我用声音做了一个拍灯。
 お父ちゃん
2016.5.18
お父ちゃん
2016.5.18
本記事にはアフィリエイト広告が含まれます。
我做了一个巡逻灯, 根据声音移动:-d
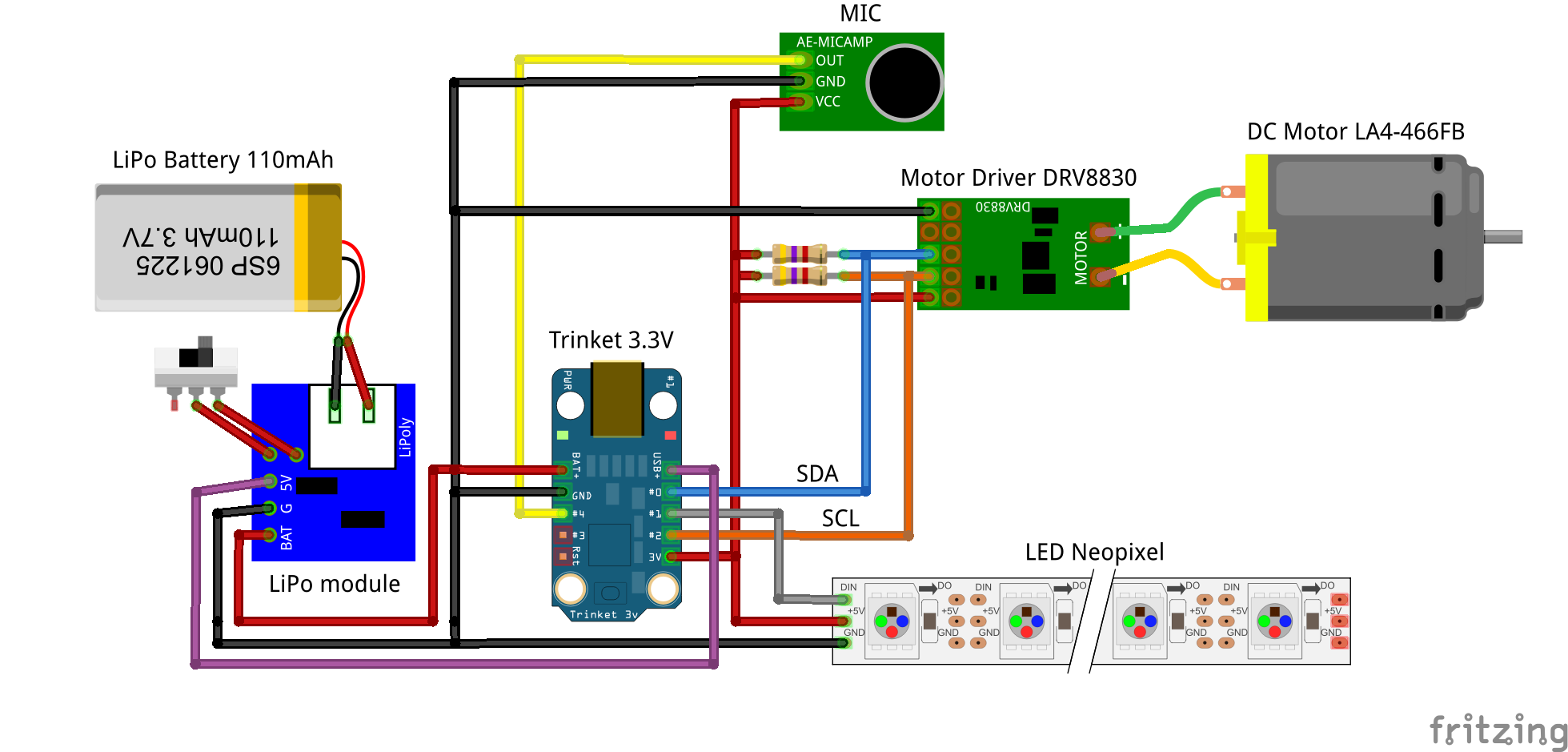
当麦克风以一定的振幅被拾取和检测时, led 发光, 一个小电机旋转。
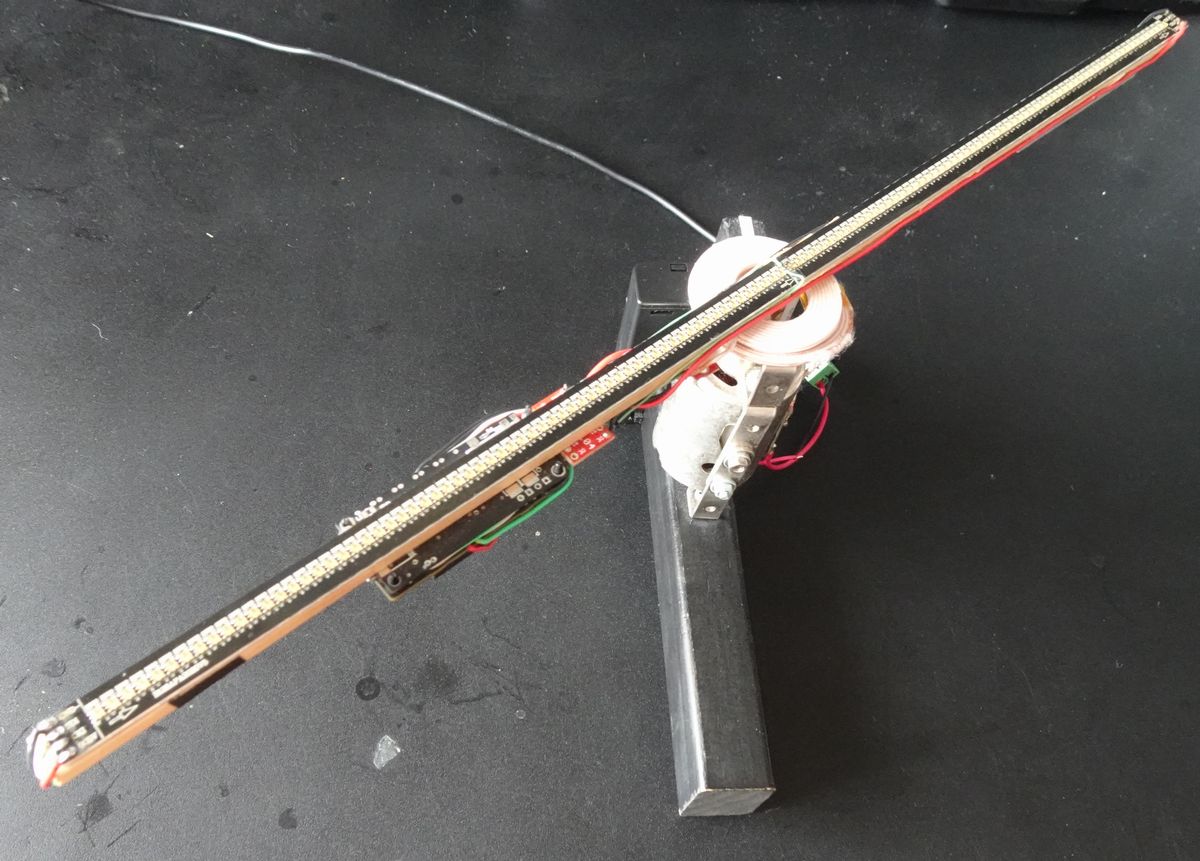
配件一览
- Motor driver module DRV8830
- The motor for the vibrating motor LA4-466FB
- LED tape neopixel
- High sensitivity MIC amplifier kit
- Lithium-ion polymer battery 110mAh
