
バーサライター
電子工作作品選集 2024年
HomeMadeGarbage Advent Calendar 2024 |23日目 2024年も多くの検討や製作をしてきました。 ここで1年を振り返り その傾向から未来を占いたいと思います。 電子工作とは 今 1年を振り返るに際し目を閉じると…結局 LED光らしたりモー...
Advent Calendar / 電子工作 2024.12.23 お父ちゃん ![]()

AliExpressで安いバーサライタ買ってみた
HomeMadeGarbage Advent Calendar 2024 |11日目 AliExpressに非常に安いバーサライタ(POV Display) が売っていたので購入してみました。 3Dホログラムファンプロジェクター 私は3,549円で入手しました。安すぎるだろ ...
Advent Calendar 2024.12.11 お父ちゃん ![]()
RollerCAN でバーサライタ
RollerCAN をM5Stackオフィシャルショップで買ってみました。 [bc url="https://docs.m5stack.com/ja/unit/Unit-RollerCAN"] 以前にRoller485 Liteを購入して様々な作例を紹介してきました。 http...
電子工作 2024.11.28 お父ちゃん ![]()

狭ピッチLEDテープを試してみた
長いこと欲しい欲しいと憧れの思いを持っていた狭ピッチのLEDテープをアリエクで見つけました。 [bc url="https://ja.aliexpress.com/item/1005006171052147.html?spm=a2g0o.order_list.order_list_main.10....
3D Display “VoluMetron”
HomeMadeGarbage Advent Calendar 2022 |1日目 今年も M5Stack Japan Creativity Contest に参加するべく、3D ディスプレイを製作しましたので製作過程など詳細報告させていただきます。 [bc url="https://proto...
Advent Calendar / 電子工作 2022.12.1 お父ちゃん ![]()
球体POVつくってみた -球体POV製作への道 その10-
先日、スリップリングを用いて姿勢制御モジュールとPOVの融合による新たな表現を検証いたしました。 https://homemadegarbage.com/reactionwheel51 ここでは姿勢制御POVの機構をそのまま流用して、長年の夢であった球体POVを作ってみました。 ...
姿勢制御装置とバーサライタの融合2 ーリアクションホイールへの道51ー
前回は 1軸 姿勢制御モジュール SHISEIGYO-1のホイールにLEDをつけてバーサライタ動作させてみました。 https://homemadegarbage.com/reactionwheel50 姿勢制御モジュールのホイールはバランス状況によって正転・逆転及び...

姿勢制御装置とバーサライタの融合 ーリアクションホイールへの道50ー
姿勢制御モジュールのホイールにLEDを付けてバーサライタにしてみてはどうだろう。 思いついてしまったので どうなるかは考えずに作り上げることだけを考えて手を動かした。 ちょうど祝日 天皇誕生日。俺なりの祝いの儀式だ。 とにかく作る 1軸 姿勢制御モジュール SH...
電子工作 2022.2.24 お父ちゃん ![]()

ダーターでデバイスがもらえた電子工作コンテスト
電子工作系のコンテストは事前にサンプルをくれたり、参加賞をいただけるものが多いです。 こういった施策は応募者にとって大変うれしいですよね。 私はダーターでデバイスがもらえるコンテストが大好きです。なぜならダーターだがら。 ここではこれまで実際にデバイスをゲットできたコンテストをまとめます。 ...
電子工作 2021.4.18 お父ちゃん ![]()

Raspberry Pi Pico バーサライタで PIO を考えるーRaspberry Pi Picoへの道8ー
前回は狭ピッチLEDバーを用いてバーサライタを製作しました。 https://homemadegarbage.com/pipico07 LEDを2本 Raspberry Pi Pico の2つのSPI出力でそれぞれ制御しました。 その際にシングルコアでの制御とデュアルコア制御で...
Raspberry Pi 2021.2.16 お父ちゃん ![]()
Raspberry Pi Pico バーサライタ解像度向上 (C/マルチコア) ーRaspberry Pi Picoへの道7ー
前回はRaspberry Pi Pico を用いてバーサライタを製作しました。 https://homemadegarbage.com/pipico06 ここでは、表示映像の解像度向上のためにSPI複数出力とデュアルコア動作を検証しましたので報告します。 SPI複...
Raspberry Pi 2021.2.15 お父ちゃん ![]()

立体 バーサライタ – 3D POV Display –
これまで私は様々なバーサライタ(POV ディスプレイ)を製作してきました。 そうした中で何となく平面のバーサライタを立体的に積み上げて立体表示できるのではと考えておりました。 なんかめんどくさそうだし、費用もかかるだろうと思考実験の枠組みから出ないまま時は過ぎたのですが この度良い機会に恵まれ...
電子工作 2021.2.14 お父ちゃん ![]()

