3重点倒立 ーリアクションホイールへの道70ー
本記事にはアフィリエイト広告が含まれます。
先日 SimpleFOCでのブラシレスモータ制御による3軸姿勢制御モジュールを製作しました。
これにより手元に3機の3軸姿勢制御モジュールがそろいましたのでちょっと余計なことをしてみました。

目次
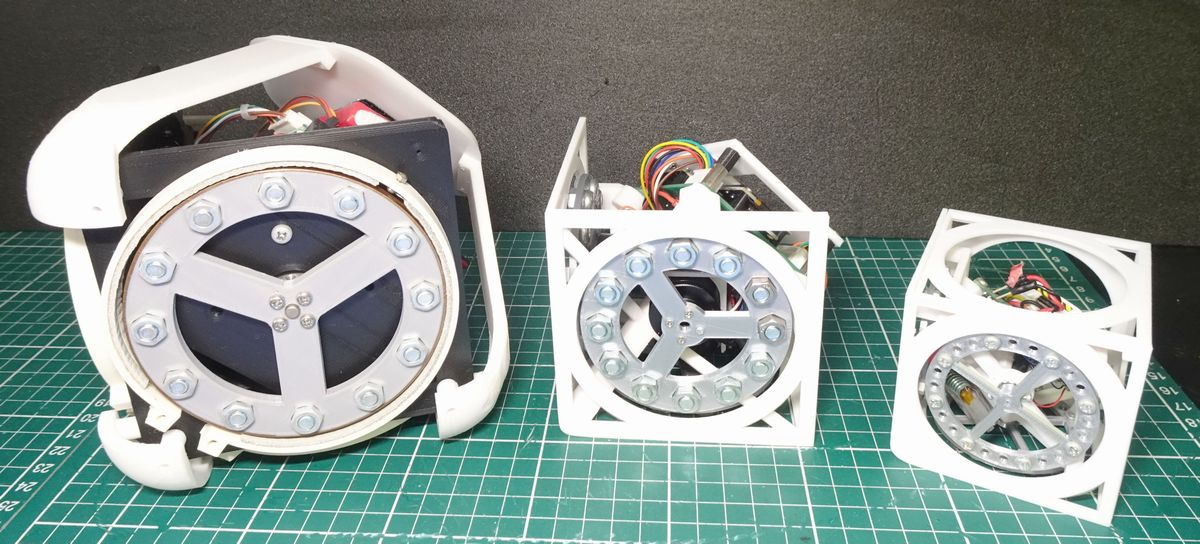
3機の3軸姿勢制御モジュール
大中小 3つの3軸姿勢制御モジュールがそろったということは、3重点倒立を実施せよとのことだと私は解釈いたしました。
やるしかないっしょ
SHISEIGYO-3 参
いちばん大きな3軸姿勢制御モジュールはエンコーダ内蔵ブラシレスモータ ID-549XWを用いたもので起き上がりも可能です。
