ロボット犬『Mini Pupperミニぷぱ』を AIカメラ HuskyLens で堪能
本記事にはアフィリエイト広告が含まれます。
前回は9軸 IMUセンサ BNO055を用いてミニぷぱ制御を楽しみました。
ここでは更に AIカメラ HuskyLensを追加して ミニぷぱを賢くしちゃいます。

目次
AIカメラ HuskyLens
HuskyLensは顔認識、物体追跡、物体認識、ライン追跡、色認識、タグ認識などの機能を有するAIカメラです。
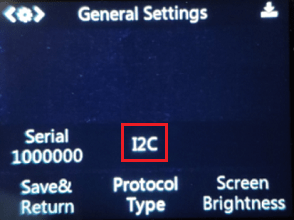
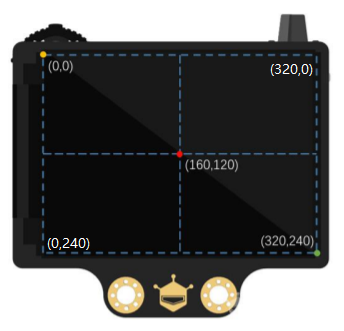
ここではHuskyLensの設定で色認識データをI2C出力にして使用しました。
認識した色の座標位置でミニぷぱを制御します。
HuskyLensをミニぷぱに接続
前回製作したATOM Liteをコントローラに採用したミニぷぱにHuskyLensを接続します。
注意点
HuskyLensのI2C出力をATOM Liteに接続して素直に行きたかったのですが。。
毎度恒例の問題発生。
以下のHuskyLens Arduinoライブラリを使用してI2C通信したいのですが、ESP32には使用できませんでした。
https://github.com/HuskyLens/HUSKYLENSArduino/tree/master/HUSKYLENS/examples/HUSKYLENS_I2C
かなりライブラリを修正しないといけない感じだったので直結は潔くあきらめて、Seeeduino XIAOで中継することにいたしました。
#DFRobot -> #seeed -> #M5Stack
on #MiniPupper pic.twitter.com/NXSAwPqDj6— HomeMadeGarbage (@H0meMadeGarbage) February 19, 2022
構成
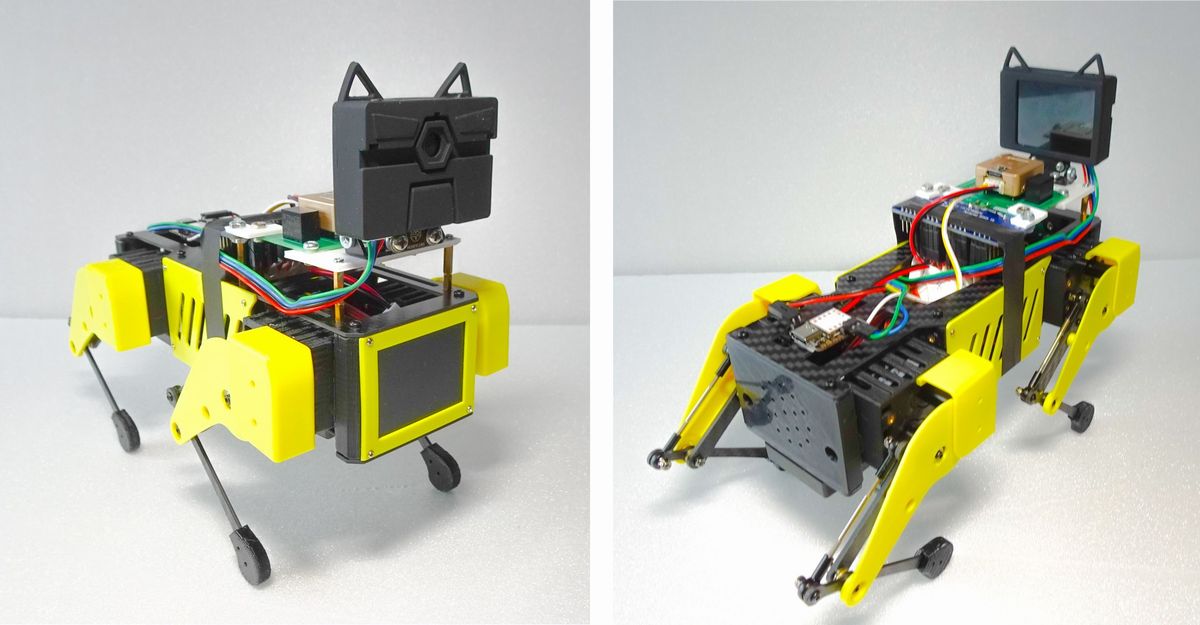
HuskyLensとATOM Lite間にSeeeduino XIAOを挿入してI2C-Uart変換を実施しています。

部品
- ATOM Lite

- HuskyLens
- Seeeduino XIAO
- BNO055
-
PCA9685モジュール
- 5V 降圧DCDC




動作
赤色の横方向座標で旋回移動させてみました。
AIハスキー犬 爆誕#MiniPupper #ミニぷぱ #HuskyLens #DFRobot pic.twitter.com/ZQ598BBzeL
— HomeMadeGarbage (@H0meMadeGarbage) February 19, 2022
XIAOからのHuskyLensデータをATOM Liteを2コアにしてCore0で常時シリアル受信するようにして、サーボ制御との並行動作を実現しています。
これまで仕込んだ歩行動作なども問題なく実行できます。
このあまり可愛くない感じたまらんわ
はやく散歩連れていきたい#MiniPupper #ミニぷぱ #HuskyLens pic.twitter.com/MLMdajjbzu— HomeMadeGarbage (@H0meMadeGarbage) February 19, 2022
おわりに
AIカメラ HuskyLensの追加によって ミニぷぱ がとても賢くなりました!
今回は色認識で制御していますが顔認識やライントレースなどもできそうです。
どんどん賢く 高機能になる 我が家のミニぷぱ
この投稿をInstagramで見る
そのうちしゃべりだして立ち上がって二足歩行するかもしれませんね。