卓上小型ロボット犬の歩容研究
本記事にはアフィリエイト広告が含まれます。
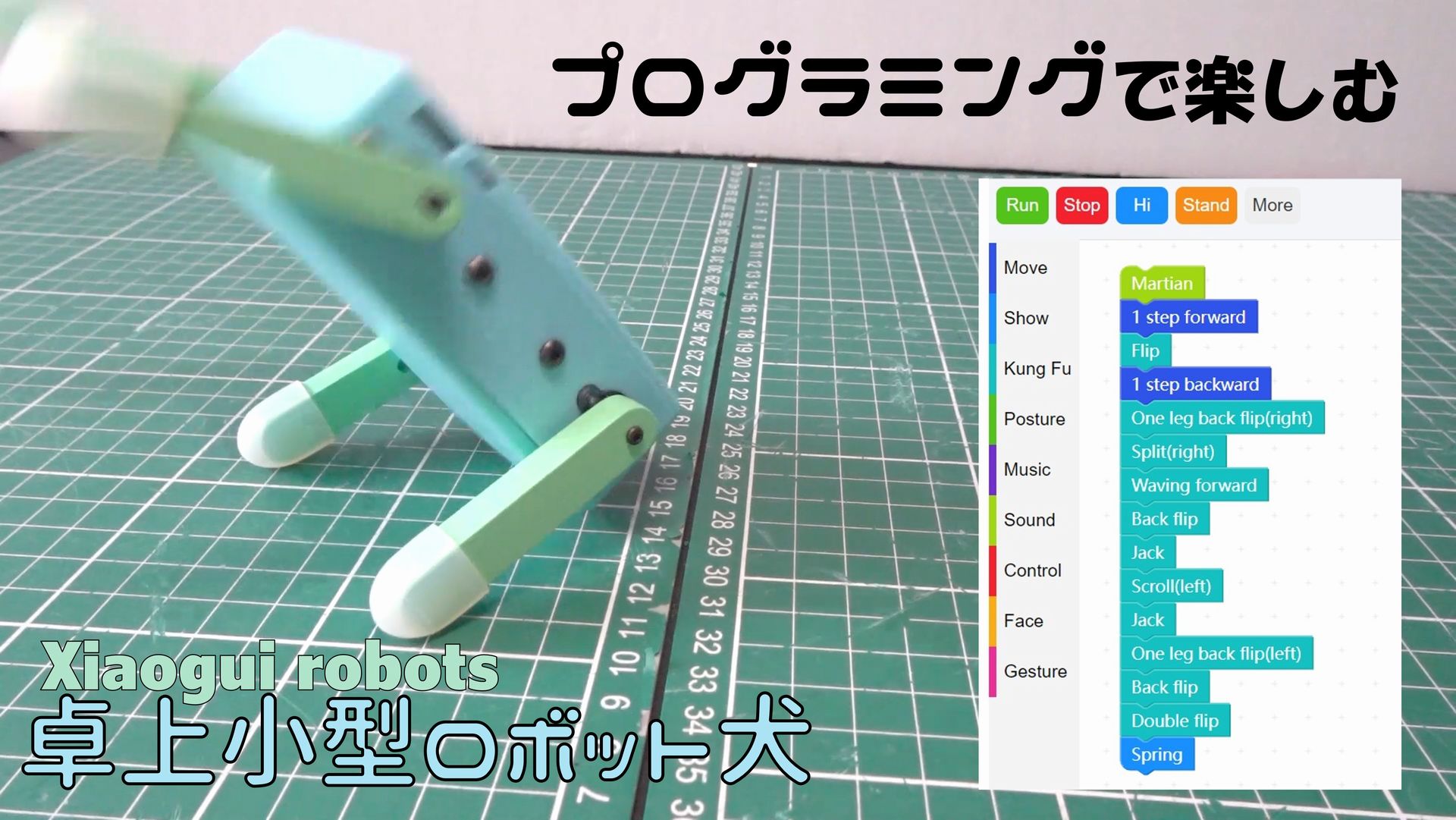
前回はブロックプログラミングでロボット動作の確認を実施しました。
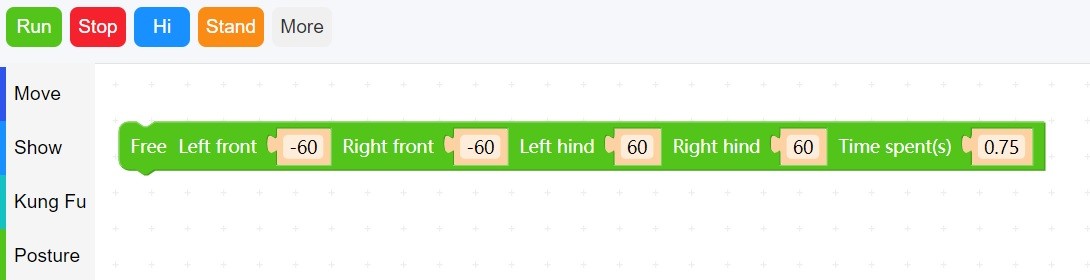
ここではサーボの角度を指定するブロックでロボット犬の歩容を勉強します。
歩容
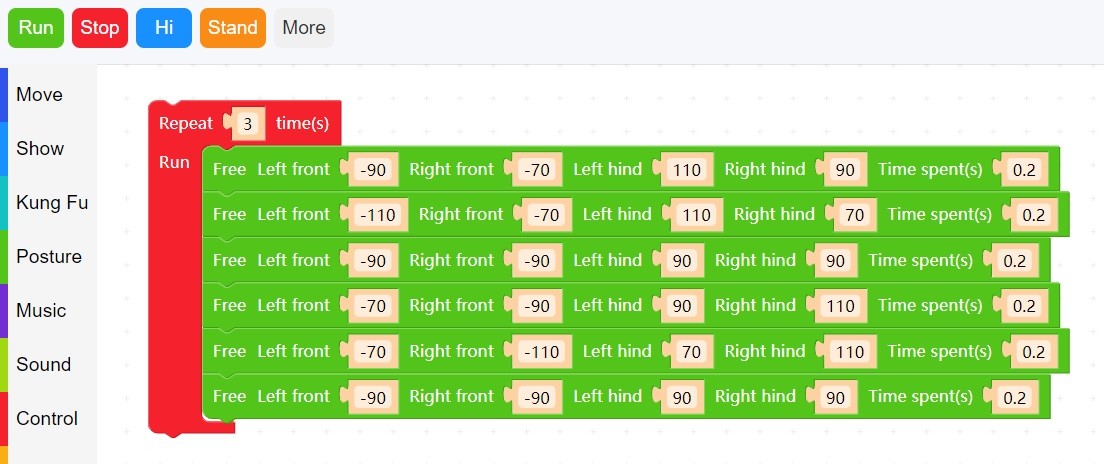
さっそく前進のプログラムを組んでみた。
歩容の研究
これが基本的な考え方だと思うんだよなあ#Robotics pic.twitter.com/DJerJ0HVgx— HomeMadeGarbage (@H0meMadeGarbage) August 2, 2023
対角の2本の足を上げて、他方の対の足をかいて前へ、上げた足を戻して前へ、足を変えて同様に繰り返してみました。

機体のバランスがいいのでこれでも前進は出来ていますね。
xiaogui robotsの歩容と比較してみると。。
本家のほうがスムーズな足運びですね。
前にも言及したけど本家の全身歩行は3拍子で動いているのよね。
前進 歩容
どう思われます?
なんか3拍子で歩いているのですが pic.twitter.com/Lognvn7GNb— HomeMadeGarbage (@H0meMadeGarbage) July 31, 2023
もうすこし、動作を最適化して本家に近づけたいです。
歩容2
若干歩幅を狭めて交互に半歩ずつ進むようなイメージで
歩容の研究
これどうだろう?欲張らずに交互に半歩ずつ歩く感じ
3拍子で歩いている pic.twitter.com/ohZHbSPWi5— HomeMadeGarbage (@H0meMadeGarbage) August 3, 2023
なかなかいい感じになった。機体のブレも小さくなったし。
もう少し足に角度をつけて機体高さを下げて、足の体側への入り込みも調整して押さえれば本家に近づけそうです。
おわりに
ここではブロックプログラムによる前進歩行の研究について記載しました。
ハードやアプリが素晴らしいので非常に勉強になります。
引き続きスムーズな歩行や旋回動作の勉強をしていきます。
それではまた