バケチャンロボを実現したい我々2
本記事にはアフィリエイト広告が含まれます。
前回はお母ちゃんが発案した”バケチャンロボ”の実現を目指して、ボディや目の表示の検討を実施しました。
更に検討を進めましたので報告いたします。
目次
電子ペーパーディスプレイの収納
バケチャンの目は電子ペーパーを採用します。


またコントローラには小型マイコン M5Stamp S3 を使用することにします。だって小さいから
StampS3でe-paper pic.twitter.com/DkWweRX39y
— HomeMadeGarbage (@H0meMadeGarbage) April 23, 2023
更に変換基板を用いて電子ペーパーと基板間の結線を行いました。
[amazonjs asin=”B07H29G1Q6″ locale=”JP” title=”FPC/FFC (24ピン) フラットケーブル to ピンヘッダ 変換基盤 0.5mm/1.0mmピッチ両対応 to 2.54mmピッチ フラットケーブル信号の抽出用に”]
— HomeMadeGarbage (@H0meMadeGarbage) April 23, 2023
うまいこと頭部に収納できることを確認できました。
電子ペーパー固定#バケチャンロボ pic.twitter.com/BGJVOYXOpi
— HomeMadeGarbage (@H0meMadeGarbage) April 30, 2023
足の検討
お母ちゃんいわくバケチャンは足でチョコチョコ歩くのでタイヤの使用は避けたいとのこと
#バケチャンロボ pic.twitter.com/vWiUKSsDyn
— HomeMadeGarbage (@H0meMadeGarbage) April 29, 2023
早速足の検討を開始。
連続回転サーボを使用して、何かできないか考えます。
[amazonjs asin=”B077JFCPCX” locale=”JP” title=”Feetech FS90R マイクロサーボ 360度連続回転サーボ 6V 9G 車輪付き 2点入り RCサーボ 900us-2100us 並行輸入品”]
コレは足になるだろうか#バケチャンロボ pic.twitter.com/BD62pBnMVA
— HomeMadeGarbage (@H0meMadeGarbage) April 30, 2023
