
6重倒立に向けて① ーリアクションホイールへの道64ー
本記事にはアフィリエイト広告が含まれます。
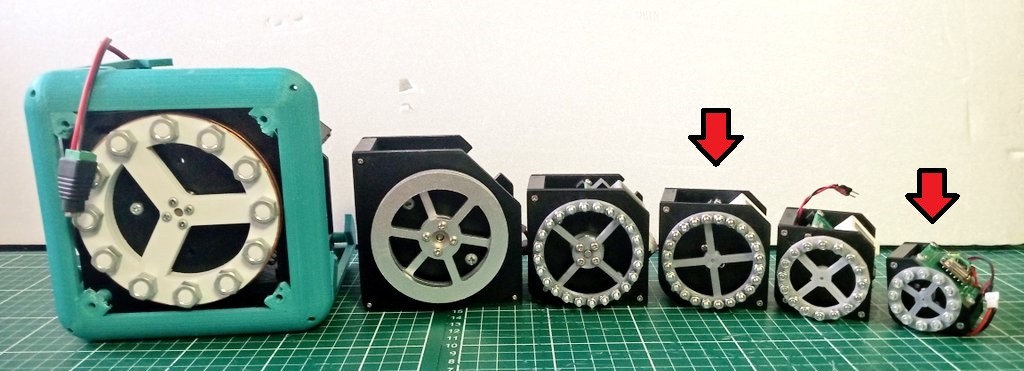
昨年末より6重倒立の達成を目指して、極小のモジュールを製作したり 第6の新規モジュールを製作いたしました。
ついに本気で6重倒立を目指して動き出します!
目次
モジュール調整
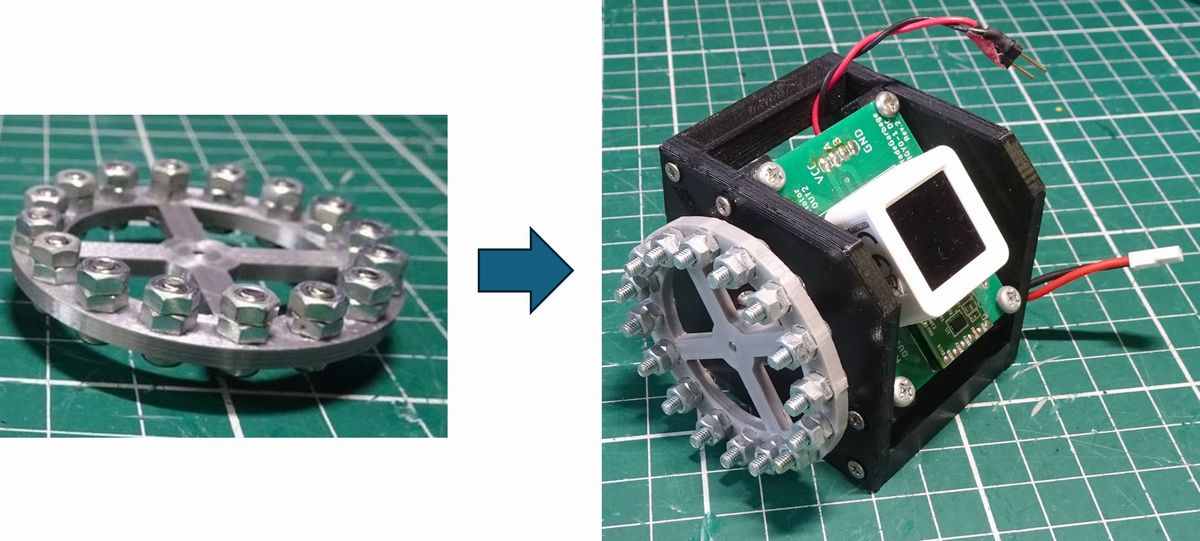
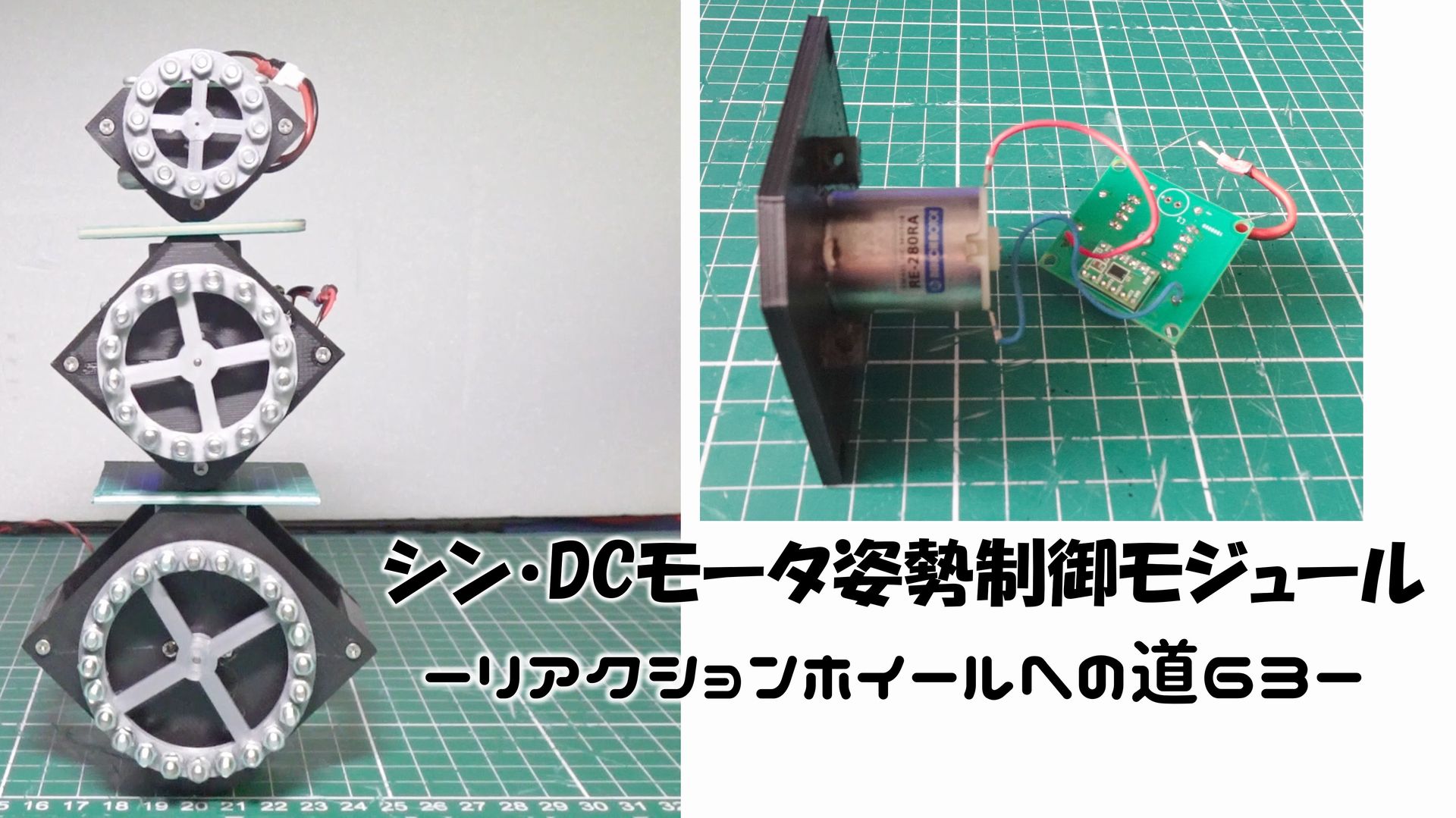
SHISEIGYO-1 DC
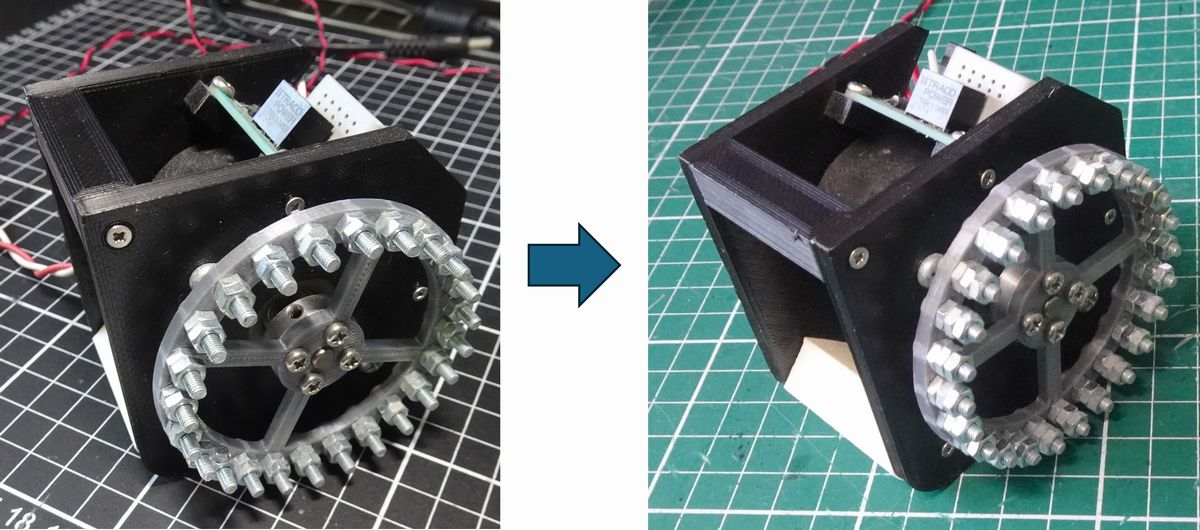
6重倒立時の上から2番目になる予定のモジュール (SHISEIGYO-1 DC)に以下の修正を施しました。
- マイコン変更 ATOM Matrix → ATOM S3