SHISEIGYO-3 FOC
中の3軸姿勢制御モジュールは前回製作したカメラジンバル用ブラシレスモータを用いたものです。
exotic love pic.twitter.com/W8VcuRMWh6
— HomeMadeGarbage (@H0meMadeGarbage) October 3, 2024
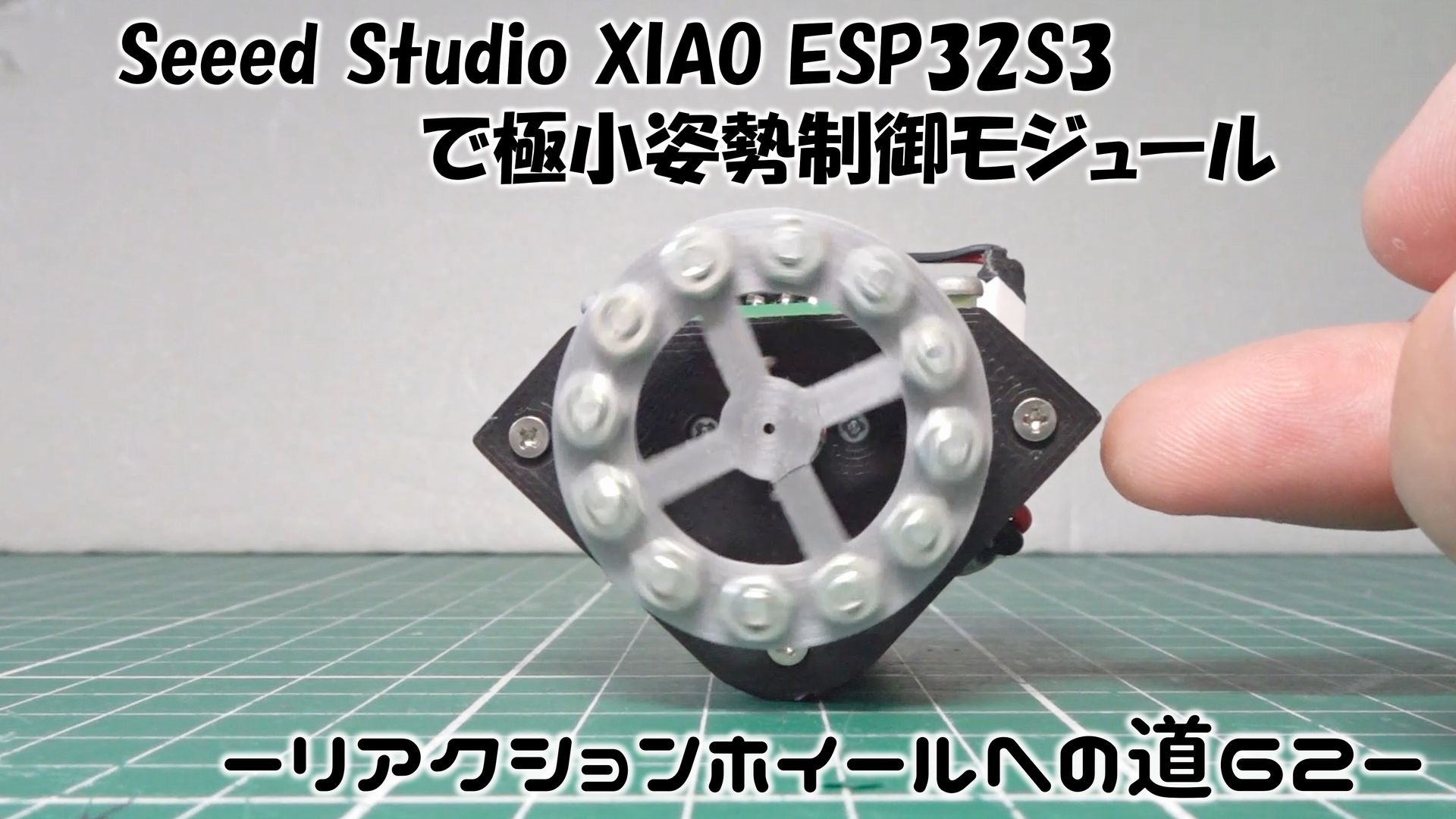
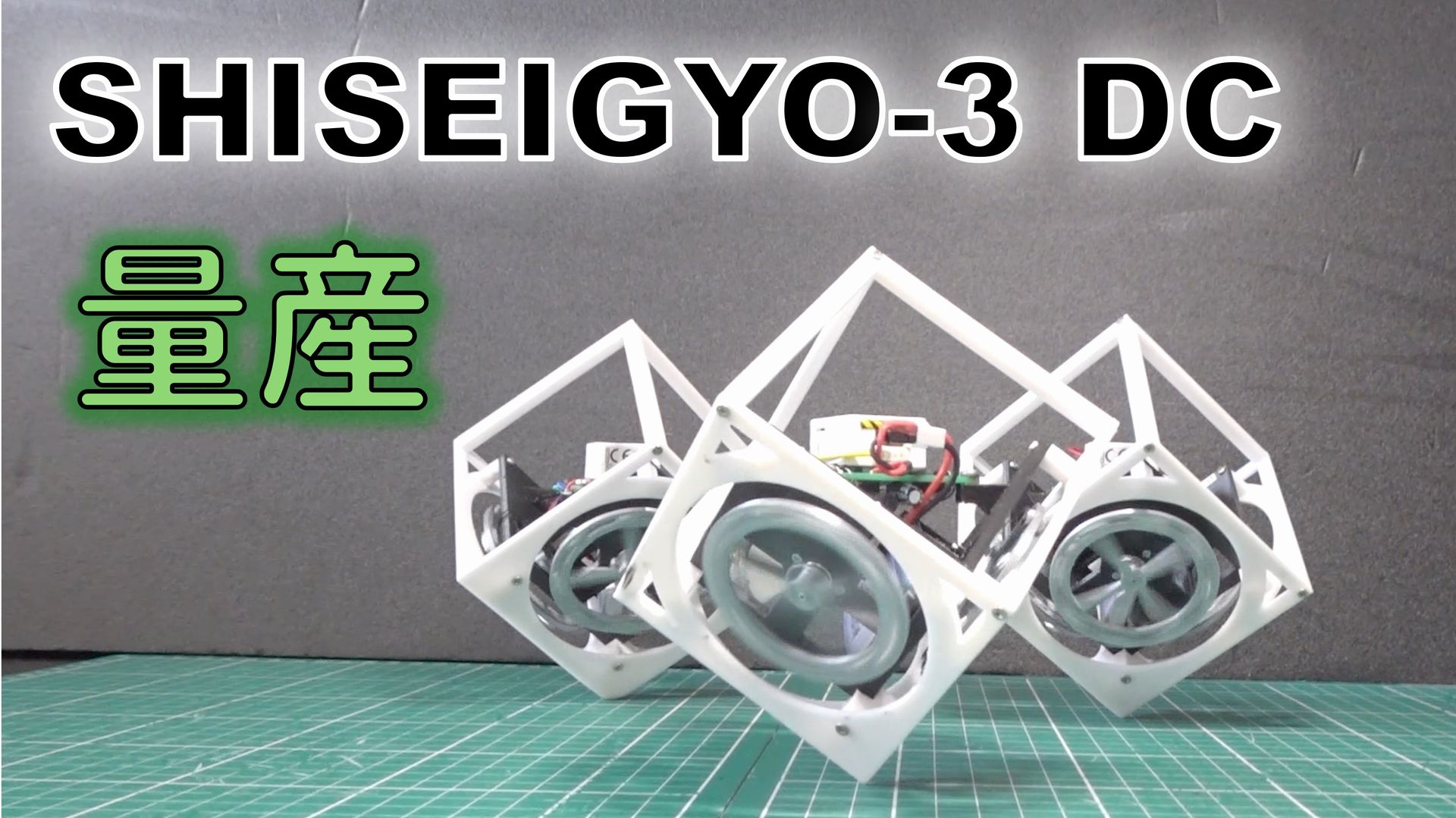
SHISEIGYO-3 DC
いちばんちいさい3軸姿勢制御モジュールはドローン用コアレスモータを使用して製作したものです。
前哨戦 2重点倒立
SHISEIGYO-3 参 とSHISEIGYO-3 DC による2重点倒立は既に実施済みです。
