
WiFi
Arduino MKR WiFi 1010 ベランダ太陽光発電 気象観測システム 1000日達成
2021年9月21日から本格運用を開始しましたベランダ太陽光発電 気象観測システムが本日で運用から1000日達成となりました。 まだまだまだ元気に動いております。 構成 ベランダ太陽光発電 気象観測システムの構成は以下の通り。 マイコン Arduino MKR W...
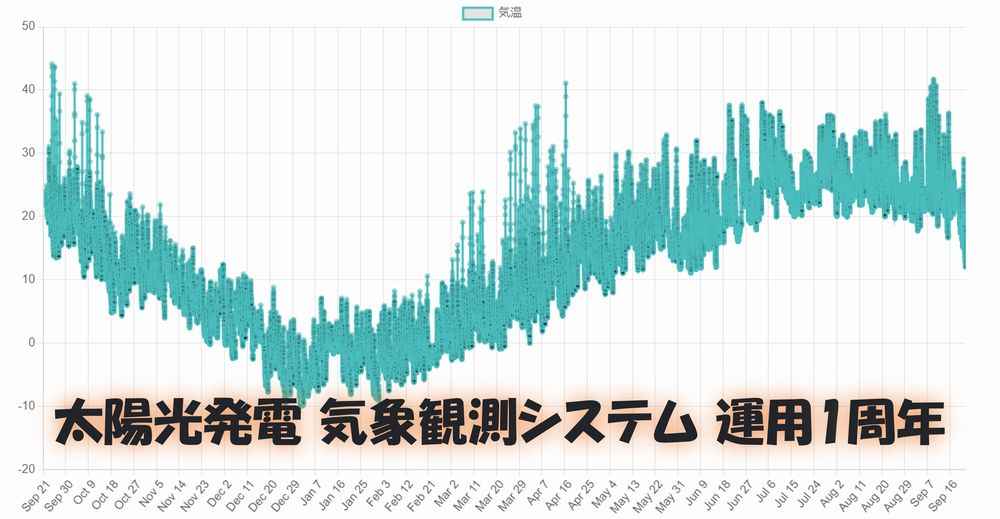
Arduino MKR WiFi 1010 ベランダ太陽光発電 気象観測システム 1周年
2021年9月21日から本格運用を開始しましたベランダ太陽光発電 気象観測システムが遂に1周年を迎えました。 まだまだ元気に動いておりますよ。 構成おさらい ベランダ太陽光発電 気象観測システムの構成は以下の通り。 マイコン Arduino MKR WiFi 1...
Arduino MKR WiFi 1010 ベランダ太陽光発電 温湿度センシング検討
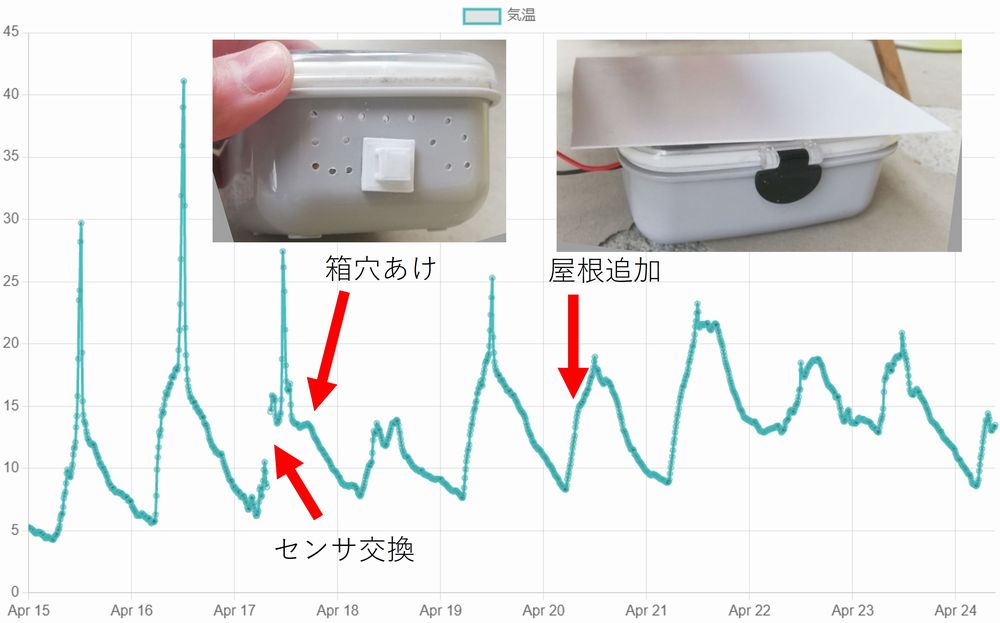
2021/9/22からベランダに設置している、太陽光発電 気象観測システムが止まることなく無事に北海道の厳しい冬を越すことができたことを前回報告させていただきました。 https://homemadegarbage.com/mkr-1010-06// 長い冬が終わり気...

