電子工作作品選集 2024年
本記事にはアフィリエイト広告が含まれます。
HomeMadeGarbage Advent Calendar 2024 |23日目
2024年も多くの検討や製作をしてきました。
ここで1年を振り返り その傾向から未来を占いたいと思います。

目次
電子工作とは
今 1年を振り返るに際し目を閉じると…結局 LED光らしたりモータ回したりしてるだけだったなぁと
でもさぁ電子工作ってLED光らしたりモータ回すことでしょ。ほかに何かすることある??
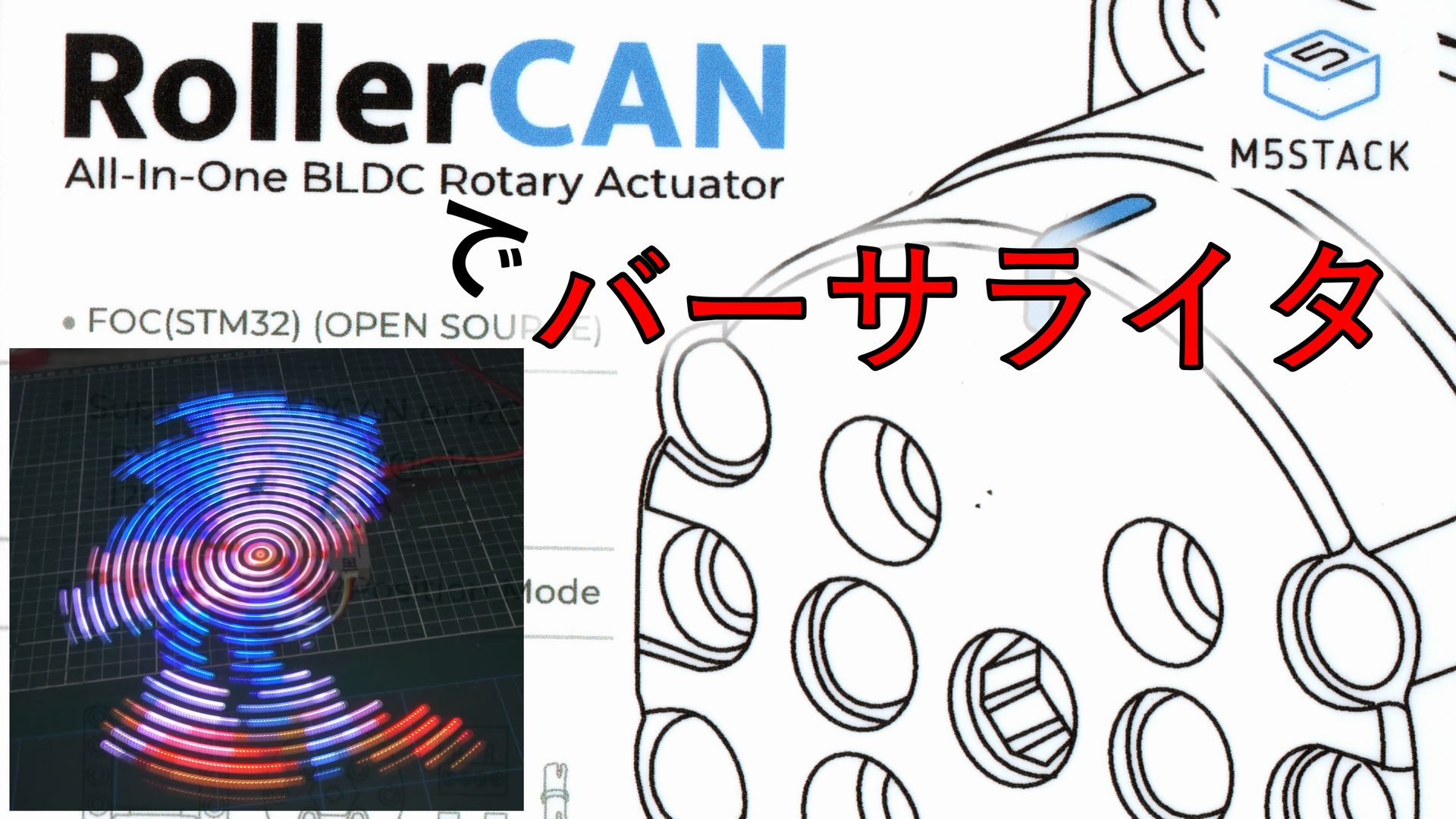
いいLEDテープが手に入ったので、球体バーサライタにしてたのしみました。
新しく良い部品を入手すると性能評価の為に作るものが私の場合はバーサライタだったりします。
去年製作したサーボモータ KRS-3301 ICS を用いた2足歩行ロボットを用いて歩行の再検討も実施しました。
ゼロからのハード製作から解き放たれて後に良いアイディアが湧くということはよくあることで、ここではIMUセンサと絡めた歩行について検証しました。
今年も相変わらず倒立振子を製作してしまいました。
モータを単に回すだけではなく物理と結び付けて、結果がビジュアル的にも強烈に分かりやすい点が旨味であります。
基本的には上記のように新しい部品で例年と同様のことをしたという一年でしたが以下でトピックごとにまとめて振り返ります。
姿勢制御モジュール
姿勢制御モジュール SHISEIGYOシリーズの開発はもはやライフワークとなっております。