Around The World#PiDay2024 pic.twitter.com/D6vDUJt3zv
— HomeMadeGarbage (@H0meMadeGarbage) March 14, 2024
3重点倒立にむけて各モジュールを調整し、まずは安定2重点倒立を目指します。
SHISEIGYO-3 FOC 調整
ホイールのM6ネジを増やしてトルクを増強しました。
2重倒立
ちょっときつい
角速度変動低減するべく底面を丸めましょう pic.twitter.com/t1mifY3V1o— HomeMadeGarbage (@H0meMadeGarbage) October 5, 2024
ちょっと外乱に過敏に反応してしまうので低減のために倒立点の角をR10mmほどに丸めました。
上にSHISEIGYO-3 DCを載せても角を丸めたことによって角速度変動が低減して、結果的に外乱に強くなり安定2重点倒立が実現できました。
底の角ちょっと丸めて安定的2重点倒立実現 pic.twitter.com/xUdTzHhpFT
— HomeMadeGarbage (@H0meMadeGarbage) October 5, 2024
SHISEIGYO-3 参 調整
SHISEIGYO-3 参 の倒立パラメータを調整して回転トルクを増しました。
起上り点倒立はできなくなりましたが外乱には強くなり積載可能重量が増しました。
このタイプの2重倒立にも成功
時は来た! pic.twitter.com/iO3mMoDAl1— HomeMadeGarbage (@H0meMadeGarbage) October 6, 2024