- 5V DCDCモジュール除去してLiPoバッテリ触接駆動
- ホイール重くした ネジ:8mm → 10mm
上記の修正をしたSHISEIGYO-1 DCを絡めて各種4重倒立で動作確認しました。
6重倒立時の下3段にSHISEIGYO-1 DCを載せて倒立動作を確認
安定倒立を確認できました。
4重倒立
まぁ余裕かな pic.twitter.com/8deESsECiU— HomeMadeGarbage (@H0meMadeGarbage) December 15, 2023
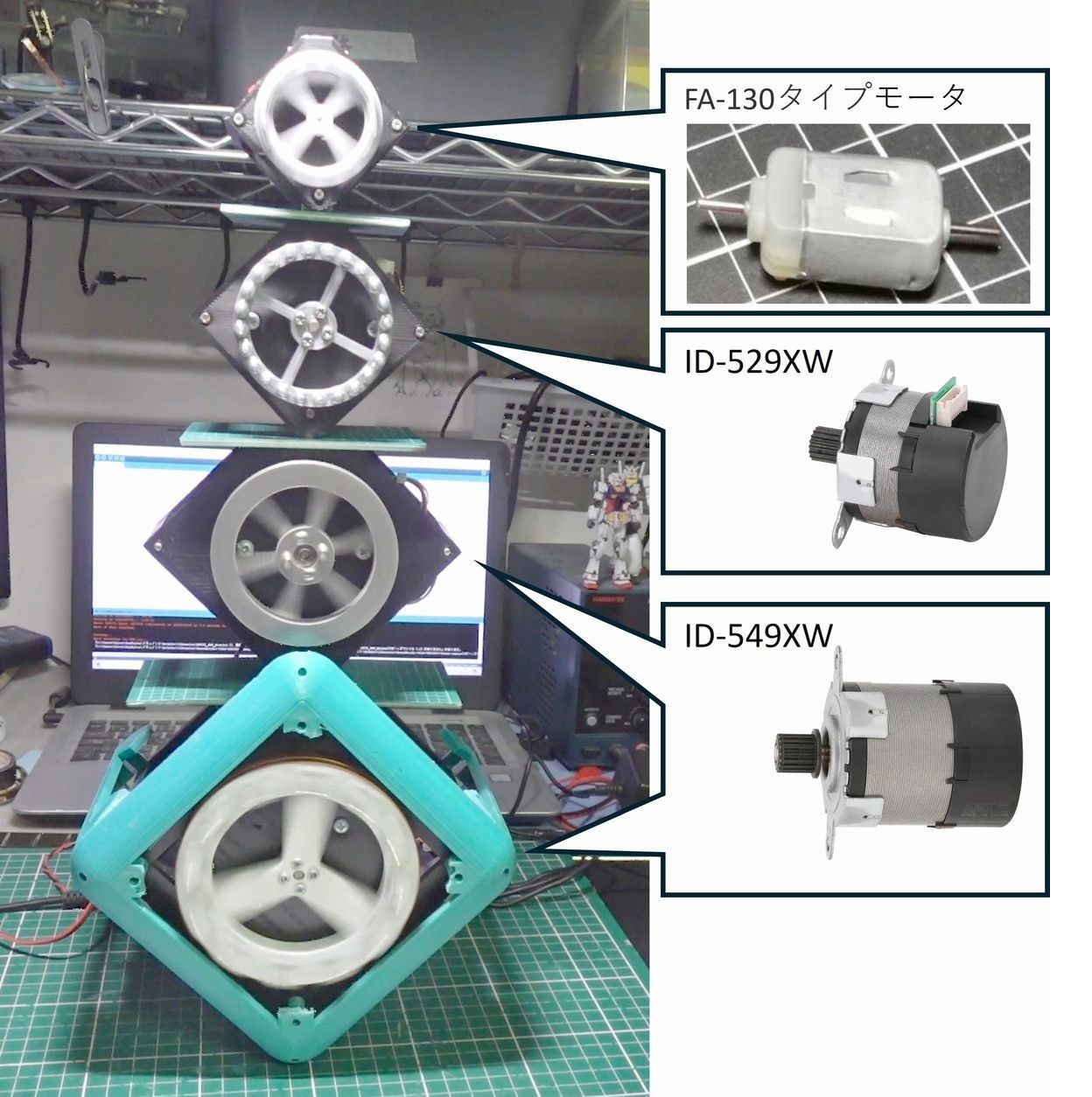
6重倒立時の一番下のモジュールに上部3段のモジュールを載せて倒立動作を確認
まずまずの安定度でSHISEIGYO-1 DCの修正は問題ないことが確認できました。
このタイプの4重倒立を楽しみました pic.twitter.com/B64goPt0iy