Raspberry Pi Pico でバーサライタ製作 (C/C++) ーRaspberry Pi Picoへの道6ー
前回はフォトリフレクタによる割り込みでLED制御を試しました。 https://homemadegarbage.com/pipico05 今回はついにRaspberry Pi Pico でバーサライタを製作しました。 バーサライタ構成 構成はこれまで製作してきた...
Raspberry Pi 2021.2.13 お父ちゃん ![]()

NeoPixel でバーサライタ検討
以前、M5Stack ATOM Matrix で ハンディーバーサライタを製作を楽しんだのですが、LED25個のマトリクスの1列分である5個のLEDしか使用しておらずもったいないなと感じておりました。 https://homemadegarbage.com/atom04 この"もったいな...
電子工作 2020.6.10 お父ちゃん ![]()
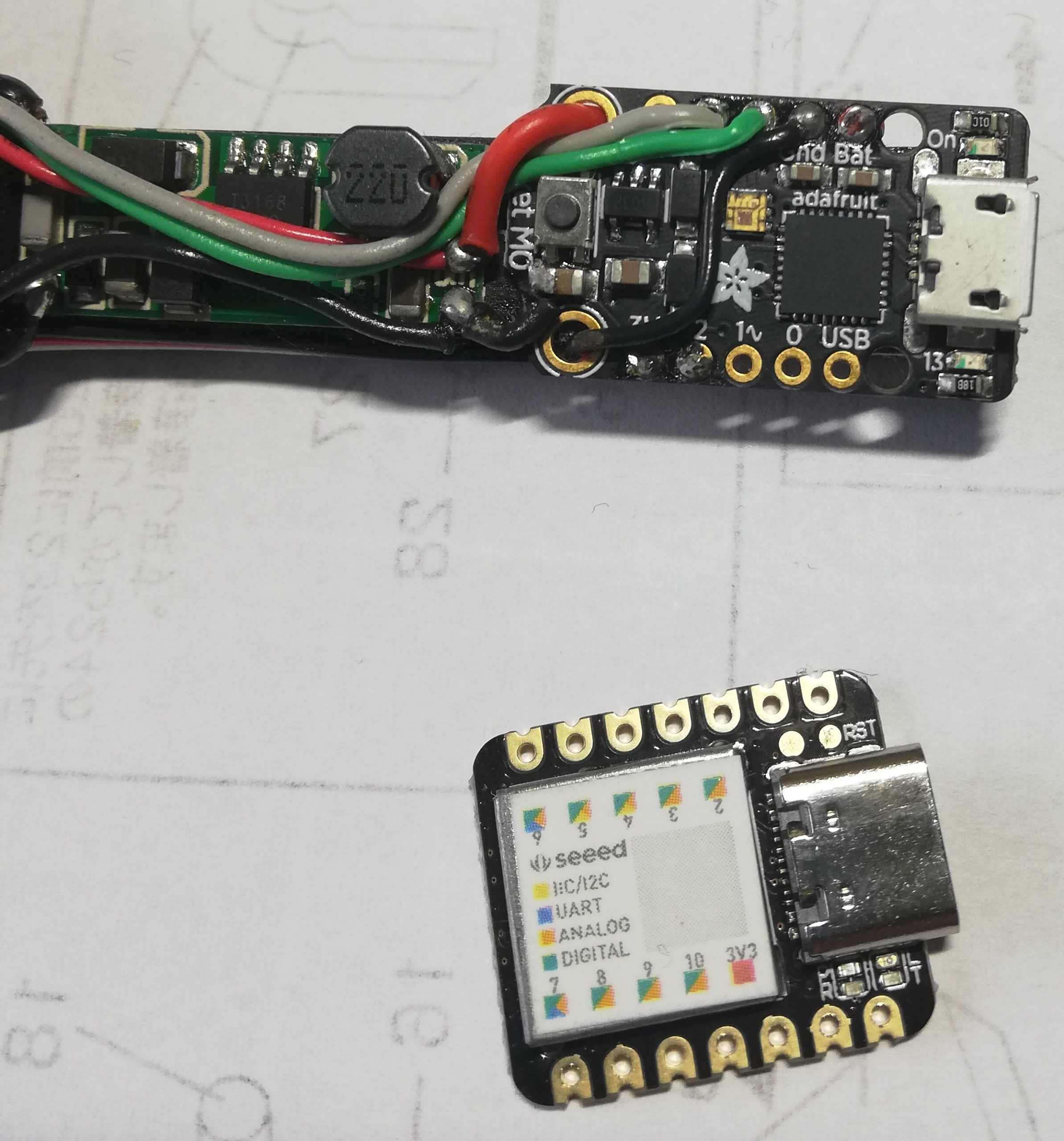
Seeeduino XIAOを使ってみた
Seeeduino XIAOという実に可愛いマイコンを購入しました。 安くて小さくて高性能でしたので紹介させてください。 [bc url="http://akizukidenshi.com/catalog/g/gM-15178/"] [amazonjs asin="B086KXY929" lo...
電子工作 2020.5.8 お父ちゃん ![]()