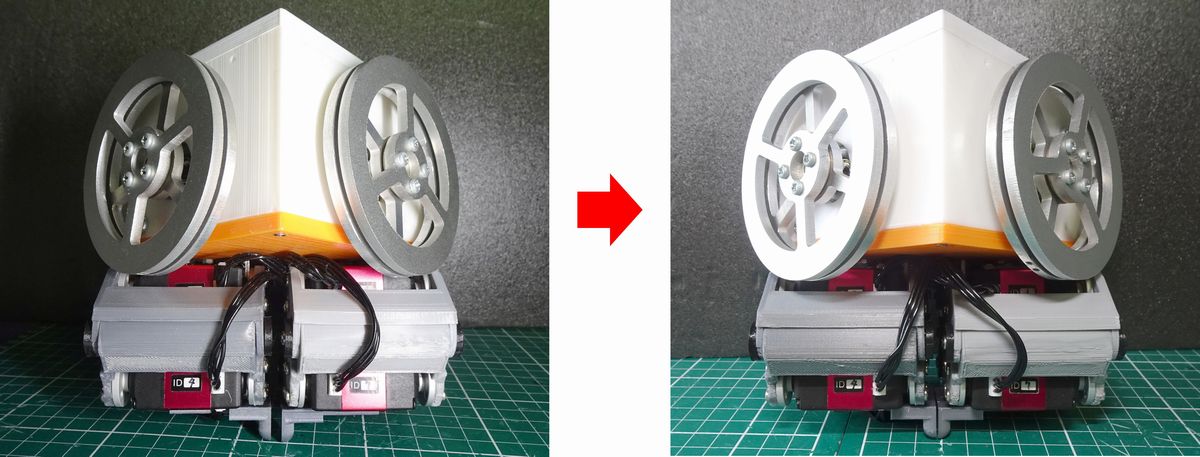
足の改修
左が改修前、右が改修後です。
強度も向上しましたし見た目もマッシブでかっこよくなりました。
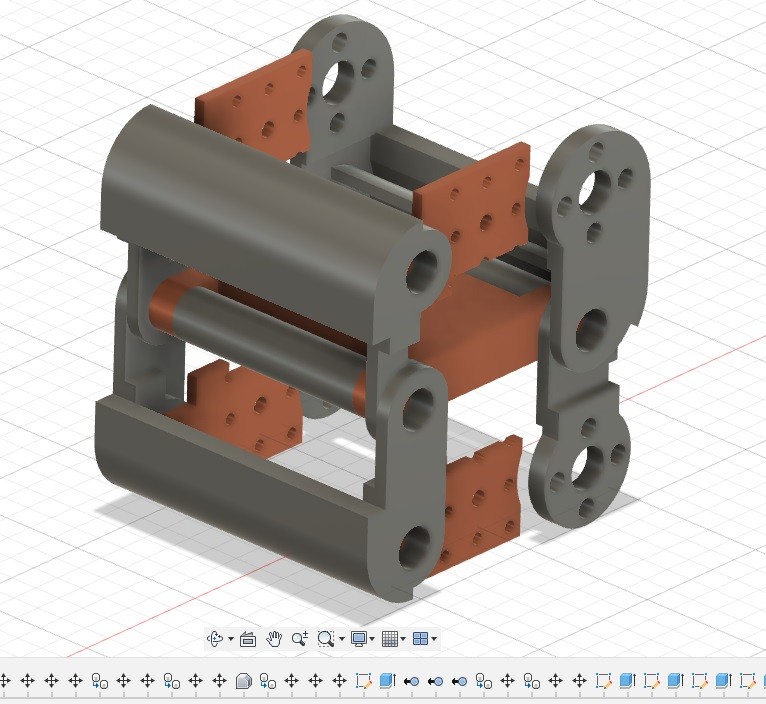
↓Fusion360での設計画面
動作もグニャグニャしてない!
できた
膝サポーターでガチガチに固めた pic.twitter.com/pQsI39NsIW— HomeMadeGarbage (@H0meMadeGarbage) August 7, 2023
但しグニャグニャが改善したために足先の間が広くなってしまいましたので、靴をプリントしなおして足先の間を詰めました。
歩行動作
元気に歩行!
おわりに
ここでは二足歩行ロボット SHISEIGYO-2 Walker 改 の膝関節の強化を実施しました。
しばらくイジってみて様子を見てみようと思います。
理想はパーツを金属にすることだと思うのでいつかは金属加工品にも触れてみたいです。
それではまた
追記
足調整 (2023/8/9)
足のサーボの駆動側を外側にしていたので (なんでそうしてたんだろ? 🙄 )、両足共に内側になるように変更しました。
それに伴って足の付け根の位置や靴先の位置を調整。
いい感じ。
旋回動作も若干動作フローを調整しました。
これでしばらく様子見て、機体の強度を確認していきたいと思います。

よちよち歩きかかわいいですね!