- Adafruit Trinket 3.3 V
- Trinket Battery Module



我能够

死锯的情况下
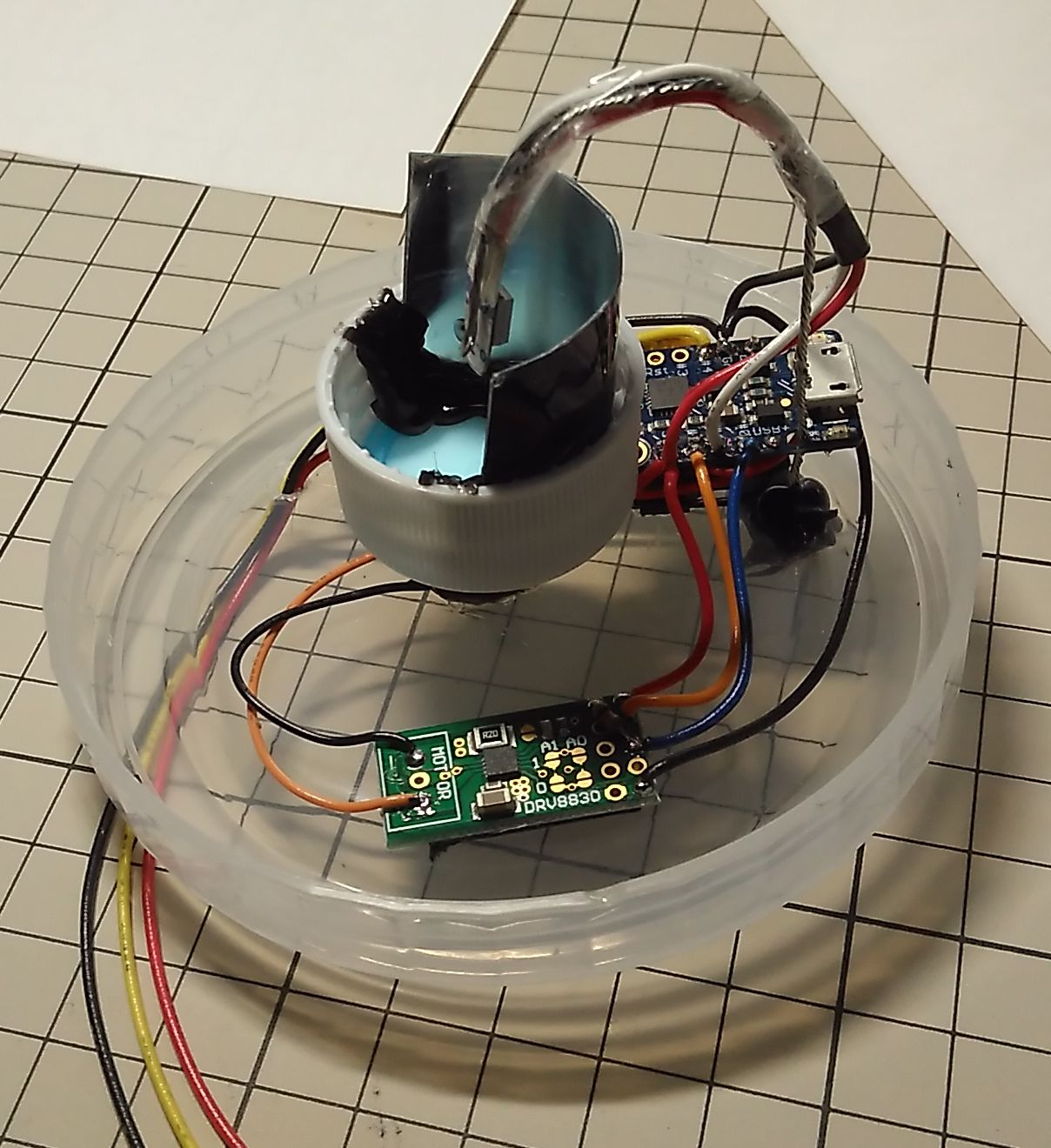
将塑料瓶盖固定在电机上, 并在电机上设置一个遮光板。
围绕中心旋转 led 胶带。
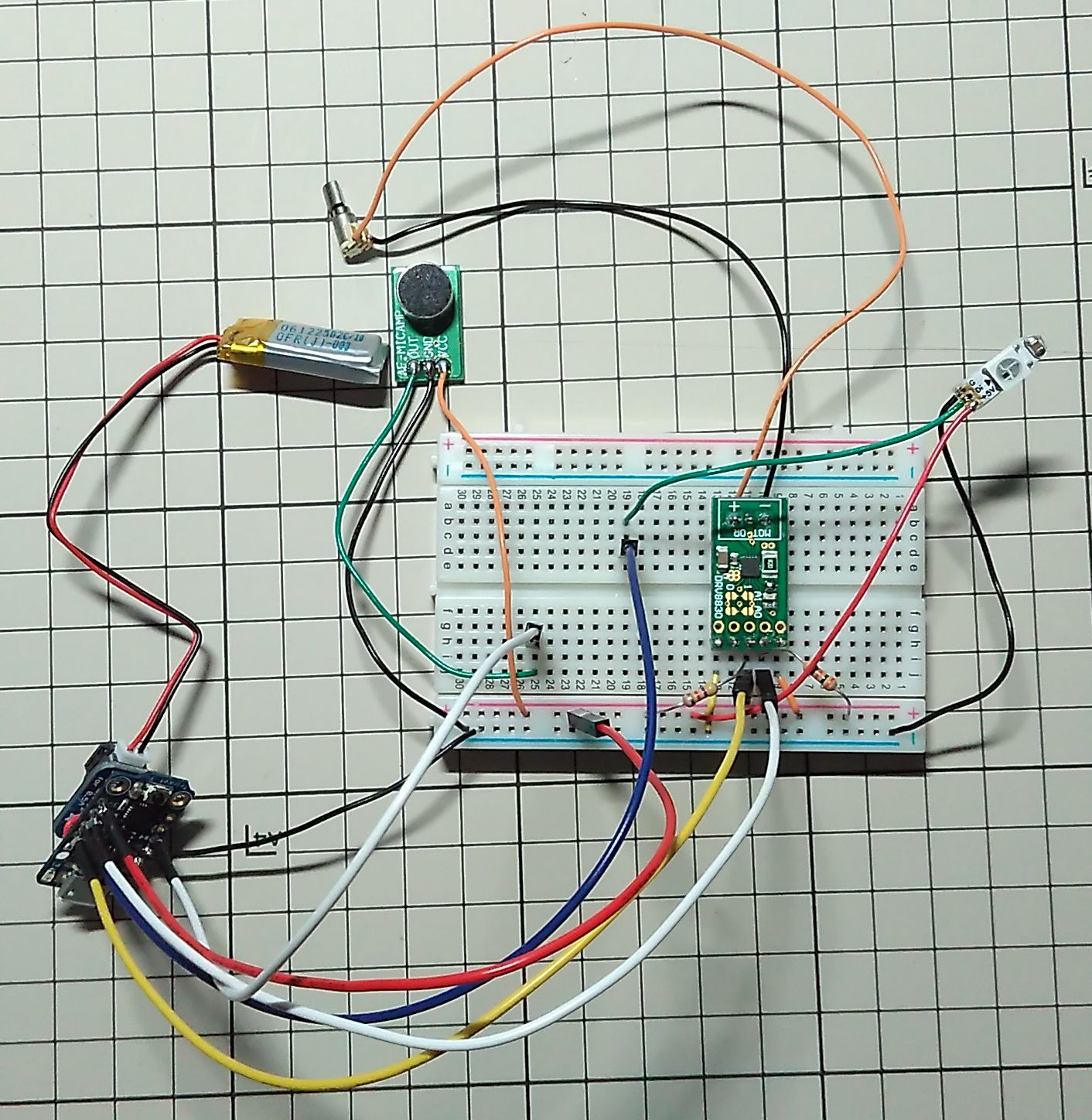
我们使用热收缩管将引导的布线组合在一起。
使用的微型计算机水果饰品体积小, 方便!可以使用 arduino 代码进行编程。写作时有一个细微的特点。此处显示了针脚等详细信息。辊
下面是 arduino ide
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 |