今年は辺倒立モジュールの6段積み倒立に成功いたしました。
来年2025年は7重倒立を目指したいと思います。
ドローン用小型モータを用いた小型3軸姿勢制御モジュール SHISEIGYO-3 DCの製作に成功し、製法を公開しております。
SHISEIGYO-3 DC を応用して底面にホイールを追加した一輪走行ロボットも製作いたしました。
3軸姿勢制御モジュールについては3段積みに成功しておりますので、来年2025年は4重を目指しても面白いかもしれません。
4脚ロボット
高性能シリアルサーボ STS3032 を用いた4脚ロボットを製作し、バランスやバク転など表現豊かな動作実現を検証しました。
比較的低価格で優秀なシリアルサーボ SCS0009 による4脚ロボットの製法を以下に記載しました。
バク転も可能です。
Wheeled Quadruped Robot
4脚ロボットの足先にホイールを追加した Wheeled Quadruped Robot の研究も去年に引き続き実施しました。
コンテスト用にSPRESENSEを用いてWheeled Quadruped Robot を製作し、みごと受賞できたことも良い思い出です。
マイコンをATOM Matrixに替えてPS4コントローラによる操作も楽しみました。
更にバク転や直立倒立など更なる高度動作の実現の検証もいたしました。
ここまで関節にシリアルサーボを用いてきましたが やりたいことに対するスピードやパワーにそろそろ限界を感じてきております。
そこでブラシレスモータを活用できないかと検証を開始しました。
来年あたりに良い結果が出ればと願っています。