Arduino MKR WiFi 1010 ベランダ太陽光発電 気象システム 無事越冬
2021/9/22からベランダに設置している、太陽光発電 気象システムが止まることなく無事に越冬できました。 https://homemadegarbage.com/mkr-1010-05// 気象システム システムのおさらいです。 A...

Arduino MKR WiFi 1010 をソーラで楽しむ 5 -8Wソーラ再測-
前回はバッテリ配線を修正し、ダイソーのガーデンライトソーラでの運用結果を報告いたしました。 https://homemadegarbage.com/mkr-1010-04/ ここでは8Wソーラで再実験いたしましたので報告いたします。 8Wソーラで気象データ測定システム再実験...

Arduino MKR WiFi 1010 をソーラで楽しむ 4 -ダイソーのソーラ再測-
前回は8Wソーラで運用したArduino MKR WiFi 1010気象データ測定計の温湿度センサの変更を報告いたしました。 https://homemadegarbage.com/mkr-1010-03#%E6%B8%A9%E6%B9%BF%E5%BA%A6%E3%82%BB%E3%83%B3%...

Arduino MKR WiFi 1010 をソーラで楽しむ 3 -温湿度センサ変更-
前回はArduino MKR WiFi 1010を充電・駆動するダイソーのカワイイ ソーラパネルをガチの8Wパネルに変更して運用してみました。 https://homemadegarbage.com/mkr-1010-02/ [amazonjs asin="B07FYFF5YZ" locale=...
Arduino MKR WiFi 1010 をソーラで楽しむ 2 -ソーラパネル変更-
前回はArduino MKR WiFi 1010をダイソーのソーラーで駆動して 気象データ測定計としてベランダに配置して運用してみました。 https://homemadegarbage.com/mkr-1010-01/ [amazonjs asin="B07FYFF5YZ" locale="...

Arduino MKR WiFi 1010 をソーラで楽しむ 1 -ベランダ気象データ測定-
今夏 Arduino MKR WiFi 1010が国内でも購入できるようになりましたね。 2, 3年前にでた製品だと思うのですが技適で発売が遅れに遅れたんでしょうね。恐らく。 [amazonjs asin="B07FYFF5YZ" locale="JP" title="Arduino MKR W...
ハムスター用 回し車カウンター製作
HomeMadeGarbageに新たなメンバーが増えました! ゴールデンハムスターの「もち」ちゃんです(*´ω`*) かわいい 回転はホール素子で検出とか 4つ角にロードセルで動向検出とか 夢広がる pic.twitter.com/4Fy4eJu4C5 — HomeMadeGar...
電子工作 2021.5.7 お父ちゃん ![]()
MakePython ESP32 Color LCD で 動画をWiFi受信 ー ScreenShotReceiver ー
前回は Makerfabs 様よりいただいたMakePython ESP32 Color LCDの ディスプレイにLovyanGFXライブラリをもちいてアニメーションを表示してみました。 https://homemadegarbage.com/makerfabs02 せっかくESP32が搭載さ...
IoT 2020.5.31 お父ちゃん ![]()
Blynk 新ウィジェット Image Gallery
いつのまにやらBlynkに新たなウィジェットが追加されておりました! Image Galleryといって、なにやら画像をコントロールできるとのことで早速試してみました。 🎉 New #Blynk build has arrived Blynk is rolling out a new ve...

