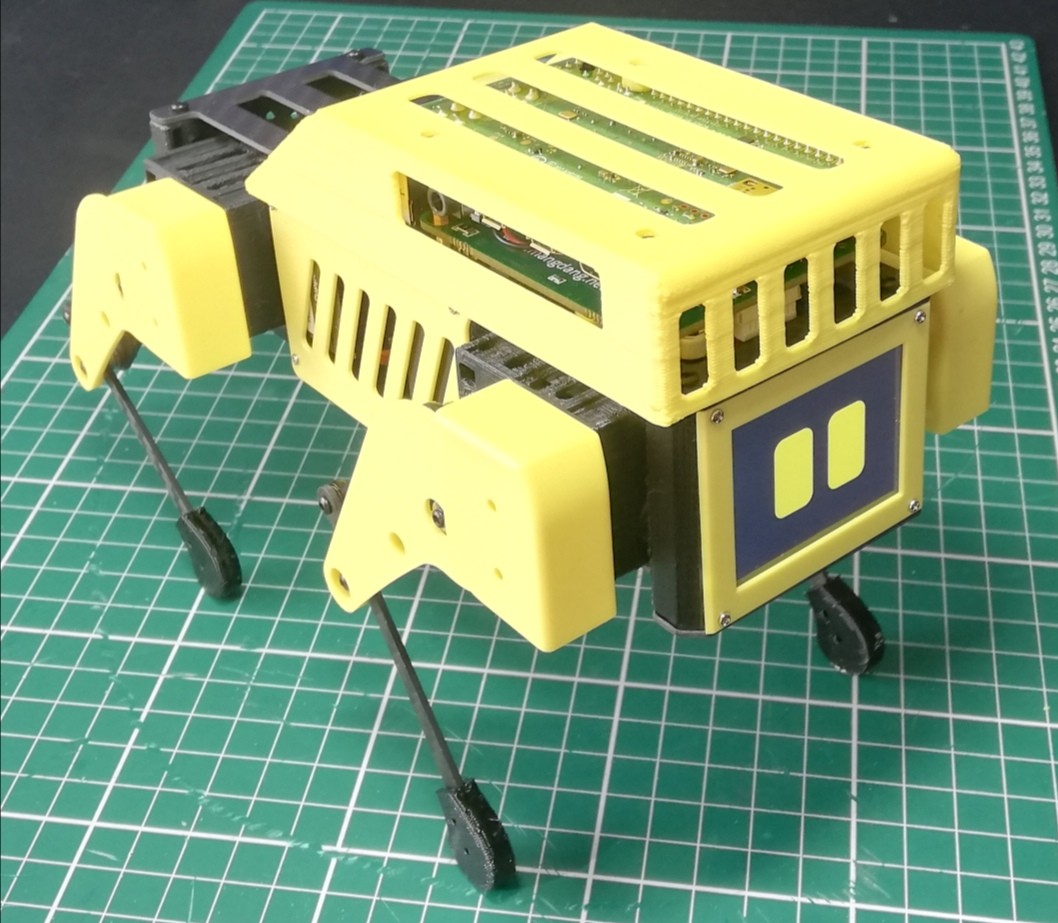
AIロボット犬『XGO-lite2』をプログラミングで味わう
本記事にはアフィリエイト広告が含まれます。
前回はいただいた XGO-lite2 の基本動作を楽しみました。
ここではプログラミングで思いの通りにXGO-lite2 を動かしてみたいと思います。
XGO2 は Makuakeクラウドファンディングにて2023年の7月21日から9月8日まで予約販売中です。

ここでのXGO-lite2のOSバージョンは”XGO0627″でした。
目次
XGO-Blockly
XGO2のプログラミング方法は各種あるようですがここでは、scratchのようにブロックをつなげてプログラミングする XGO-Blockly を用います。
XGO-Blockly の使用方法は以下の通りです。
https://www.yuque.com/luwudynamics/jp/nc9elsgy0hgy4rig
XGO-lite2 を起動してプログラムモードにします。
PCのFirefoxブラウザで http://47.252.22.82:8088/ にアクセスして”XGO-CM4″を選択します。
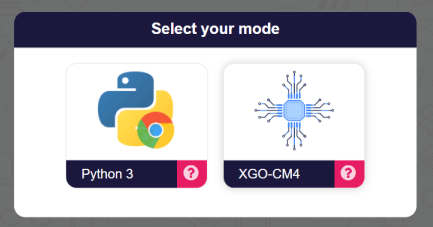
XGO-lite2 のディスプレイに表示されているIPアドレスを入力すると、ブラウザとXGO2が接続してプログラミングが可能になります。
使用するブラウザは Firefox である必要があります。chromeなどではプログラムを実行することができませんでした。
XGO-Blockly については以下のページも参考にしました。
https://www.yuque.com/luwudynamics/en/gbbgpv4msoym8lwl
いざプログラミング
まずはお題として4足歩行ロボットで絶対にやりたい、床の傾きに追従して足を動かして機体を水平に保つ例のヤツを選択しました。
簡単にできました。
宴会芸
これやらなきゃ 始まらないでしょ#XGO2 #Robotics pic.twitter.com/0JmyPvwTpn— HomeMadeGarbage (@H0meMadeGarbage) July 21, 2023
IMUの値で足高さを制御して…などとブロックでやろうと考えていたのですが、この動作自体が一つのブロックで用意されていました。超簡単。
↓これだけでできた。
