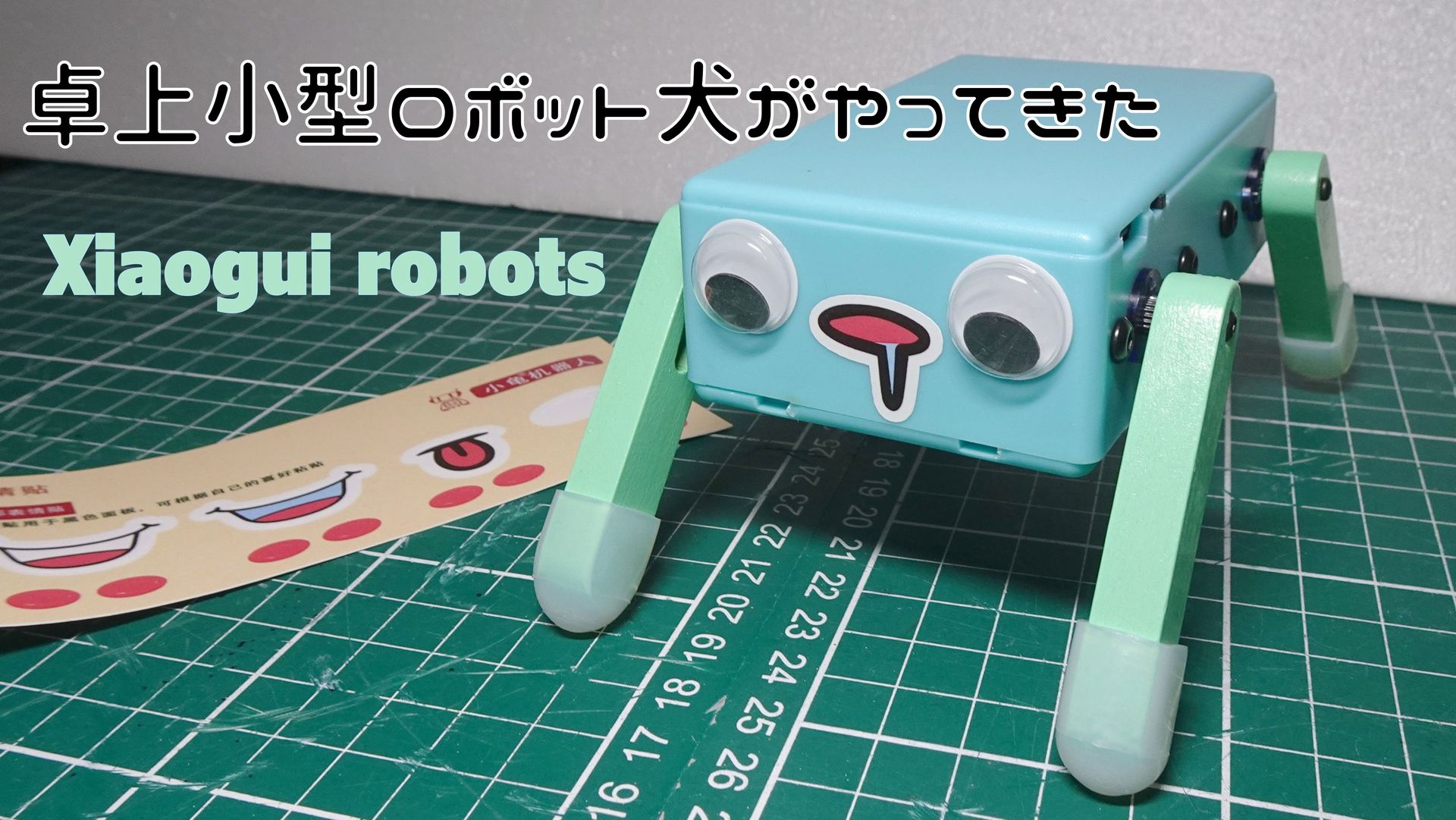
卓上小型ロボット犬がやってきた
本記事にはアフィリエイト広告が含まれます。
なんと xiaogui robots (@wgy421) 様より小型ロボット犬のサンプルを提供いただけました!!
ありがとうございます!!!

