次期モデル Mini Pupper 2 新規基板を味見
本記事にはアフィリエイト広告が含まれます。
前回はMini Pupper 2の初期サンプル基板搭載の6軸IMUセンサ QMI8658C の値を取得して、平行姿勢制御を楽しみました。
今回はより製品版に近い仕様であろう新規基板をいただきましたので動作確認いたします。
目次
新規基板
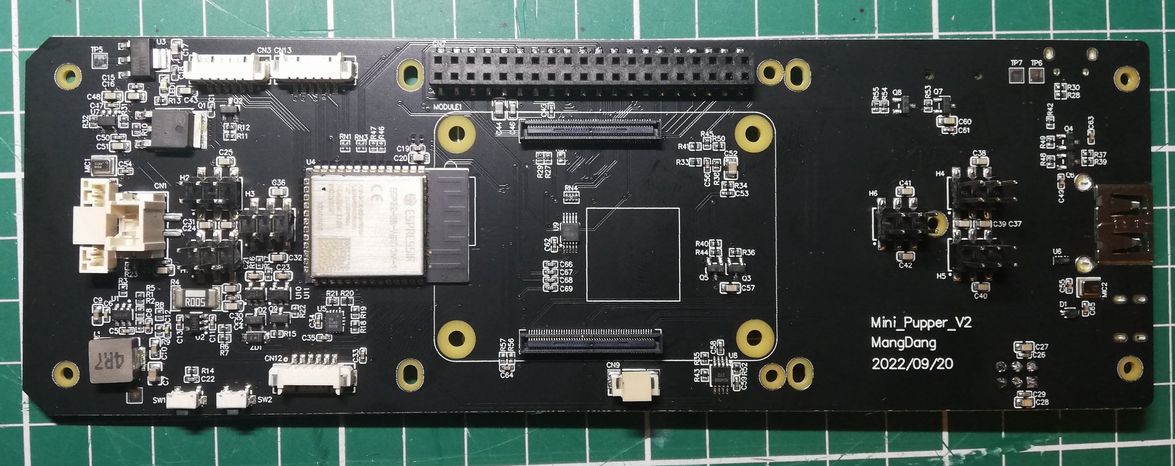
初期サンプル同様に天板が基板になっています。
大きく異なるのがRaspberry Pi 4と同じSoC搭載のCompute Module 4 (CM4)が載ることでしょう。
ここまでは正直、ESP32とラズパイの共存のイメージが湧いていなかったのですが、
この基板をみて多くのインスピレーションとアイディアが溢れている状況です。
大きく役割を分けるとラズパイでディスプレイや音声などを制御してESP32でサーボをコントロールするといった感じになっています。
Will it be interesting to ask Mini Pupper 2 to control home devices? pic.twitter.com/kSe0x2iX3z
— MiniPupper@MangDang (@LeggedRobot) September 16, 2022
ESP32とラズパイの搭載でネットワークにつながるデバイスが2個存在することになるのでかなりひろい応用ができそうです。
センサ等の拡張性も高く繋げられないものはないと言っても過言ではないでしょう。
ただ現在、私はCM4を所有できていないので融合動作を体験できないのが残念です。
入手出来次第、すぐに体験したいです。楽しみ
ESP32動作確認
新規基板でラズパイなしのESP32のみの動作確認を実施します。
初期サンプルではESP32と接続するシリアル変換ICの実装とUSBコネクタがありましたが、新規基板では直結のコネクタのみとなっていました。
馴染みのないコネクタだったのでちょっと加工してUSBシリアルコネクタと繋げられるようにしました。
いちいち手動でブートモードにする必要はありますが問題なく書き込みができました。
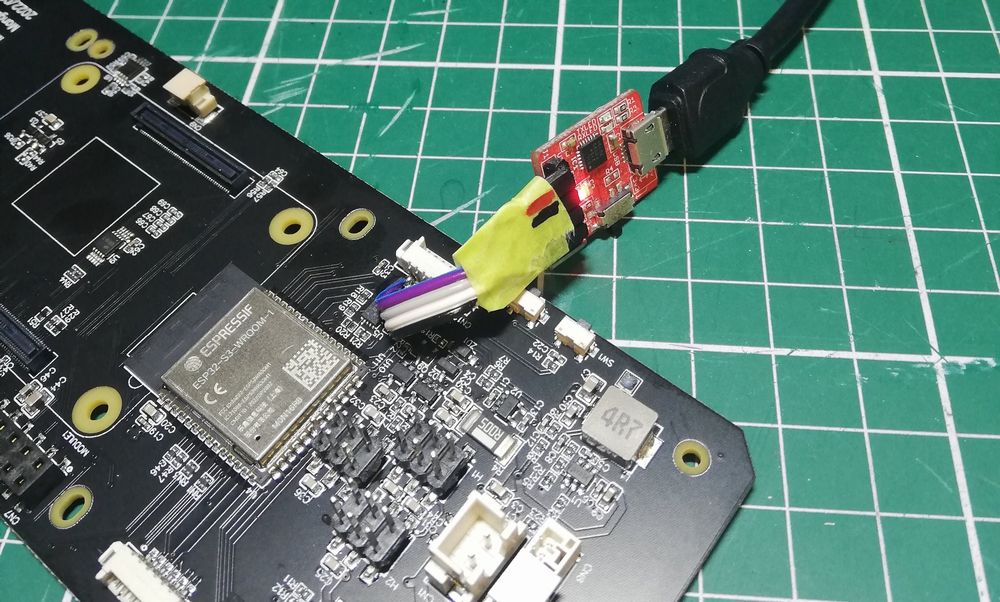
製品版ではESP32書き込み専用ケーブルが同梱されるようになると想像します。
動作
ESP32周りは大きな変更はないので、初期サンプルのコードがほぼそのまま使用できました。
