バケチャンロボを実現したい我々
本記事にはアフィリエイト広告が含まれます。
お母ちゃんにもっとカワイイ ロボット作れば 多くの人に喜ばれるんじゃない?と提案されたのですが。。
俺にそんなの作れるわけないだろ!それならデザインしてくれよと。
そんな経緯をラジオでも話しておりましたが
お母ちゃんのデザイン画がコチラ。。。
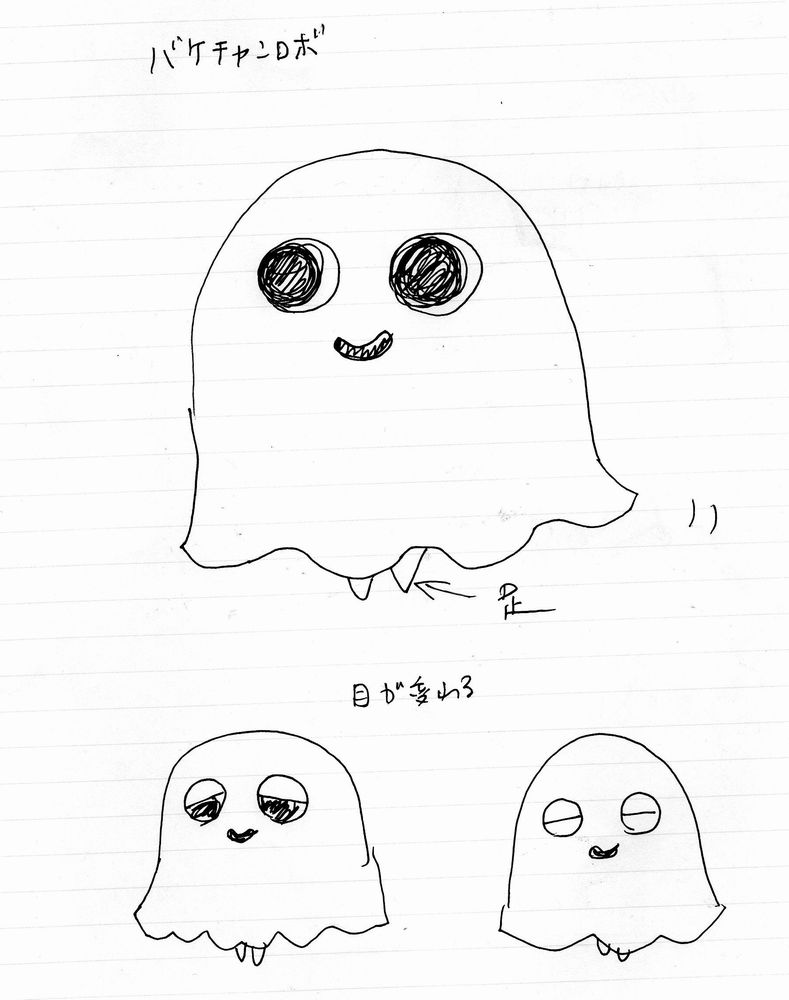
なんだこれ。。。? バケチャンロボだって。。
ま.. まぁデザインしてくれといった手前。。。製作に向けて検討を開始しますか。
目次
初期検討
目
デザイン画によるとバケチャンロボは目の表情が豊かな印象です。
まずは目について考えてみました。
スマホに目の画を表示して3Dプリントしたバケチャンロボの平面顔を載せて動かしてみた。
まーたなんかしようとしてら pic.twitter.com/Ho9iyMt8hk
— HomeMadeGarbage (@H0meMadeGarbage) March 29, 2023
あれ??? 結構かわいいぞ おい。
目は何かしらのディスプレイか可動部で黒目を用意して動かすのがよさそうです。
ボディ
バケチャンロボを3D化してプリントしてみました。
かわいい。。
賭けでサポートなしで出力したら顔の穴が少し乱れた#バケチャンロボ pic.twitter.com/bkVHjGSiH8
— HomeMadeGarbage (@H0meMadeGarbage) March 30, 2023
本格的に可愛いじゃねーか!おい
足
デザイン画によるとバケチャンロボには足があって移動するようです。
足どうするべか#バケチャンロボ pic.twitter.com/af7qPu4p3P
— HomeMadeGarbage (@H0meMadeGarbage) April 2, 2023
冗談でtoioを内部に仕込んだ。悪くないな。。。
#バケチャンロボ pic.twitter.com/J8aZELIpCP
— HomeMadeGarbage (@H0meMadeGarbage) April 7, 2023
目の検討
初期検討の時点で愛着がわき、本腰をいれて製作に取り掛かろうと思います。
まずは目。
オバケなので闇にまぎれたほうが良いと考え、ロボットの目としてよく使用されるLEDやバックライトのある液晶ディスプレイなどの自発光系は避けたいと考えました。
電子ペーパーなんか面白いかなと、フレキシブルe-Paperを購入
同社のESP32が載ったコントロールボードの配線とサンプルコードを頼りにESP32でも駆動してみた。https://t.co/f2oI8Fstka
驚いたのがサンプルの時計表示
電子ペーパーって狭い範囲ならこんなに早く表示変えれるんですね。このコードを頼りに勉強を進める。
明日からの2連休。忙しくなりそうだぜ pic.twitter.com/X8pnlc2JK4— HomeMadeGarbage (@H0meMadeGarbage) March 31, 2023

ラズパイ Pico用のコントロールボードでしたが、SPI通信でArduino UNOやESP32でも動かすことができました。
局所的に早く表示を変えることもできて、仕様によると部分的な描画は0.3秒でできるようです(全体リフレッシュ描画は2秒)。