早速 組み立てて動かしましたので報告いたします。
目次
The world smallest robot dog at desktop
いただいたロボット犬はコチラです。
My robot dog named xiaogui new erha from china pic.twitter.com/4AO82tvSWa
— Robot XiaoGui (@wgy421) January 21, 2023
たった4つのサーボモータでこの動きです。凄すぎ。
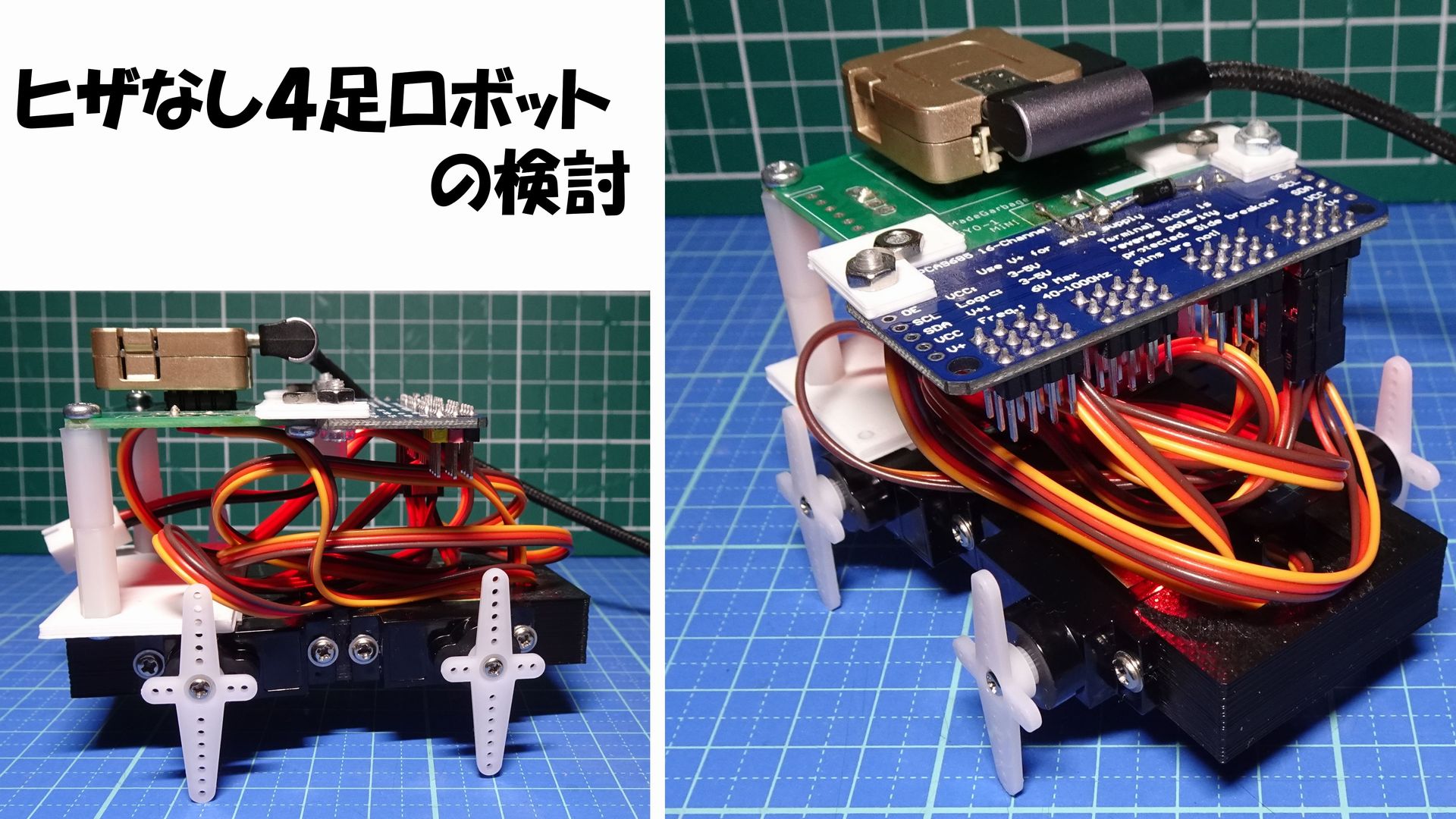
実はこの動画をTwitter (現X)で見た際に非常に衝撃を受け自分でもサーボ4つのロボットを作っていたのでした。
ですのでサンプル提供のお話をいただいたときは本当にありがたく嬉しかったです。
コチラのロボットは以下で購入できるようです。
The world smallest robot dog at desktop
組立て
開封!

