ロボット犬『Mini Pupperミニぷぱ』ESP32で歩行動作検討1
本記事にはアフィリエイト広告が含まれます。
前回はラズパイ4とミニぷぱ専用基板での制御を一旦諦め、邪道ですがESP32での逆運動学による足制御を実施しました。
前回は足1本のみで動作確認しましたが、ここでは足4本を動かして歩行動作を確認しましたので報告いたします。
目次
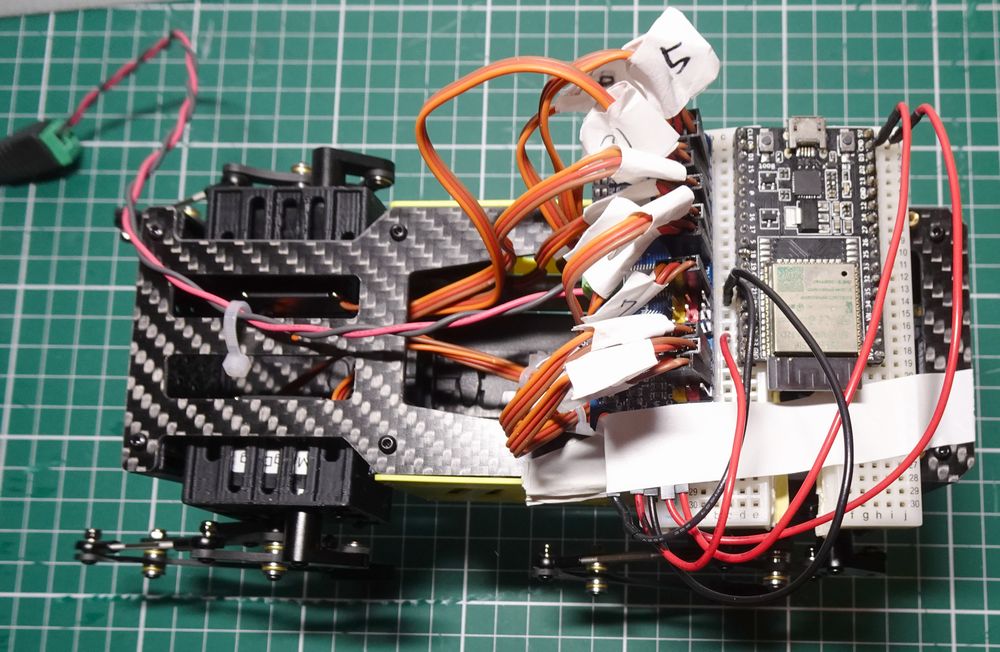
ESP32で4本足制御
12個のサーボをPCA9685モジュールに接続してESP32で制御します。

相変わらずのブレッドボードww
電源は5V ACアダプタで供給
部品
- ESP32 開発ボード
- PCA9685モジュール

動作
前回同様にBlynkアプリで足の位置をスマホで指定してBLE通信でサーボを制御しています。
だいぶ ぷぱぷぱ してきた #MiniPupper #ミニぷぱ #Blynk #ESP32 pic.twitter.com/iXgBqdx9zy
— HomeMadeGarbage (@H0meMadeGarbage) February 10, 2022
これで遂に4本の足を自由自在に動かすことができるようになりました。
歩行動作検討
正規のミニぷぱの歩行動作を参考にしつつ4足歩行を実現させます。
足踏み
足踏みは対角の足を交互に上げ下げすることで実現できました。
足踏み ぷぱぷぱ#MiniPupper #ミニぷぱ #Blynk #ESP32 pic.twitter.com/vA3BbeHPkC
— HomeMadeGarbage (@H0meMadeGarbage) February 11, 2022
前進後進
足踏みを応用して、対角の足2本を上げている間に接地している足を後ろ(もしくは前方)に動かすことで歩行できました。
ぷぱっと歩き出した#MiniPupper #ミニぷぱ #Blynk #ESP32 pic.twitter.com/lgrTrTq3Rr
— HomeMadeGarbage (@H0meMadeGarbage) February 11, 2022
横移動
左右への横移動は 対角の足2本を上げている間に接地している足のロール角を一方に傾けることで実現できました。
前後左右にぷぱれるようになった#MiniPupper #ミニぷぱ #Blynk #ESP32 pic.twitter.com/vJILsjJ70e
— HomeMadeGarbage (@H0meMadeGarbage) February 11, 2022
ジャンプ
機体を下げて、急峻に足を伸縮させてジャンプ動作を確認することができました。
カスタムサーボのトルクの高さをうかがうことができます。
ジャンぷぱ2#MiniPupper #ミニぷぱ #Blynk #ESP32 pic.twitter.com/kgDfYbe375
— HomeMadeGarbage (@H0meMadeGarbage) February 11, 2022
おわりに
ついに4足歩行を自身の手で実現することができました。
これまで4足歩行がどのように実現されるか分かっておりませんでしたが、動画でロボット犬の歩行の様子を凝視したり 実機で色々試したりすることで大変理解が深まりました。
さらに学習をすすめ ぷぱっていこうと思います。