— HomeMadeGarbage (@H0meMadeGarbage) December 16, 2023
SHISEIGYO-1 Jr.
6重倒立時の下から3番目になる予定のモジュール (SHISEIGYO-1 Jr.)のホイールのナットを追加してトルクを増強しました。
動作は次節で紹介します。

4重倒立
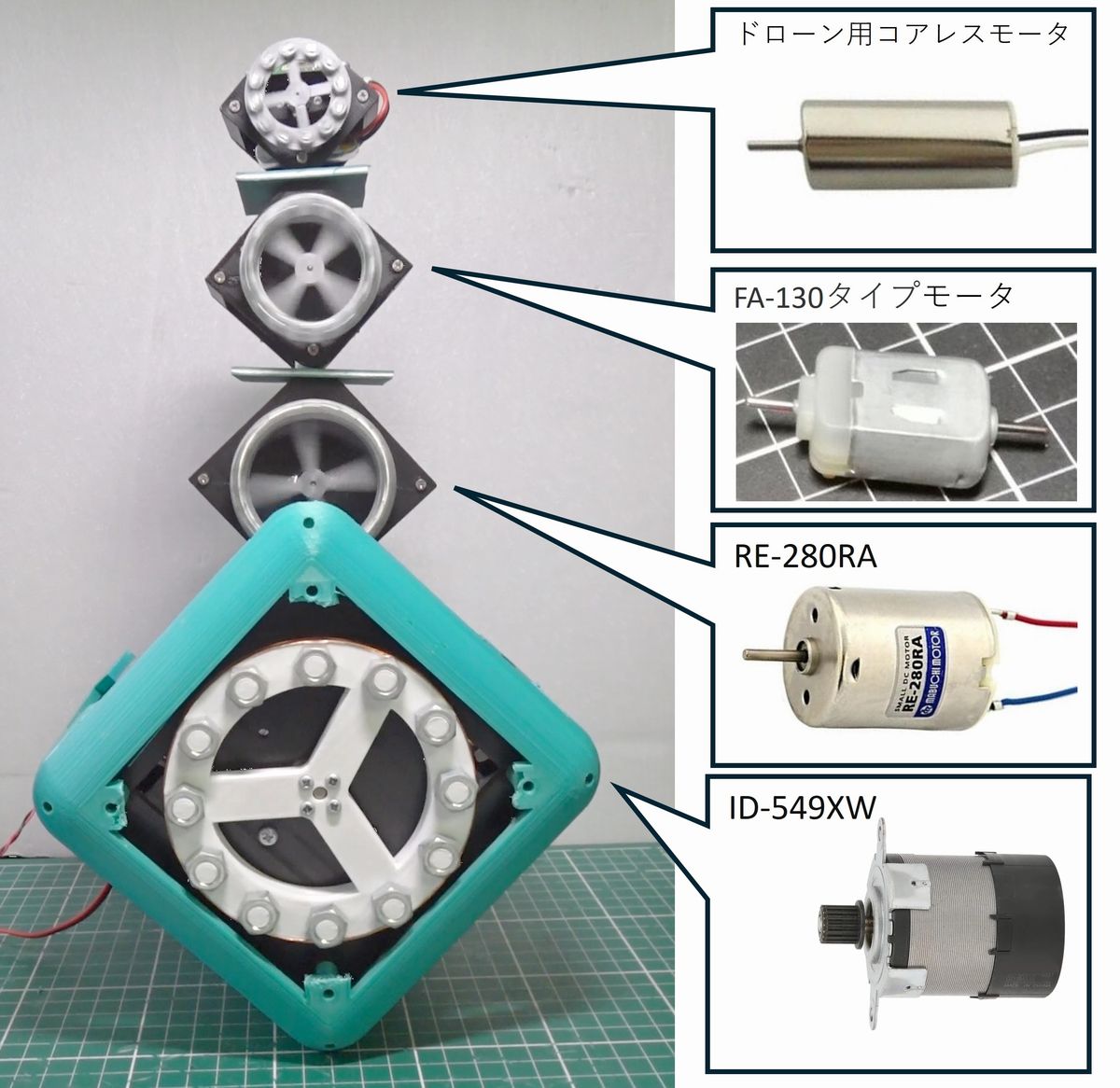
6重倒立の下部4個での倒立動作を確認しました。
界王拳6倍を目指しているわけだから平常時4倍で生活しないと話にならないのよ pic.twitter.com/uiTS0UgQ0Z
— HomeMadeGarbage (@H0meMadeGarbage) January 30, 2024
この4重倒立が安定してできないと6重倒立の実現は不可能ですので、前節のSHISEIGYO-1 Jr. (下から3番目) の変更に加えて、各モジュールの制御パラメータの調整も詳細に実施しました。