目の動作
電子ペーパーで黒丸を描いて動かしてみました。
動かせた
電子ペーパーでも割と動くんだなぁ
ちょっと跡が残るけど#バケチャンロボ pic.twitter.com/ta7TecwPTc— HomeMadeGarbage (@H0meMadeGarbage) March 31, 2023
高速動作は難しいですが、バケチャンロボの目として採用できそうです。
薄暗い場所での見え方もバッチリです。
発光してないから暗闇では暗闇なりの見え方がする
ちょっと不気味でオバケらしさの演出の助けになる#バケチャンロボ pic.twitter.com/117Y7OiLEp— HomeMadeGarbage (@H0meMadeGarbage) March 31, 2023
ということで目は電子ペーパーで行くことにします!
#バケチャンロボ の目は電子ペーパーで決定 pic.twitter.com/7hYgsXPw3R
— HomeMadeGarbage (@H0meMadeGarbage) March 31, 2023
頭部・ボディの検討
つづいてバケチャンロボの体について検討します。
内部に電子ペーパーとコントローラを仕込み、将来的には足の機構も内蔵する必要があります。
#バケチャンロボ pic.twitter.com/DUNKRz4joI
— HomeMadeGarbage (@H0meMadeGarbage) April 1, 2023
頭部を製作して電子ペーパーを仕込んだのですが、曲げすぎて損傷を与えてしましました。。。
フレキシブルなのをいいことにいじくり倒したら画像に損傷が。。。
ディスプレイ調達して以後気を付ける#バケチャンロボ pic.twitter.com/YmdmMqUGep
— HomeMadeGarbage (@H0meMadeGarbage) April 1, 2023
ディスプレイ変更
当初購入したディスプレイ(2.9インチ)が壊れてしまったので、若干小さい2.13インチのフレキシブル電子ペーパーを購入しました。
待ちわびていた
上物の予感
取り扱えるべか。。Waveshare e inkディスプレイ – AliExpress https://t.co/BcTLquIQnq pic.twitter.com/pqytZfRS6D
— HomeMadeGarbage (@H0meMadeGarbage) April 11, 2023

2.9インチと同じコントローラで無事に動作しました。
動いた動いた
曲げるのは怖いから 明日かな。。#バケチャンロボ pic.twitter.com/JebkqnC1uQ
— HomeMadeGarbage (@H0meMadeGarbage) April 11, 2023
2.13インチ向けに頭部を小さめにして曲げてみましたが、表示に問題はありませんでした。
結構曲げても問題なかった。
今回はドライバとか載ってヤバそうな部分触らないように気を付けたからかもしれない。#バケチャンロボ #ePaper pic.twitter.com/vcR199Oy7l— HomeMadeGarbage (@H0meMadeGarbage) April 12, 2023
頭部・ボディ製作
頭部カバーを製作して動作確認
中の黒パーツいらないかな?
