ヒザなし4足ロボットの検討
本記事にはアフィリエイト広告が含まれます。
最近Twitter TL上で、ヒザのないシンプルな棒の足をした4足歩行ロボットをよく見かけます。
— 動物のおもしろ動画 (@nekonyan_dm) February 8, 2023
My robot dog named xiaogui new erha from china pic.twitter.com/4AO82tvSWa
— Robot XiaoGui (@wgy421) January 21, 2023
しっかりと制御された歩行がなされています。
しかし、こんな足でどうやって歩いてるんだろう?と疑問に思いました。
ヒザなしでトロット歩容してもその場で滑るだけな気がしますし、なにか前後の足でタイミング変えてうまいことやってるのかもしれません。
そこでここではヒザなし4足歩行ロボットについて検討いたしました。
目次
4足歩行
私は4足歩行をミニぷぱで学習しました。
歩幅大きくしても安定してる気がする
次はコノ新しいクックで散歩だな pic.twitter.com/YoMuRh0IxY
— HomeMadeGarbage (@H0meMadeGarbage) June 9, 2022
上のように対角線上の足を同期させて歩く”トロット歩行”では、足を上げて移動させて、接地してる足で駆けています。
歩行時には足を上げて移動させる必要があるのですが、これはヒザがないとできませんよね?
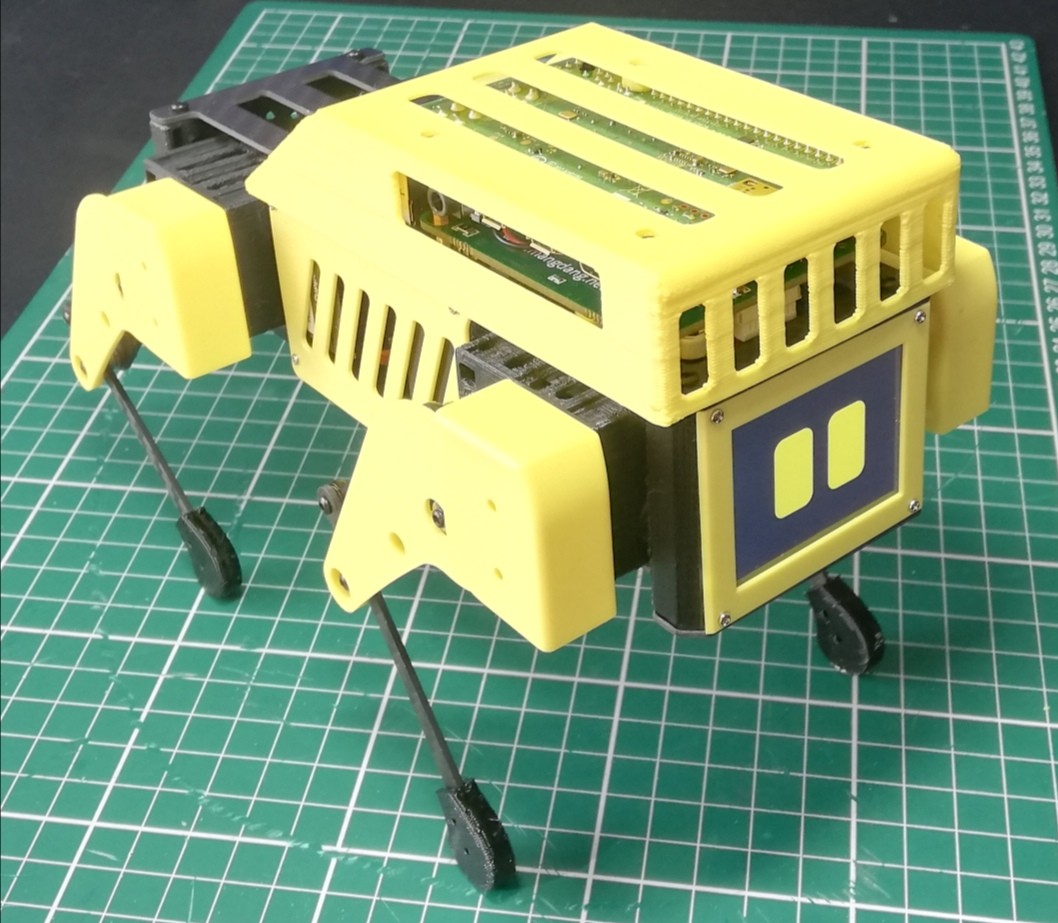
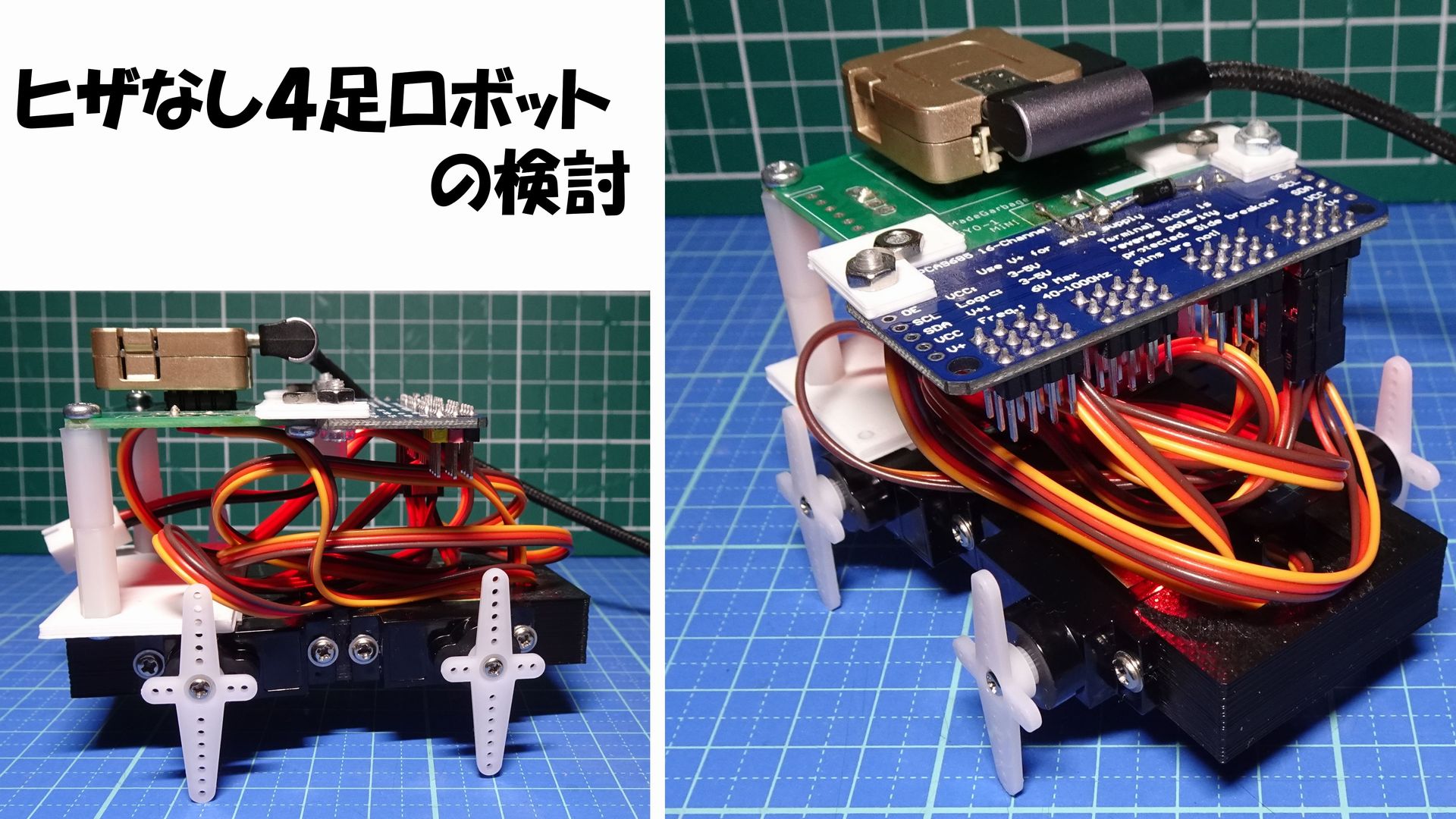