安定して長時間の4重倒立ができるようになりました。
おわりに
ここでの調整によって容易に安定した4重倒立ができるようになりましたので次回は5重、6重と挑戦を進めたいと思います。
上部4段での4重倒立がまだまだ不安定ですので、こちらの最適化から進めることになると考えています。
それではまた
次の記事

関連記事
 DCモータで姿勢制御 SHISEIGYO-1 DC 爆誕 ーリアクションホイールへの道43ー
DCモータで姿勢制御 SHISEIGYO-1 DC 爆誕 ーリアクションホイールへの道43ー
 SHISEIGYO-1 DC の改善検討 ーリアクションホイールへの道44ー
SHISEIGYO-1 DC の改善検討 ーリアクションホイールへの道44ー
 姿勢制御モジュール 4重倒立挑戦3 ーリアクションホイールへの道49ー
姿勢制御モジュール 4重倒立挑戦3 ーリアクションホイールへの道49ー
 姿勢制御装置とバーサライタの融合 ーリアクションホイールへの道50ー
姿勢制御装置とバーサライタの融合 ーリアクションホイールへの道50ー
 姿勢制御モジュール 5重倒立挑戦 ーリアクションホイールへの道57ー
姿勢制御モジュール 5重倒立挑戦 ーリアクションホイールへの道57ー
 Seeed Studio XIAO ESP32S3 で極小姿勢制御モジュール ーリアクションホイールへの道62ー
Seeed Studio XIAO ESP32S3 で極小姿勢制御モジュール ーリアクションホイールへの道62ー
 シン・DCモータ姿勢制御モジュール ーリアクションホイールへの道63ー
シン・DCモータ姿勢制御モジュール ーリアクションホイールへの道63ー
 6重倒立に向けて② ーリアクションホイールへの道65ー
6重倒立に向けて② ーリアクションホイールへの道65ー