あとコントローラ部もっとスッキリさせないとな#バケチャンロボ #ハンニバル pic.twitter.com/8hD1CdQhNa— HomeMadeGarbage (@H0meMadeGarbage) April 12, 2023
2層の黒パーツで目が奥まってしまっているので除去して全身製作。
なーんかイマイチ。。電子ペーパーを収めるために頭の丸みをつぶしすぎちゃった。。
ボディ製作ガチ検討
ボディの3Dモデル作成時、曲面にバケチャンロボの顔を切り込む際に垂直に押し込むとエッジに深く角度がついて電子ペーパーに広く映りこんでしまいます。
(CADはFusion360使用)
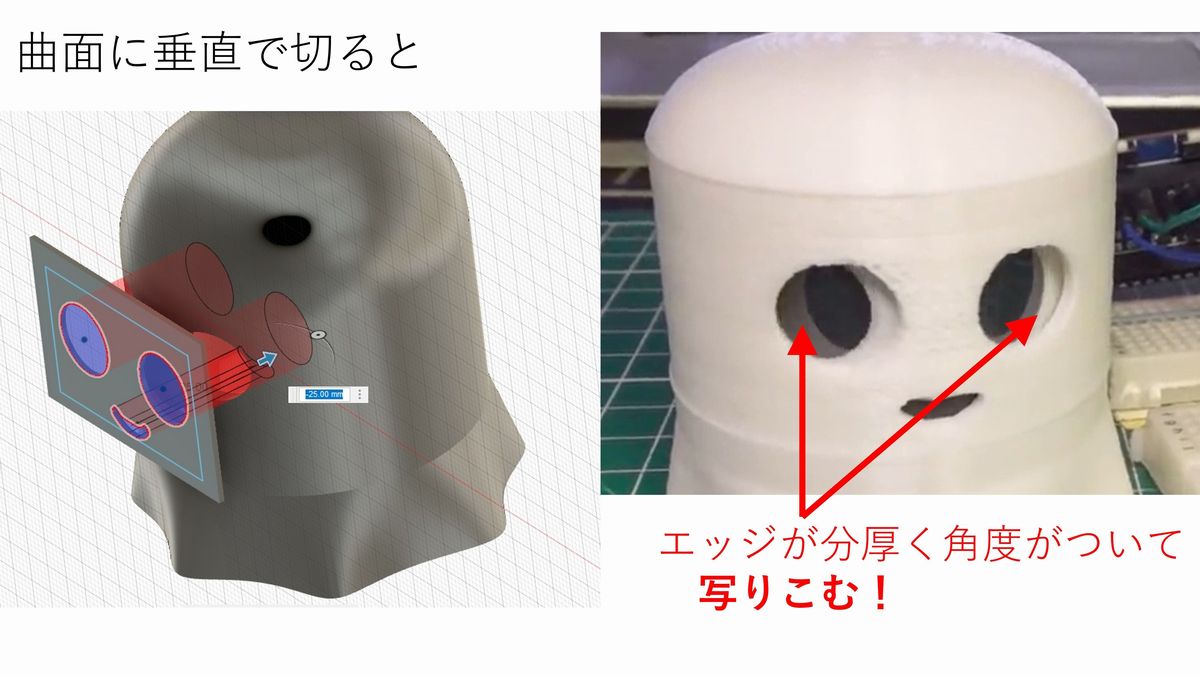
調べてみると局面にそって平面の図を加工する際には”押し出し”ではなく“エンボス”が正解のようです。