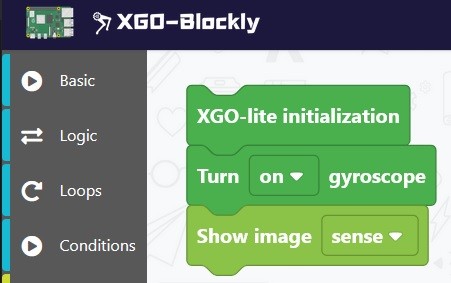
3つ目のブロックはディスプレイに表示する顔を選択するブロック。
サーボ制御
次こそはサーボを制御しての所望の動作プログラミングを目指します。
サーボ制御ブロックとしてはおおまかに、足やアームの先端の座標を指定するブロックとサーボ1個の角度を指定するブロックの2種類がありました。
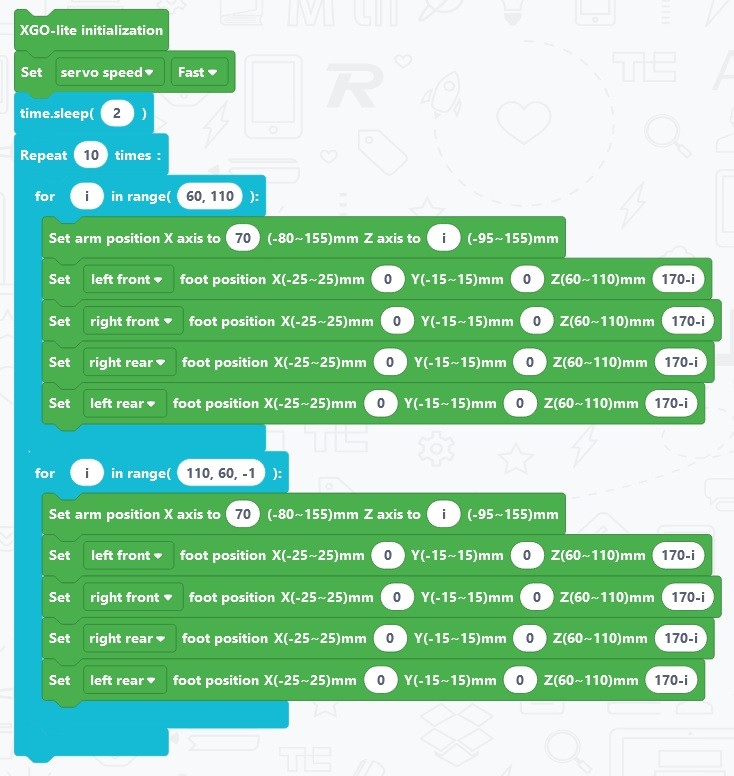
座標指定
まずは足やアームの座標を指定するブロックでの動作を楽しみました。
XGO-lite2 サーボもりもり動かす#XGO2 #Robotics pic.twitter.com/n6wtZSJNpj
— HomeMadeGarbage (@H0meMadeGarbage) July 22, 2023
足の高さを指定して下げた分、アームの高さを上げてアーム先端の位置を保持する動作です。面白い。
ブロックは以下の通り。座標指定は非常に便利。
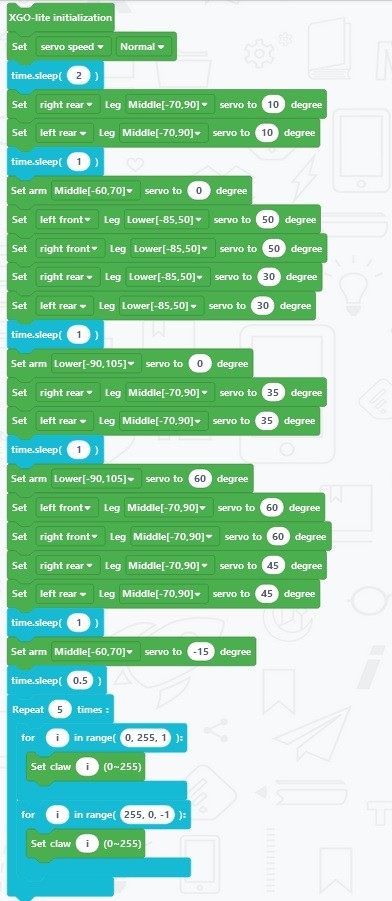
サーボ角度指定
次に個々のサーボの角度を指定して動作させます。
XGO-lite2 Evolution#XGO2 #Robotics pic.twitter.com/qmR6pdKa9e
— HomeMadeGarbage (@H0meMadeGarbage) July 22, 2023
立ちました。
サーボ追従 (2023/7/23 追記)
前足のサーボ角度を取得して後ろ足を動かしました。
ロボットは人間にあたえられた命令に服従しなければならない。#XGO2 #Robotics pic.twitter.com/PgQwJPTykq
— HomeMadeGarbage (@H0meMadeGarbage) July 22, 2023

おわりに
ジャンプ#XGO2 #Robotics pic.twitter.com/fUTWjDhDWZ
— HomeMadeGarbage (@H0meMadeGarbage) July 22, 2023
ここでは XGO-Blockly によるプログラミングを楽しみました。
主にサーボを動かしての運動を試しましたが、マイクやスピーカそしてAI機能のブロックもあるので まだまだ色々楽しめそうです。
XGO-lite2 と私との距離も少しずつ縮まってきております。
更に勉強を深めていきたいです。
それではまた