#include<Wire.h></Wire.h> #include<Adafruit_NeoPixel.h></Adafruit_NeoPixel.h> #ifdef _ afr _ #include<avr ower.h=""></avr> #endif const int drv8830 = 0x64; 模拟 = 2; int 传感器值 = 0; 数字输出值 #define 密码1 #define numxels 1 Adafruit _ neopixel 像素 = Adafruit _ ne教育局 (num像、pin、neo _ grb + NEO_KHZ800); 无效设置 () { 电线开始 (); 定义 #if (__avr_atiny85__) 如果 (f _ cpu = = 1600万) 时钟 _ prescale _ set (clock_div_1); #endif 像素. 开始 (); } void Writemotorresister (字节 vset, 字节数据 a1) { int vdata = vdata< 2 | data1; 2="" |=""></ 2 | data1;> 有线. 开始传输 (drv8830); wirer. write (0x00); 有线. 写入 (vdata); 有线传输 (true); } 空环 () { 传感器-值类似物 (类似物); 如果 (传感器值 > 520 传感器值< 455){></ 455){> led 灯 (红色) 像素。颜色 (255、0、0)); 像素. show (); 电机旋转 作家组织 (0x20, 0x20); 还 指示灯熄灭 像素. 清除 (); 像素. show (); 电机固定 作家组织 (0x00, 0x00); } 延迟 (50); } |
我想晚上在外面跑来跑去说 “哇”。