うーんコレだとサーボの回転方向を変えても、足先の運動は前後するだけだなぁ。。。
テオヤンセン
コチラを観て勉強
どうやらテオヤンセンというリンク機構が凄く良さそうだ。なんか観たことあるわ。
さっそくFusion360で実検。
ザックリ見よう見まねで設計して軽くアーム長さを調整したのみでいい感じに動いた!
テオヤンセンすげー!
こんないいものこの世の中にはあるんか
いい加減なサイズ比でもめっちゃ良く動いてる pic.twitter.com/hMKuBOjgpT— HomeMadeGarbage (@H0meMadeGarbage) May 1, 2023
サクッと3Dプリントしてみた。こりゃいいわ!
スゲーな テオヤンセン pic.twitter.com/fXP64KbRjg
— HomeMadeGarbage (@H0meMadeGarbage) May 1, 2023
もう一個つくって歩かせてみた。ちょっとバランス悪すぎ。。雑に作りすぎた。
おもてたんと違う pic.twitter.com/u3VGZbRapl
— HomeMadeGarbage (@H0meMadeGarbage) May 1, 2023
バランス調整して歩行確認。左右でキッチリ逆走で回転させたほうがいいのだろうけどこれはこれで生物感あって面白いな。
バランス整えて足先に紙やすり貼った
左右逆走で動かせばより明確に制御できそうだけど
それほどシビアにやらんでも生物感あっていいかも#バケチャンロボ pic.twitter.com/2PJIH59S4r— HomeMadeGarbage (@H0meMadeGarbage) May 2, 2023
ちなみに後方にはタミヤのボールキャスターを使用しました。
[amazonjs asin=”B001VZHRW2″ locale=”JP” title=”タミヤ 楽しい工作シリーズ No.144 ボールキャスター 2セット入 (70144)”]
おわりに
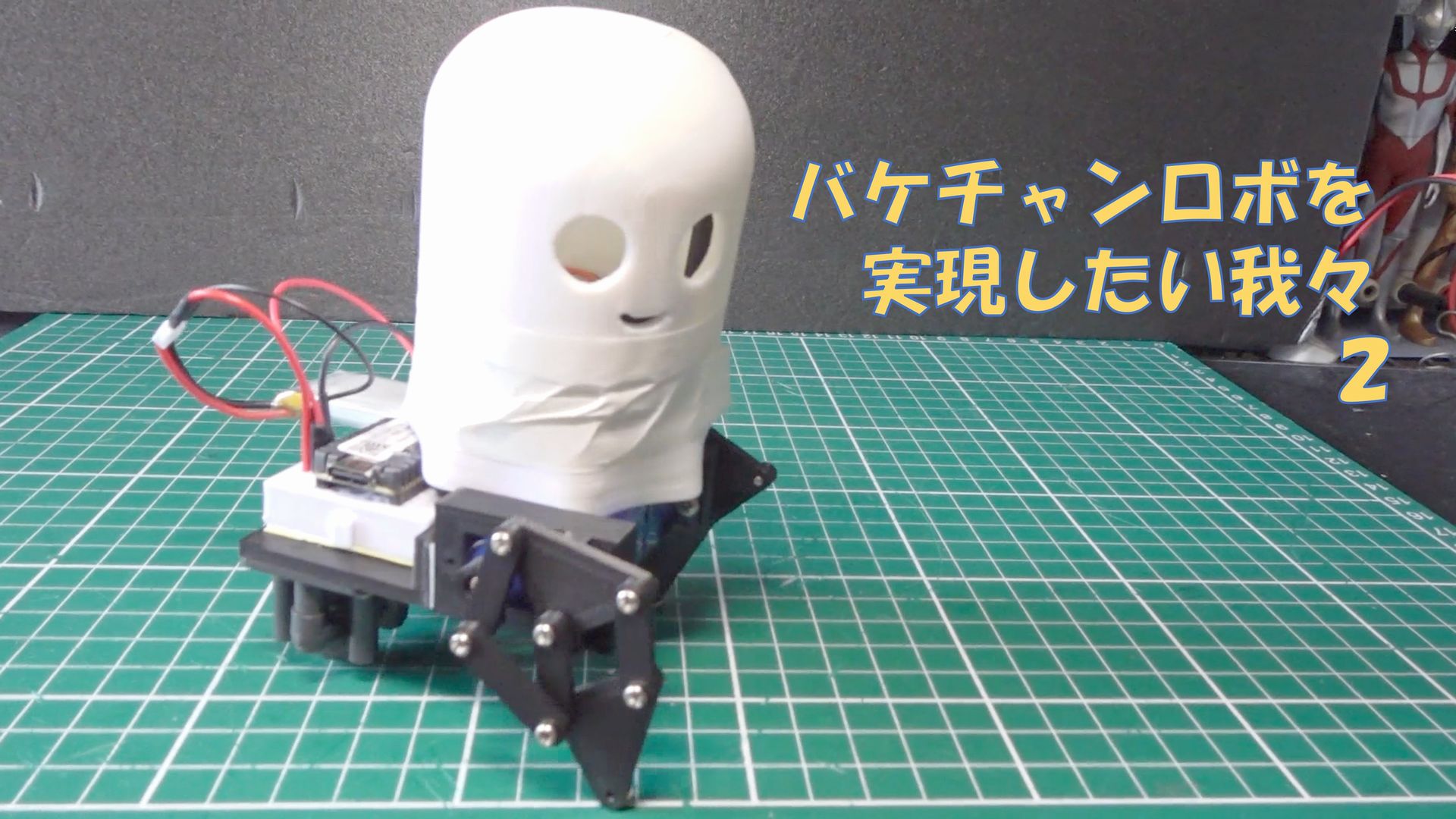
ここでは電子ペーパーのボディ収納と足の検討を実施しました。
デカすぎる#バケチャンロボ pic.twitter.com/z7gr731xWq
— HomeMadeGarbage (@H0meMadeGarbage) May 2, 2023
足はまだ大きすぎるので小型化の検討が必要です。。。
それではまた!