
3軸 姿勢制御モジュール SHISEIGYO-3 安定点倒立メソッドの確立 ーリアクションホイールへの道23ー
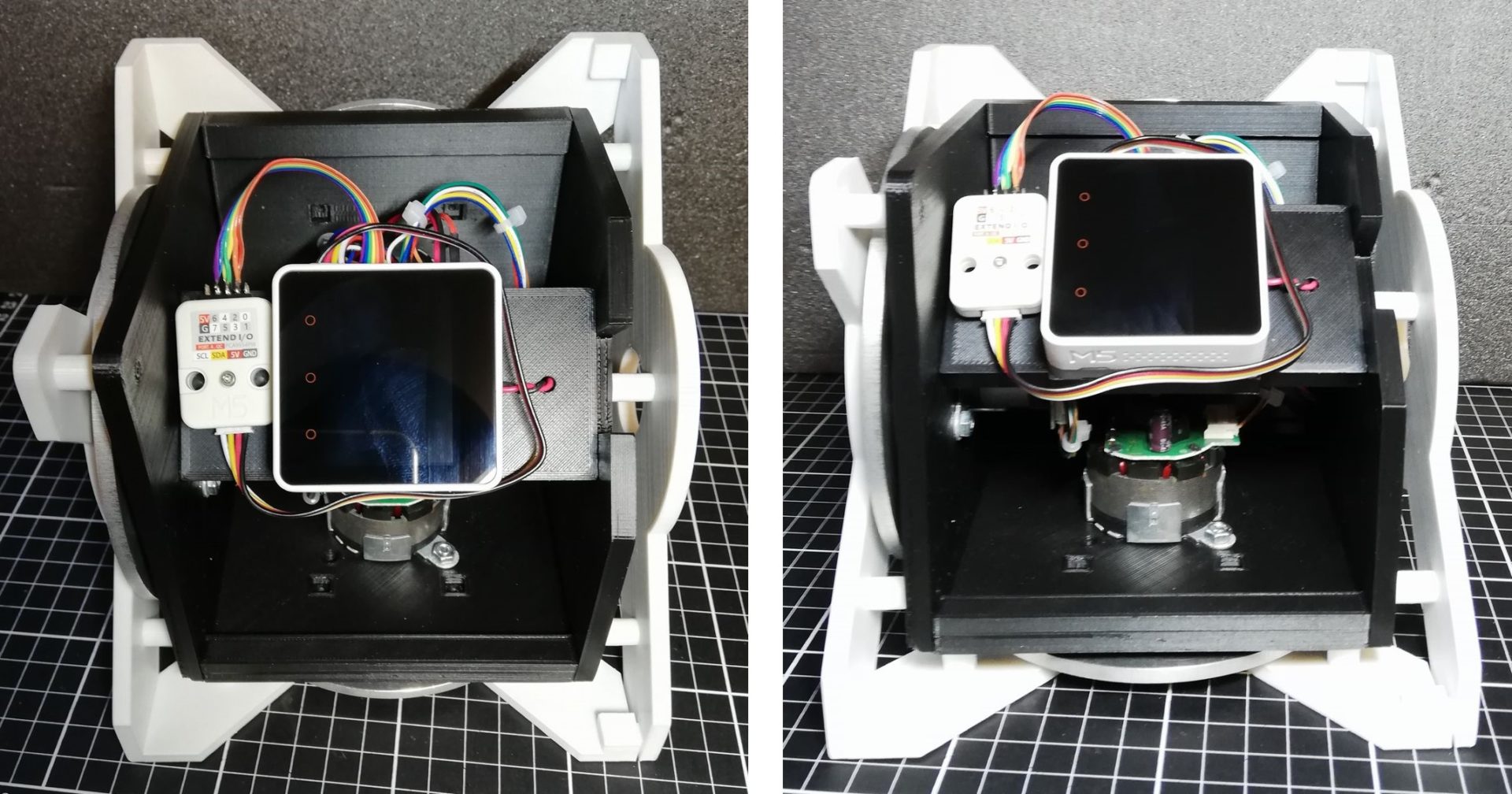
前回はマイコンにESP32、IMUに6軸モーションセンサMPU6050を採用し、
ブラシレスモータを制御し点倒立調整の準備をいたしました。
ここでは安定点倒立を目指し制御方法の検討を実施しましたので報告します。
目次
点倒立に向けて
1軸の時のように単純に3つのモータを目標の角度で倒立させる制御をするのみでは下の動画のように倒立後に自転してしまいます。
さてモータの回転状況を一元管理できるようになったは良いが
どうやって制御して点倒立時の回転を抑えようか
山ごもりが必要だ pic.twitter.com/oiBJt30IMY— HomeMadeGarbage (@H0meMadeGarbage) November 25, 2020
この回転を抑えるために以下の2つの方法で検討をいたしました。
手法① 自転を検出してモータ制御
倒立後の自転時に各モータが一方方向に回転してしまうので、
モータ速度をフィードバックして回転を打ち消す方法を試しました。
今日もよく回ってるわ
ったく#姿勢制御モジュール#リアクションホイールへの道#ESP32 pic.twitter.com/U0BsNXDFGD— HomeMadeGarbage (@H0meMadeGarbage) November 26, 2020
しかし、余計に回ってしまい自転を抑制する方法を見出すことはできませんでした。
手法② 倒立後にモータの回転を抑制
続いて逆に倒立後にモータの回転を抑制する方法を試しました。
SHISEIGYO-3の各モータは以下の式でフィードバックをかけて制御しています。
$$T_m = -K_{d1}・θ_b-K_{d2}・\dotθ_b-K_{d3}・\dotθ_w$$
$$T_mはモータのトルク、θ_bはモジュールの傾き、\dotθ_wはホイールの角速度、K_{dx}はそれぞれの係数$$
上式の第三項によって、モータは倒立後も等速で回転することがあります。
例えば床が傾いていたり、センサの誤差や筐体自体がアンバランスな場合です。
この倒立後の等速回転のために点倒立時にモジュールが自転してしまうので、
ここではこの等速回転を抑えるような制御を試してみました(詳細は次節にて)。
アイディア3つ中1つは全然ダメで残りは採用
若干安定度増すが回りだすと止められない。あともう一つ
もしく全然違う方向に進んでいるかもしれない#姿勢制御モジュール#リアクションホイールへの道#ESP32 pic.twitter.com/2ALHodkMXB— HomeMadeGarbage (@H0meMadeGarbage) November 27, 2020
完ぺきではありませんが、冒頭は非常に安定した倒立が実現されています。
したがってここではこのホイールの倒立後の等速回転を抑える手法を採用します。
倒立角 動的再調整システム
手法②では、倒立後のモータ回転速度を上式の第一項の角度にフィードバックして、
逐一 倒立ターゲット角度をモータ回転速度によって調整する手法を確立しました。
この手法を 倒立角動的再調整システム Inverted angle Dynamic Readjustment System (IDRS)と命名しました。