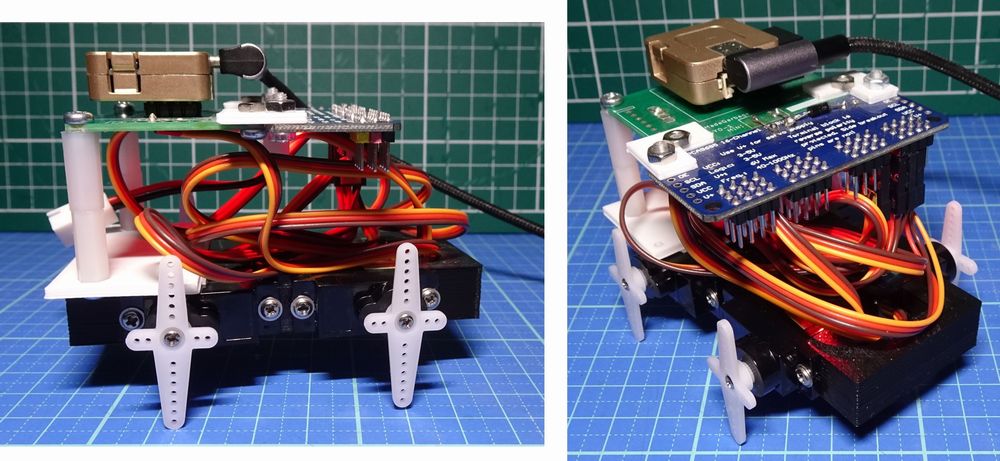
検証用4足ロボット
考えてもわからないので実際に作りました。
間違えたトロット動作はこの動画 pic.twitter.com/Qy5uX6QXsG
— HomeMadeGarbage (@H0meMadeGarbage) February 8, 2023
ATOM LiteにPCA9685モジュールを接続してサーボ4個を制御します。
ちょっと不格好ですが、検証用マシンができました。
早速、トロット歩行させてみましたが、やはり歩行できませんでした。
単純にトロット歩容しても滑って動かない pic.twitter.com/U23t4AG8fI
— HomeMadeGarbage (@H0meMadeGarbage) February 8, 2023
ヒザなしでの4足歩行には何か工夫が必要のようです。
歩行検討
ここで非常に有益な情報をいただきました。
後ろ足は常に擦っていてロール軸の傾け担当、前足が推進担当だと思います。重心を後ろ気味にしているのではないでしょうか。違ったらすみません。
— t_nakamura (@tnakamu81584280) February 8, 2023
なるほど!! 前後でロールと推進と役割を変えて歩いている可能性があるんですね!
きっと間違いない!
ということで検証。
後ろ足を下げて、重心を後ろにして
後ろ足をバタバタすると教えていただいた通りロール軸が傾き前足が交互に浮く!!浮いてる間に足を移動させて設置時に地をかけば歩けるかも!https://t.co/n0ELC1lLlE pic.twitter.com/Ax9II9GZoi