可愛くてわかりやすい説明書
ハイセンスでワクワクするインスト pic.twitter.com/x6feCWAlSF
— HomeMadeGarbage (@H0meMadeGarbage) July 31, 2023
部品の包装もいちいちカワイイ!

組立てについては公式のコチラの動画も参考になります。
Making your first robot dog by your self. And programming it to finish task what you want. pic.twitter.com/dEcS8ysY6U
— Robot XiaoGui (@wgy421) June 17, 2023
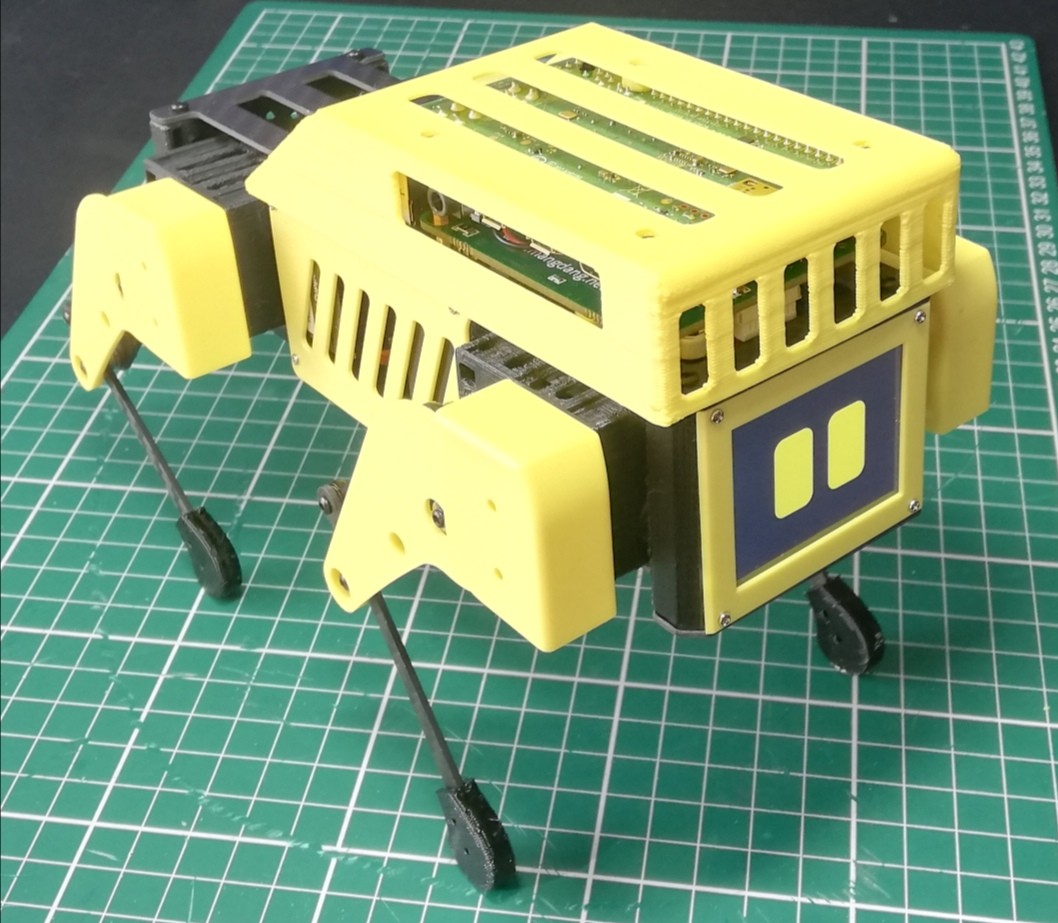
コントロール基板
コアマイコンとしてはESP32-S3が採用されておりました。
技適マークもあって一安心 ε-(´∀`*)ホッ
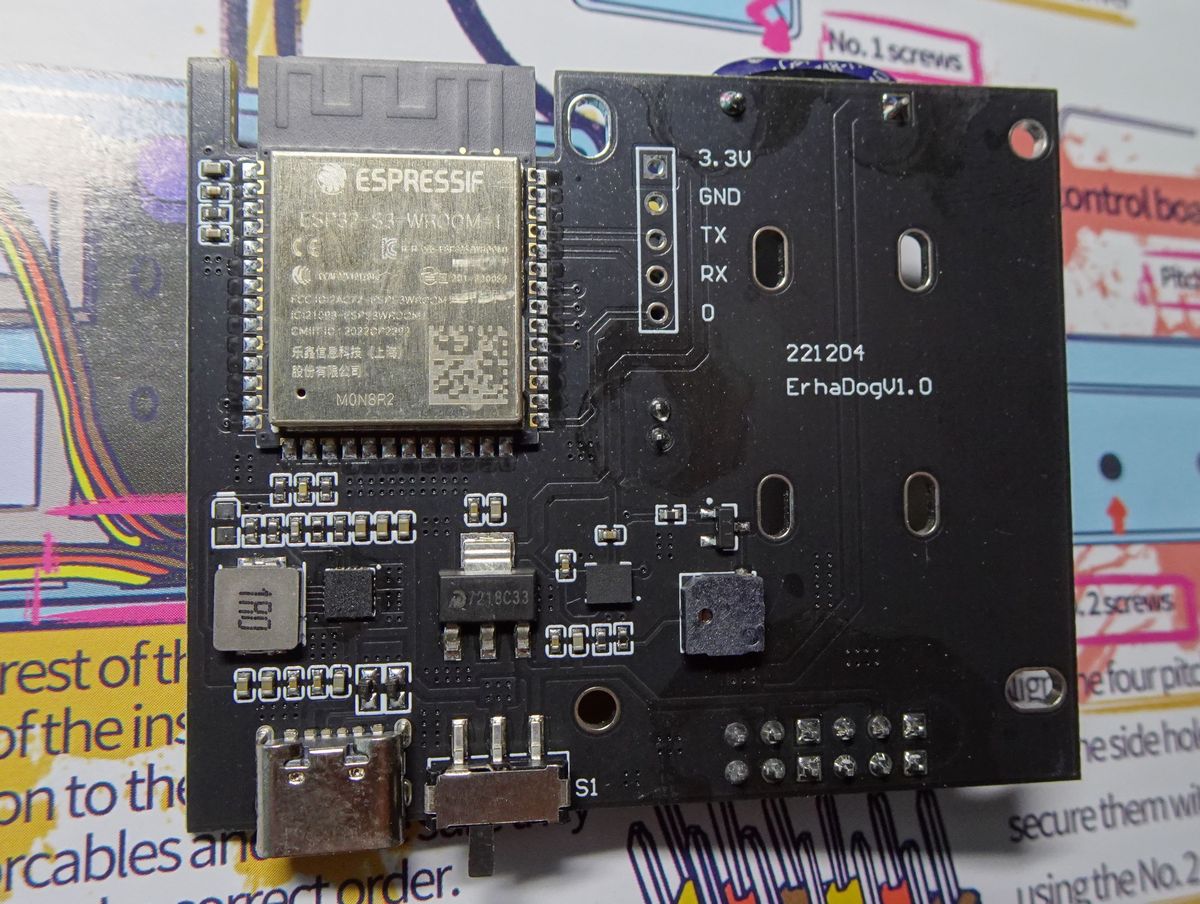
バッテリチャージコントロールICやロジック用電源LDO、ブザー、IMUセンサなどが載っているように見受けられます。
サーボ
足用の4つと予備2個の計6個 同梱されておりました。
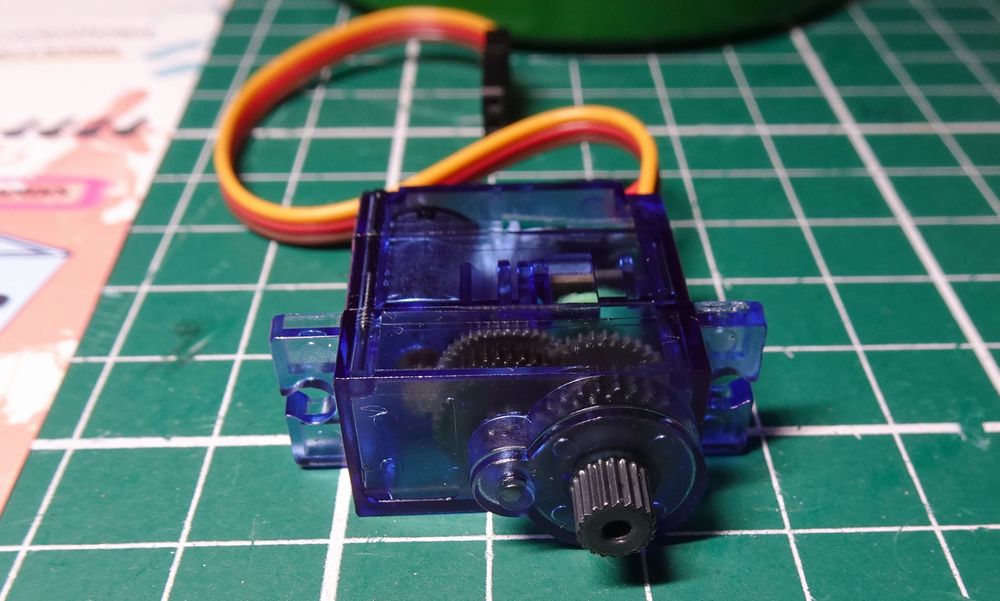
見た目はSG92Rっぽいのですが。。