“IDRS” 非常にカッコいいです。
これによって倒立後に徐々に各モータの等速回転がゼロになる姿勢で安定するはずです。
しかし、前節の動画のようにまだ完ぺきには自転を抑えることはできませんでした。
更に工夫を加え、センターのモータはサイドのモータよりも急速にモータ回転速度の倒立角へのフィードバックをかけるようにしました。
もひとつだなと思いつつ飲酒し
酩酊中か夢の中か定かでないがワンアイディア浮かび
追加実装いいじゃない
あとはシラフの脳で仕上げます#姿勢制御モジュール#ESP32 #リアクションホイールへの道 pic.twitter.com/yvOn9hiyH6— HomeMadeGarbage (@H0meMadeGarbage) November 29, 2020
なかかな惜しいです。
IDRSが効いているようですので、あとはパラメータ調整するのみです。
動作
IDRSのパラメータを調整して安定倒立を目指しました。
1分以上の点倒立が実現できました。
このIDRSを更に調整すれば恒久的な点倒立が実現できそうです。
SHISEIGYO-3は今後ディスプレイを付けたり、モータを変えたりブレーキを追加する予定ですので、
とりあえずメソッドは確立できたので更なる微調整は後に回したいと思います。
おわりに
ここでは安定点倒立を実現するメソッドIDRSを確立することができました。
次は起き上がり点倒立を目指したいと思います。
この道も佳境に入ってまいりました!
いろいろ難しいこともあるかと思いますが
諦めずに頑張ります!
それでは次の道でお会いしましょう。
次の記事
関連記事
 3軸 姿勢制御モジュール SHISEIGYO-3 ESP32とMPU6050の使用 ーリアクションホイールへの道22ー
3軸 姿勢制御モジュール SHISEIGYO-3 ESP32とMPU6050の使用 ーリアクションホイールへの道22ー
 3軸 姿勢制御モジュール SHISEIGYO-3 起き上がり点倒立達成 ーリアクションホイールへの道24ー
3軸 姿勢制御モジュール SHISEIGYO-3 起き上がり点倒立達成 ーリアクションホイールへの道24ー
 3軸 姿勢制御モジュール SHISEIGYO-3 への挑戦そして挫折 ーリアクションホイールへの道16ー
3軸 姿勢制御モジュール SHISEIGYO-3 への挑戦そして挫折 ーリアクションホイールへの道16ー
 3軸 姿勢制御モジュール SHISEIGYO-3 点倒立の実現 ーリアクションホイールへの道17ー
3軸 姿勢制御モジュール SHISEIGYO-3 点倒立の実現 ーリアクションホイールへの道17ー
 3軸 姿勢制御モジュール SHISEIGYO-3 マイコン削減 ーリアクションホイールへの道19ー
3軸 姿勢制御モジュール SHISEIGYO-3 マイコン削減 ーリアクションホイールへの道19ー
 SHISEIGYO-2 を改良しました ーリアクションホイールへの道36ー
SHISEIGYO-2 を改良しました ーリアクションホイールへの道36ー
 SHISEIGYO-2 Go 爆誕 ーリアクションホイールへの道39ー
SHISEIGYO-2 Go 爆誕 ーリアクションホイールへの道39ー
 SHISEIGYO-2 Go 球体ホイールを検討 ーリアクションホイールへの道41ー
SHISEIGYO-2 Go 球体ホイールを検討 ーリアクションホイールへの道41ー