SHISEIGYO-3 DC 調整
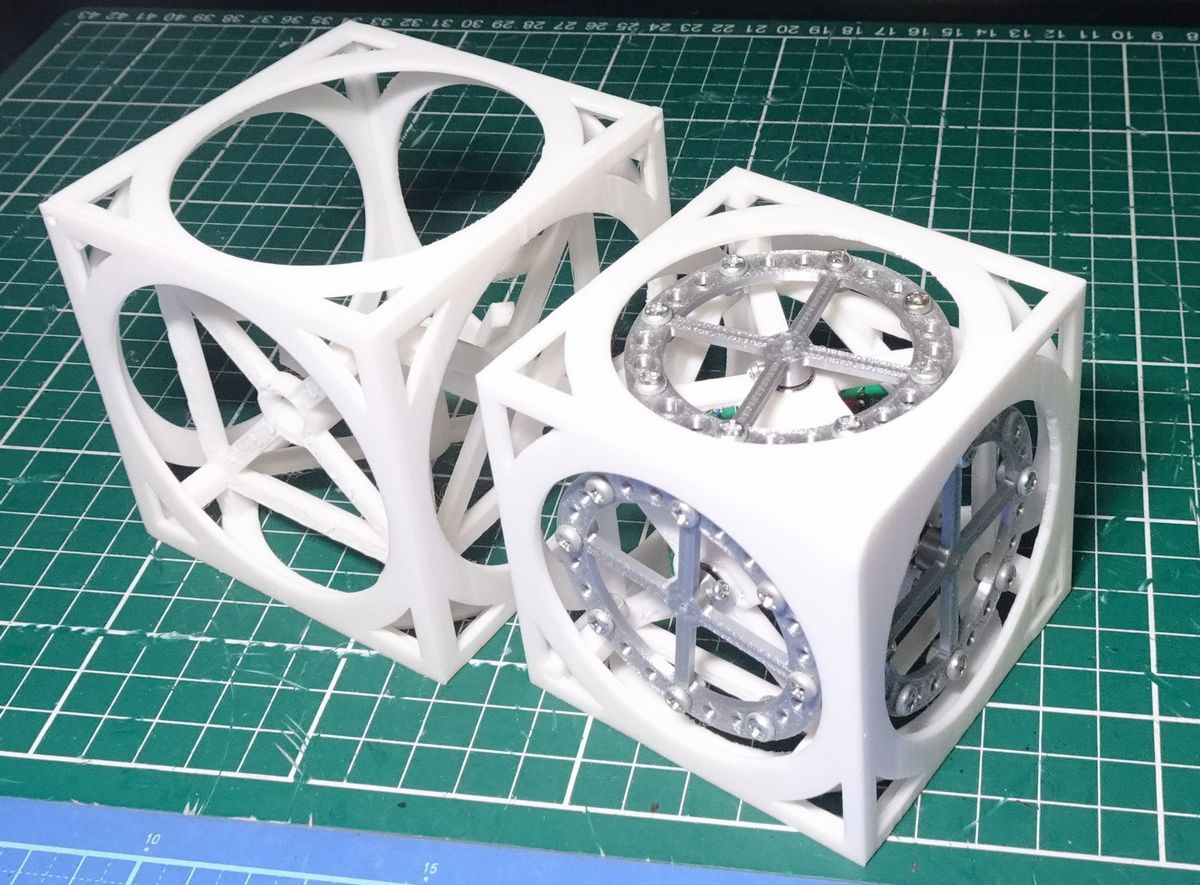
3重倒立時に一番上にのせるSHISEIGYO-3 DC ものせ易さと外乱耐性の向上を狙って倒立点の角をR10mmほどに丸めました。
ついでにサイズも一辺 82mm から 73mmにシュリンク
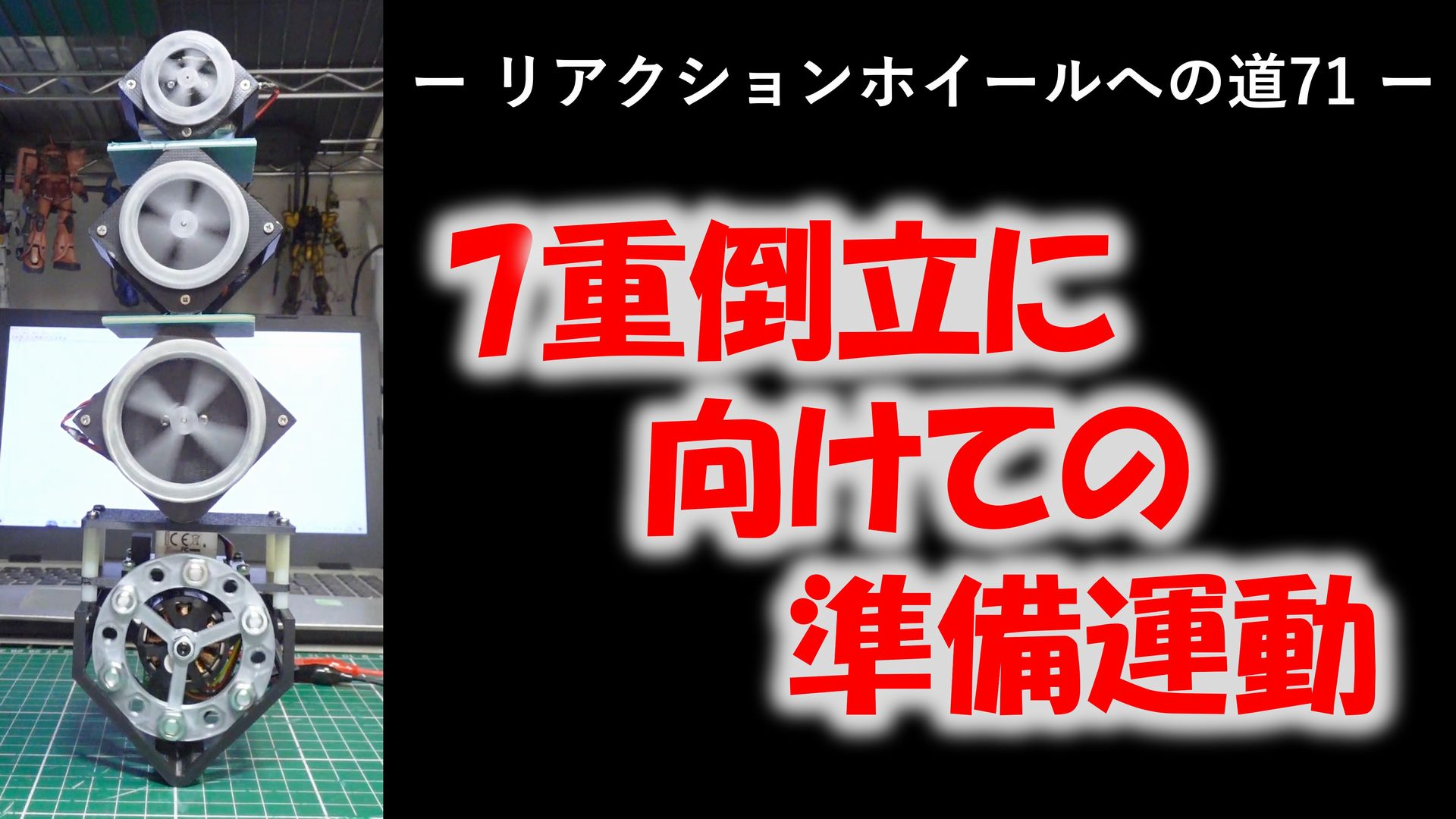
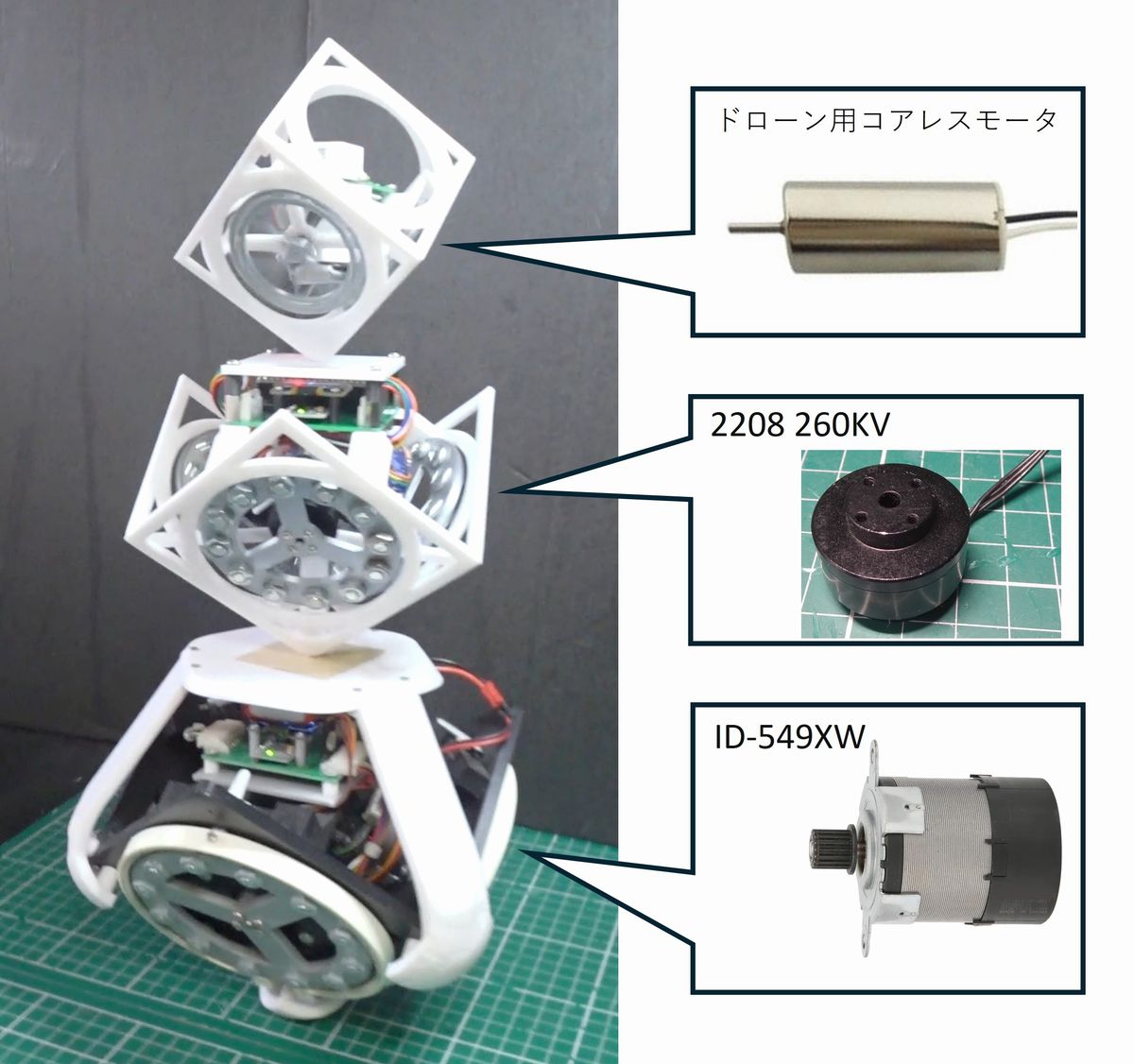
3重点倒立
調整も完了したのでいよいよ3重点倒立に挑戦
安定して3重倒立ができたとは言えませんが。。。実現はできました。
安定的3重点倒立は来年の4重点倒立実施の際に目指したいと思いますww
モータ構成は以下のとおり
おわりに
ここでは3機の3軸姿勢制御モジュールを用いて3重点倒立に挑戦いたしました。
絶対安定ではありませんが3重倒立を実現することができました。
来年は7重辺倒立と合わせて4重点倒立にも挑戦したいと思います。
追記
2024/10/9
載せる技術も向上してだいぶ安定して3重点倒立できるようになってきた。
載せる技術も向上してだいぶ安定して3重点倒立できるようになってきた。
コレで全国のイオンモール回らせてくれないかな
合わせて算数・理科学習の大切さや自分で考えて作る楽しさもお伝えできます。 pic.twitter.com/iOr6XrMtzI— HomeMadeGarbage (@H0meMadeGarbage) October 9, 2024