デジタルおかもち2
前回はサーボモータを用いてデジタルおかもちを製作しました。
前回において以下の課題や疑問が生じました
- サーボの応答が遅いのか
- 制御が遅いのか
- そもそも制御の思想自体が誤っているのか
- 手で持って移動させているのが悪いのか(実際サーボの移動に影響されてリンギングすることもあった)
ブラシレスモータを試してみた
試しに姿勢制御モジュールSHISEIGYO-1のブラシレスモータでデジタルおかもちを試してみました。
— HomeMadeGarbage (@H0meMadeGarbage) March 5, 2022
なんと!すごくいい感じに1軸デジタルおかもちが実現できました!!
おかもち台は3Dプリントして姿勢制御モジュールのホイールの代わりに取り付けました。
SHISEIGYO-1で使用しているブラシレスモータにはコントローラとエンコーダが内蔵されています。
モータの回転方向やブレーキはデジタル制御でき、回転スピードはPWM信号で制御します。
エンコーダは1周100パルス出力され、ここでは4逓倍して使用しました。
ATOM Matrixに内蔵のIMU(MPU6886)の加速度(acc)と角速度(gyro)のセンシング値を用いてカルマンフィルタを通して筐体の傾斜$θ$と角速度$ω$を計測します。
計測値とエンコーダによるモータの回転目標位置$θ_{GOAL}$を用いて
以下のようにモータ回転PWM信号$M$を生成し、PD制御しました。
$$M = {Kp}_X × (θ – θ_{GOAL}) + {Kd}_X × ω $$
$$ 但し、Kp, Kd:係数$$
ブラシレスモータによるデジタルおかもち動作は前回のサーボモータに比べ非常に応答性がよく驚きました。
ブラシレスモータでもこのように目標位置にパタッと止める制御ができちゃうんですね!
大変勉強になりました!
S&B 七味唐からし 15g×10個 https://t.co/T6FTgmsWAF pic.twitter.com/AuJaeMBn5F
— HomeMadeGarbage (@H0meMadeGarbage) March 3, 2022
前述の課題や疑問はブラシレスモータ版のデジタルおかもち体験を経て以下のようにステータスが変化しました
- サーボの応答が遅いのか
→おそい!ブラシレスモータ最高! - 制御が遅いのか
- そもそも制御の思想自体が誤っているのか
→制御思想やセンサは悪くなさそう - 手で持って移動させているのが悪いのか
→モータの応用早いと手の揺れも吸収してくれる
エンコーダ未使用版 検討
SHISEIGYO-1の機構を流用して1軸デジタルおかもちを楽しみましたが、筐体の姿勢を検出してモータを制御するためには、モータの回転量を検出するエンコーダが必須になってしまいます。
ここではエンコーダを使わない方法を検証します。
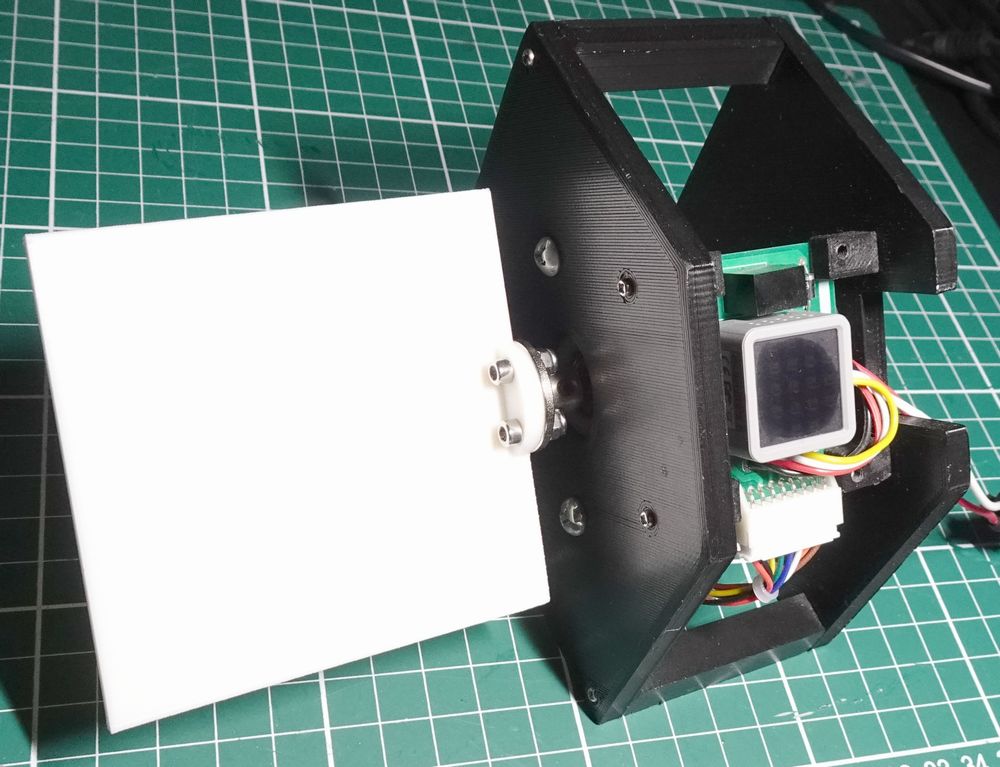
おかもち台にIMUを仕込んで、平行になるようにモータを回転させる機構にすればエンコーダは必要なくなるはずです。
早速試してみました。
台にIMUつけてブラシレスモータ制御
ブラシレスモータのエンコーダ使わずに素直に回転制御だけ回せればここまでできるもんなんだな。
コレはまた一つ おりこうさんになったわ#PD制御 #M5Stack #MPU6050 pic.twitter.com/TTIo52KzTs— HomeMadeGarbage (@H0meMadeGarbage) March 5, 2022
問題なくモータのエンコーダを使用せずにおかもち動作を確認できました。
おかもち台にはIMUセンサMPU6050をつけて、コントローラにはATOM Liteを用いました。
MPU6050で測定した加速度からおかもち台の傾斜を計測し角速度と共にカルマンフィルタを通しておかもち台の角度$θ$と角速度$ω$を計測します。
以下のようにモータ回転PWM信号$M$を生成し、PD制御でおかもち台が常に水平($θ = 0$)になるようにします。
$$M = {Kp}_X × θ + {Kd}_X × ω $$
$$ 但し、Kp, Kd:係数$$
おわりに
ここではブラシレスモータによる1軸 デジタルおかもちを検証しました。
ブラシレスモータの回転エンコーダなしでもIMUセンサに基づくブラシレスモータ制御が実現できました。
ブラシレスモータでもサーボモータのように任意角度に回転移動制御できるようになり、その応答性の良さに大変驚きました。
2軸のデジタルおかもちもブラシレスモータで実施したいのですが、ここで使用したモータは重すぎるため以下の軽そうなブラシレスモータを購入してみました。
回転させるためのコントローラが必要そうですが届き次第 勉強したいと思います。
エンコーダなしでの制御が確認できていますので2軸のブラシレスモータ デジタルおかもちの実現障壁もそれほど高くないと思っています。
それではまた。