SimpleFOC
今年はSimpleFOCライブラリとの出会いがありました。
ライブラリの学習をし、ライブラリ自体やブラシレスモータ駆動の理解を深めて距離を縮めました。
SimpleFOCで各種駆動方式を検証し、そのご利益を全身で堪能しました。
SimpleFOCライブラリより享受したご利益でもって 姿勢制御モジュールや倒立振子を製作しました。
もうどんなモータが来ても怖くありません。
来年もSimpleFOCを存分に活用してブラシレスモータ工作を楽しむことになると思います。
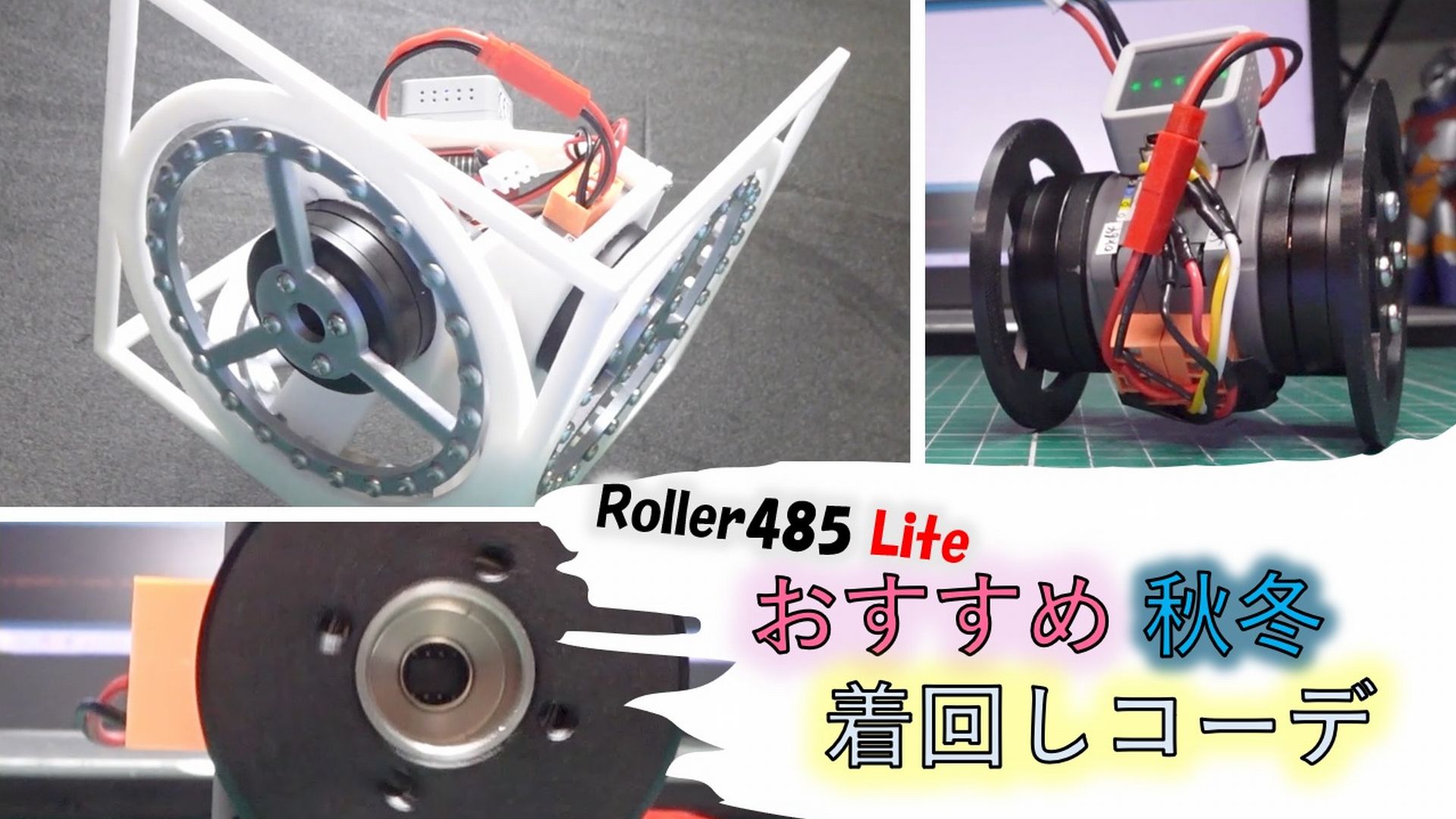
Roller
M5Stack社のブラシレスモータモジュールのRollerシリーズを購入し、様々な活用を楽しみました。
Roller485もしくはRollerCANはマイコン内蔵の為、簡単な通信で高度な回転動作の実現が可能です。
以下のとおり あふれんばかりの様々な作例をブログで紹介させていただきました。
Rollerシリーズの活用につきましてはまだまだアイディアが尽きないので、来年も楽しませていただくことになるでしょう。
玉乗りロボット
玉乗りロボットの検討も実施したのですが、球を縦横無尽に移動させる制御ができず悩み中です。
まだ制御方式や機体重量についてまだ掴み切れていない点があるので、来年こそは進展を得たいです。
おわりに
2024年はとびきり新しいことへの挑戦はありませんでしたが、良い部品やライブラリに出会うことができ成長があったと信じております。
2025年こそは本気出すんで是非注目しててください。