二足歩行ロボット SHISEIGYO-2 Walker 改 の検討1
前回は足首にモータを追加して旋回動作を確認しました。
1軸のホイールによるバランスでは旋回動作が難しいという結論を得ましたので、
ここでは2軸の検討を実施しました。
目次
2軸での検討
2軸のホイールのバランスによる歩行は “SHISEIGYO-2 Wlaker” で確認済です。
SHISEIGYO-2 Wlaker では小さな足による歩行でしたので、ここではもう少し人間に近い足を目指し、
前後進・旋回運動の実現に向けて検討します。
2軸によるバランス検証
人間らしい足の製作の前に2軸ホイールによってどれほどの高さまで安定倒立が可能であるかを確かめました。
足長さ 30 mm
30mm pic.twitter.com/POr5zdedmh
— HomeMadeGarbage (@H0meMadeGarbage) March 13, 2023
足長さ 48 mm
48mm pic.twitter.com/dTDcx7fKHs
— HomeMadeGarbage (@H0meMadeGarbage) March 13, 2023
足長さ 58 mm
58mm pic.twitter.com/ZMRqOXvxAI
— HomeMadeGarbage (@H0meMadeGarbage) March 14, 2023
足長さ 68 mm
68mm pic.twitter.com/405IRxarYc
— HomeMadeGarbage (@H0meMadeGarbage) March 14, 2023
足長さ 78 mm
78mm pic.twitter.com/WXsvohbhCS
— HomeMadeGarbage (@H0meMadeGarbage) March 14, 2023
足長さ 88 mm
88mm pic.twitter.com/LQJQE2Qno7
— HomeMadeGarbage (@H0meMadeGarbage) March 14, 2023
結論
以上の結果より、足の長さは80mm以下にする必要があることが分かりました。
足の製作
2軸ホイールによる安定性が確認できましたので、足の製作に取り掛かります。
まずは乱暴に以前 SHISEIGYO-1 Walker 参 用に制作した平行リンクによる足をつけてみました。
インダストリアル pic.twitter.com/TeMurIpk7r
— HomeMadeGarbage (@H0meMadeGarbage) March 14, 2023
足が高すぎて倒立は出来ませんでした。。当然
足高すぎで立たない
コンパクトにしないと
目標直立で80mm pic.twitter.com/jm6IFq8BSk— HomeMadeGarbage (@H0meMadeGarbage) March 14, 2023
足の小型化
2軸向けに足を小型化しました。
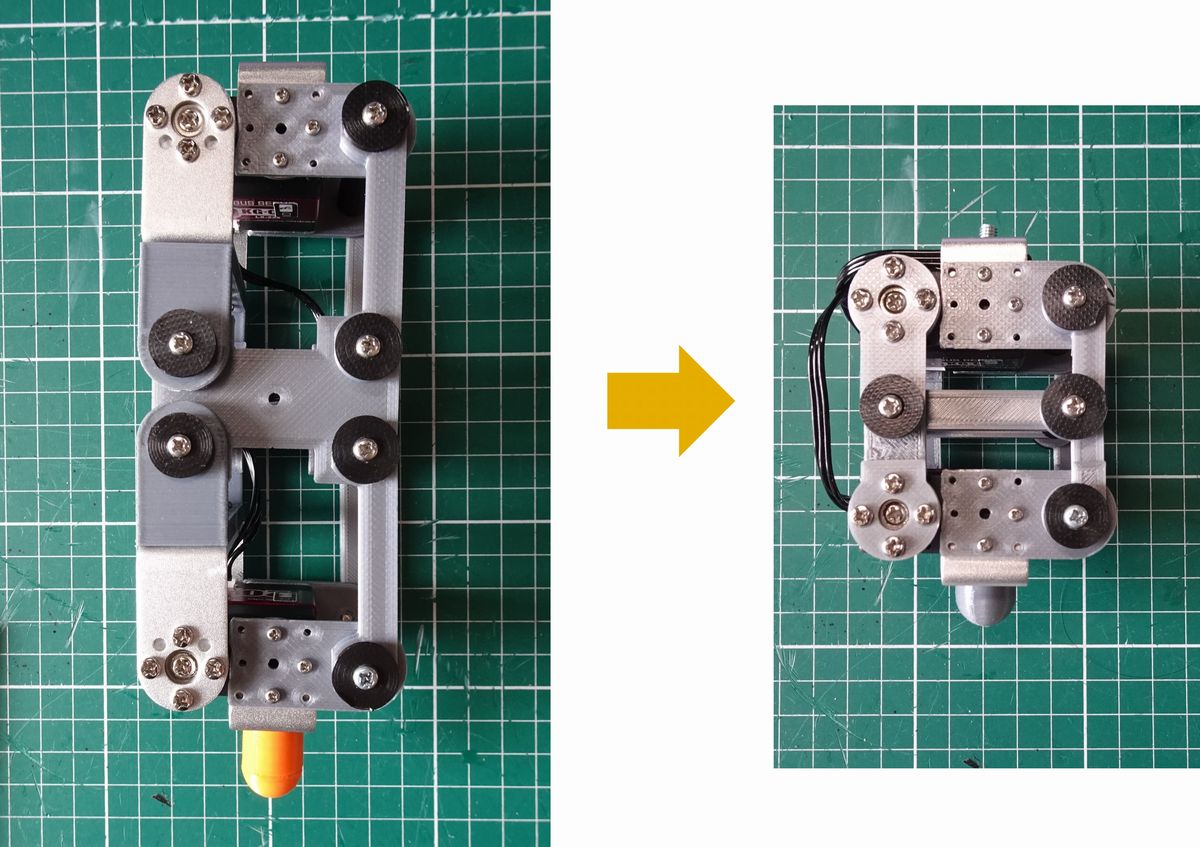
新しい足 pic.twitter.com/CKwTF2xful
— HomeMadeGarbage (@H0meMadeGarbage) March 15, 2023
片足倒立
製作した足で倒立動作の確認を行いました。
無事に片足での倒立と屈伸運動を確認することができました。
もう一足製作
2足にするべく もう片方製作。
うむ#Robotics pic.twitter.com/HrUGBmy3FS
— HomeMadeGarbage (@H0meMadeGarbage) March 19, 2023
SHISEIGYO-1で歩行テスト
製作した2足を2軸で展開する前に、1軸のSHISEIGYO-1 で動作検証しました。
動作バッチリでしかもカワイイ!
足の小型化によって重心も低くなり、安定度も向上しましたww
うちの子だって外乱テスト pic.twitter.com/KrrOA7cLhP
— HomeMadeGarbage (@H0meMadeGarbage) March 19, 2023
おわりに
ここでは2軸のフライホイールによるバランスで倒立する2足歩行ロボット “SHISEIGYO-2 Walker 改” の実現に向けて足の製作を実施しました。
片足での動作と1軸ホイールバランスによる二足歩行動作を確認できました。
次回は2軸ホイールによるバランスでの二足歩行を目指します。