Blynk で ESP32 と ESP8266 同時制御 -球体POV製作への道 その9-
またもや前回から大幅に時間があいてしまった。。。 そういう訳で球体POV(Persistence of Vision) 製作の時間です。 残像で映像を生成する装置です。 回転部と固定部を無線で情報やり取りしてみたいという発想です。はい。 前回は改めて制御マイコンから見直してWiFiとBLEを...
電子工作 2017.10.19 お父ちゃん 

Raspberry Pi Zero W 単体でラジコンカー自作
前回Raspberry Pi Zero Wでサーボモータを制御してみてラズパイでなにかしらを制御するのはシンドいなぁという感想を得たのですが。。。デジタル信号制御なら問題ないだろということで、I2C入力のモータドライバでラジコン作りました。 https://homemadegarbage.com/...
Raspberry Pi / 電子工作 2017.9.23 お父ちゃん
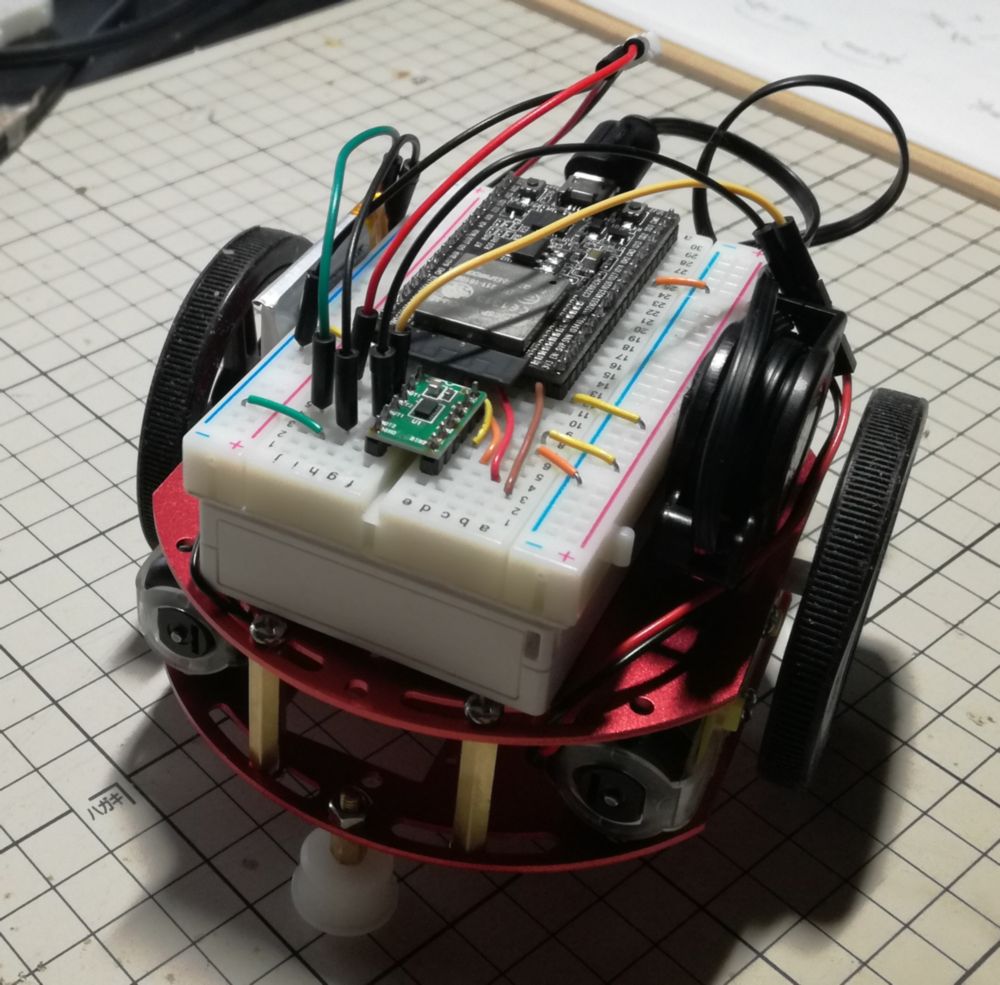
ESP32 と Blynk と 円形ロボットシャーシキット と
かわいい円形ロボットシャーシキットをAdafruitで購入したので、ESP32載っけて Blynk でWiFiラジコンつくりました♪ 構成 部品 BLE、WiFi内蔵マイコンボード ESP32-DevKitC [amazonjs asin="B06XWP81GP" locale...
電子工作 2017.9.17 お父ちゃん