次期モデル Mini Pupper 2 でIMUセンサを堪能
本記事にはアフィリエイト広告が含まれます。
前回はサーボのトルクフィードバックやポジションフィードバックを味見しました。
ここでは毎度やるといっていたMini Pupper 2 搭載のIMUの検証をやっとこ実施しましたので報告いたします。
目次
IMUセンサ
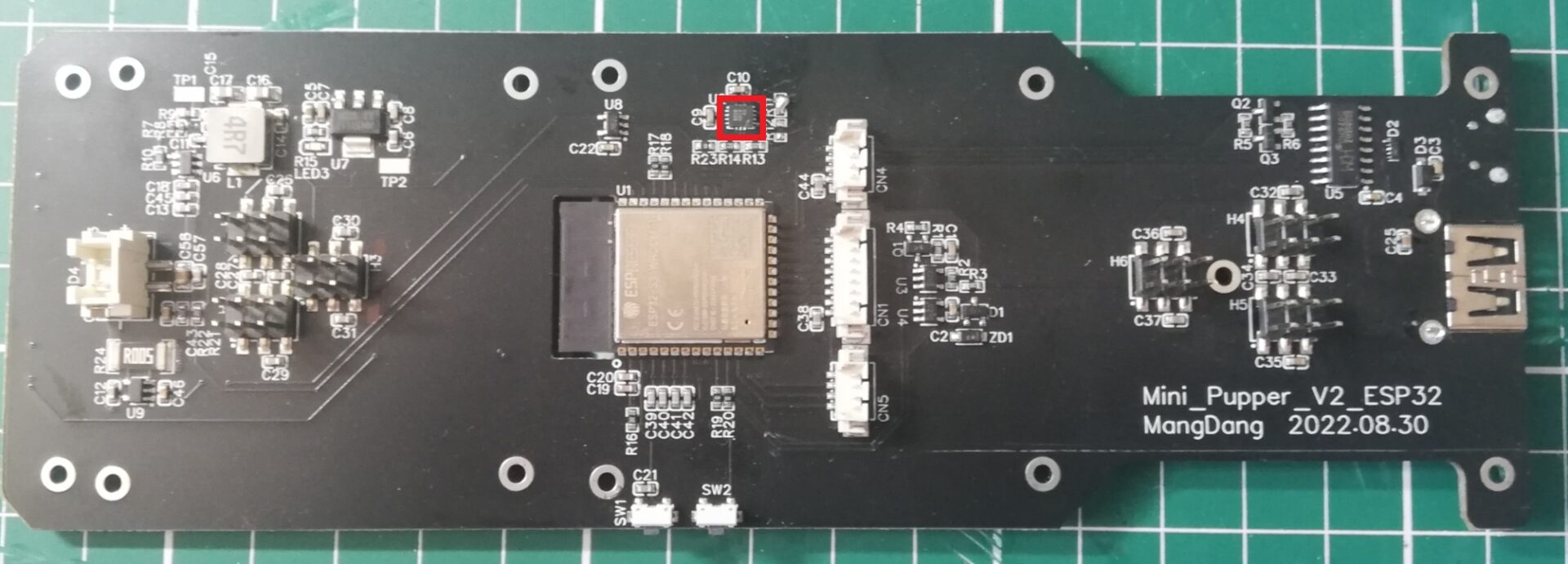
Mini Pupper 2にはESP32の他になんとIMUセンサも搭載されております。
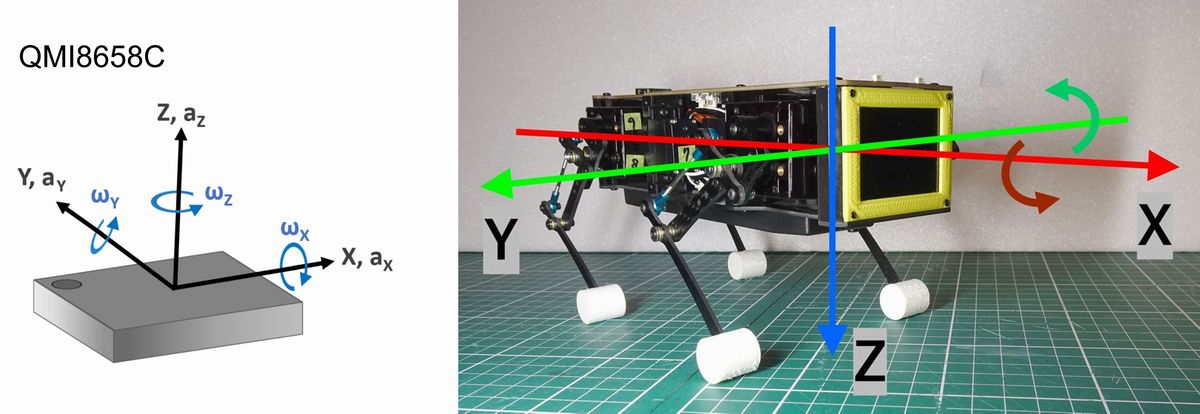
いただいたサンプル基板には 6軸 IMUセンサ QMI8658C が搭載されていました。
Arduino用サンプルをESP32で使えるようにする修正にてこずりましたが、
やっとセンサの値 (加速度3軸、角速度3軸) を取得できるようになりました。
やっとIMUの値を得ることができた#MiniPupper #ミニぷぱ #MiniPupper2 pic.twitter.com/yX7AL4iNCv
— HomeMadeGarbage (@H0meMadeGarbage) October 10, 2022
通信はI2Cを使用。
参考
平行制御
内蔵IMUの値を取得できるようになったので、以前 Mini PupperにATOM Matrix を載せて実施した平行姿勢制御を実施してみました。
前回同様にX軸、Y軸の加速度から傾きを算出して、角速度と合わせてカルマン・フィルタを通してPD制御で足の高さを制御しています。
おわりに
ここでは念願の基板搭載の6軸IMUセンサ QMI8658C の値を取得して、平行姿勢制御を楽しみました。
Mini Pupper 2にはESP32に加えてIMUセンサも標準搭載されるとのことですので、非常に楽しみです。
応用の幅も大きく広がりそうです。