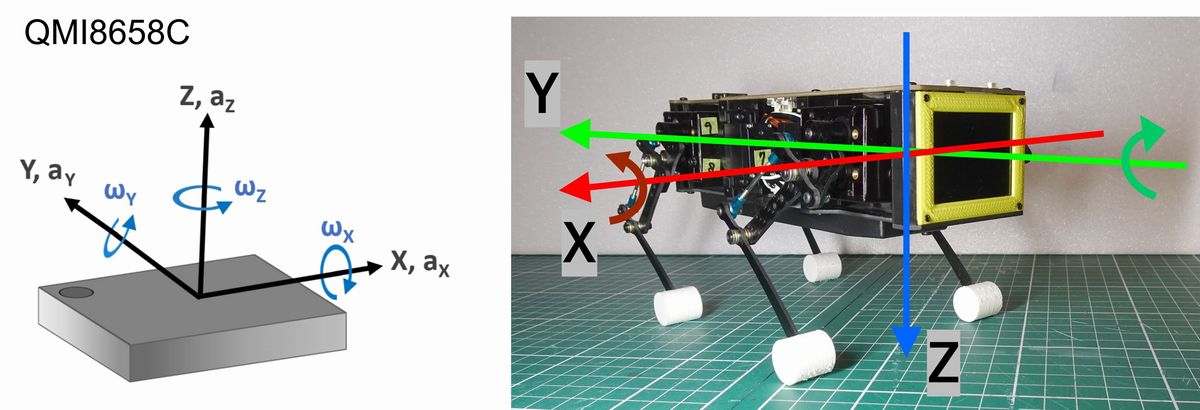
IMUセンサQMI8658C の値も取れてバランス動作バッチリです。
製品版では更に変更もあると思いますが、念のためESP32周りで初期サンプル基板と異なった点を以下にまとめておきます。
- 書き込み用シリアル変換ICとUSBコネクタの廃止
- 前方フルカラーLEDの廃止
- シリアルサーボ通信UARTピンの変更
- IMUセンサQMI8658C の実装向きの変更

おわりに
ここではMini Pupper 2の新規基板のESP32の動作確認を行いました。
とにかくラズパイとの融合動作を試したくてしょうがない状況です。
実基板をみて強くそう思いました。
これまではESP32にコントロールブラウザ画面を実装していましたが、
その辺はラズパイでやったほうが楽ですし更に高機能にもできそうです。
Mini Pupper 2はかなりおすすめのロボット犬になりそうです。
私は非常にワクワクしております。
次の記事

関連記事
 次期モデル Mini Pupper 2 でIMUセンサを堪能
次期モデル Mini Pupper 2 でIMUセンサを堪能
 ロボット犬『Mini Pupperミニぷぱ』逆運動学で足制御
ロボット犬『Mini Pupperミニぷぱ』逆運動学で足制御
 ロボット犬『Mini Pupperミニぷぱ』ESP32で歩行動作検討1
ロボット犬『Mini Pupperミニぷぱ』ESP32で歩行動作検討1
 ロボット犬『Mini Pupperミニぷぱ』を ATOM Matrix で堪能
ロボット犬『Mini Pupperミニぷぱ』を ATOM Matrix で堪能
 ロボット犬『Mini Pupperミニぷぱ』ATOM Matrix で動作再検討
ロボット犬『Mini Pupperミニぷぱ』ATOM Matrix で動作再検討
 ロボット犬『Mini Pupperミニぷぱ』を AIカメラ HuskyLens で堪能
ロボット犬『Mini Pupperミニぷぱ』を AIカメラ HuskyLens で堪能
 ロボット犬『Mini Pupperミニぷぱ』で 書道
ロボット犬『Mini Pupperミニぷぱ』で 書道
 次期モデル Mini Pupper 2 に Raspberry Pi Compute Module 4 を搭載
次期モデル Mini Pupper 2 に Raspberry Pi Compute Module 4 を搭載