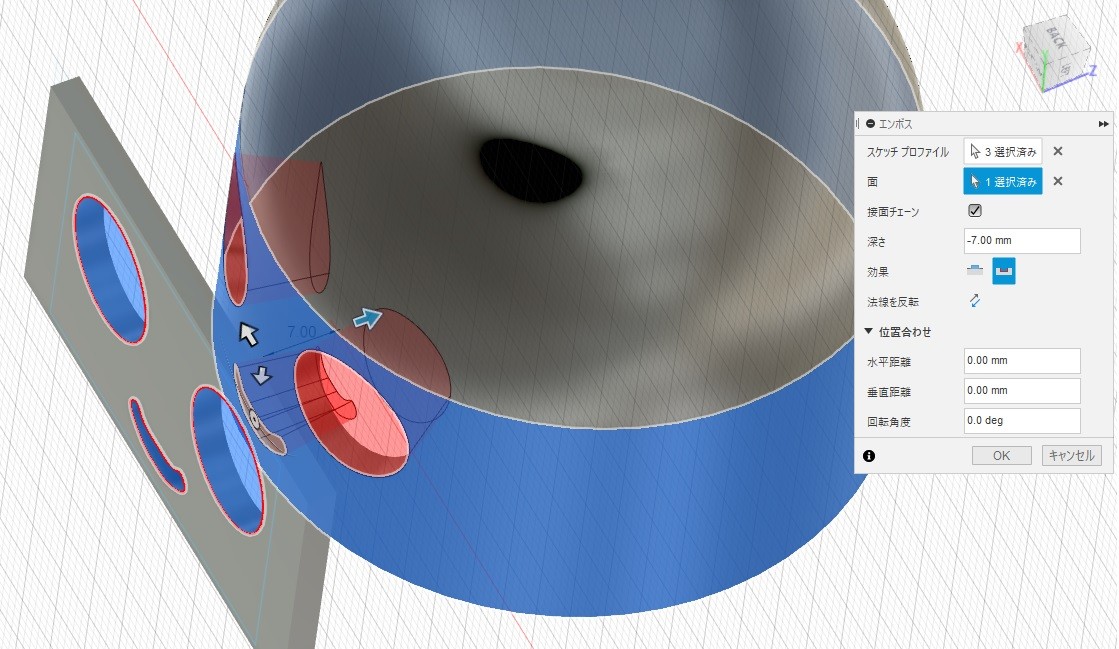
顔をエンボスで切り込んで、ボディを内部にいろいろ詰め込みやすくするためにモナカ割りで作ることにしました。
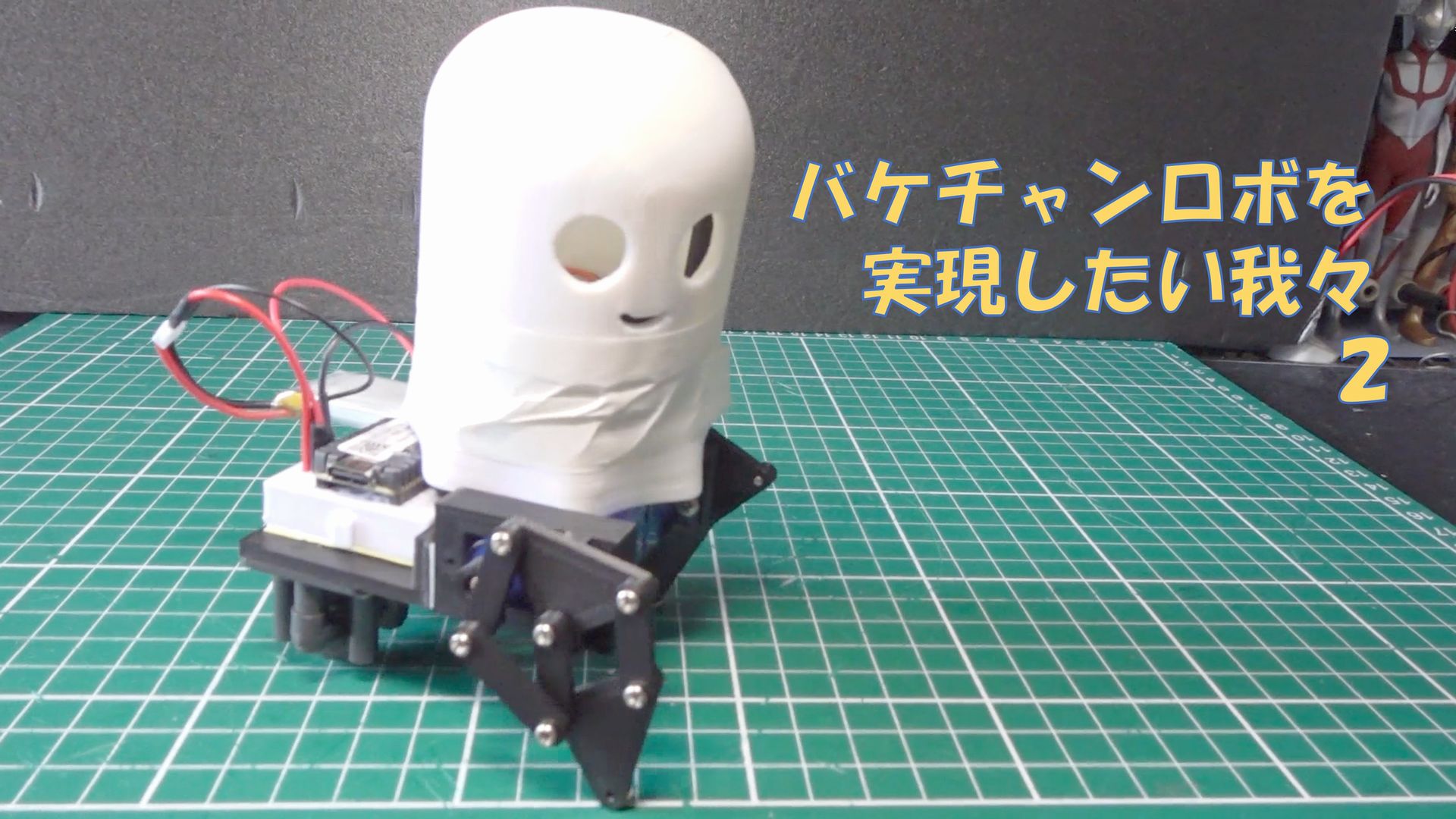
頭部の丸みも復活させまいたが、、なんかオバケというより歯の妖精みたいになってきた。。
ちょっとこれはヤスったりしてなんとかするかな 🙄
おわりに
ここではバケチャンロボの製作について報告しました。
検討を重ねるうちに愛着がわき可愛く仕上げたいという親心が芽生えました。
これからボディ内部の作りこみや足機構の検討など課題目白押しですので楽しく製作進めたいと思います。
あとバケチャンロボはしゃべるかもしれないよね。。。??