— HomeMadeGarbage (@H0meMadeGarbage) February 8, 2023
確かに後ろ足を下げて、重心を後方にしてバタバタすると教えていただいた通りロール軸が傾き前足が交互に浮く!!
浮いてる間に足を移動させて接地時に地をかけば歩ける!
歩行できた
歩いた!
機体の重心バランスが悪いのと電源コードが邪魔だけど後ろ足でロールして浮かせた前足を素早く移動させて他方の接地した前足で駆ける。
後ろ足と前足は役割が違うのね。
それを意識して制御すればヒザ無くても歩くのね。
また一つ勉強になった。 pic.twitter.com/HYDTZNl0fk— HomeMadeGarbage (@H0meMadeGarbage) February 8, 2023
後ろ足を低い状態で周期的にバタつかせて、前足を浮いてる時と接地している時で進みたい方向に足を素早く動かすことで歩行ができました!!
いただいた助言通り前後でロールと推進と役割を持たせれば歩けることがわかりました。
これはヒザありのトロット歩行では考えないやり方だわ。
助言をくださった t_nakamuraさんはロボット関連の書籍を複数出しており
私のロボット歩行のデビューとなった本の著者様でもあります。
電子書籍もあり非常に参考になります。
おわりに
ここではヒザなし4足ロボットの歩行について考えました。
助言をいただき実機で確認することで理解することができました。
これは頭の分 重心が前にあって
前足でロールして後ろ足で進んでるね。
今なら理解できる https://t.co/vzMfzuvafA— HomeMadeGarbage (@H0meMadeGarbage) February 8, 2023
以下、本検討のまとめ動画です。