— HomeMadeGarbage (@H0meMadeGarbage) August 1, 2023
可動範囲が300°ほどでとても広く、動作もスムーズな気がします。
カスタム品でしょうかね??
音が違うのよ。音が!
— HomeMadeGarbage (@H0meMadeGarbage) August 1, 2023
組立て
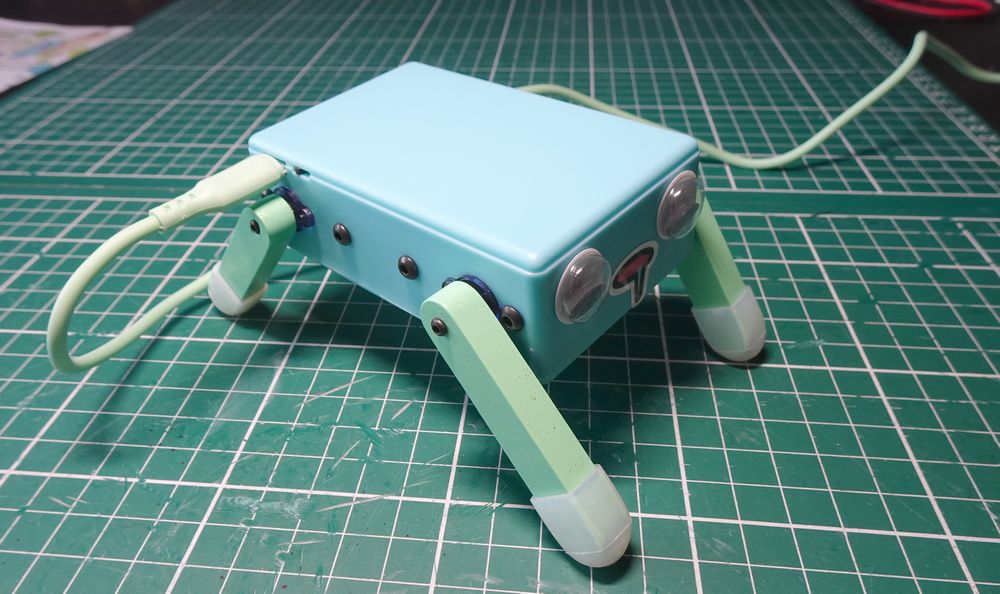
筐体に基板、サーボ、バッテリを納めました。
よし! pic.twitter.com/kqObgcFEUj
— HomeMadeGarbage (@H0meMadeGarbage) July 31, 2023
足はなんと木製。またまたカワイイ!
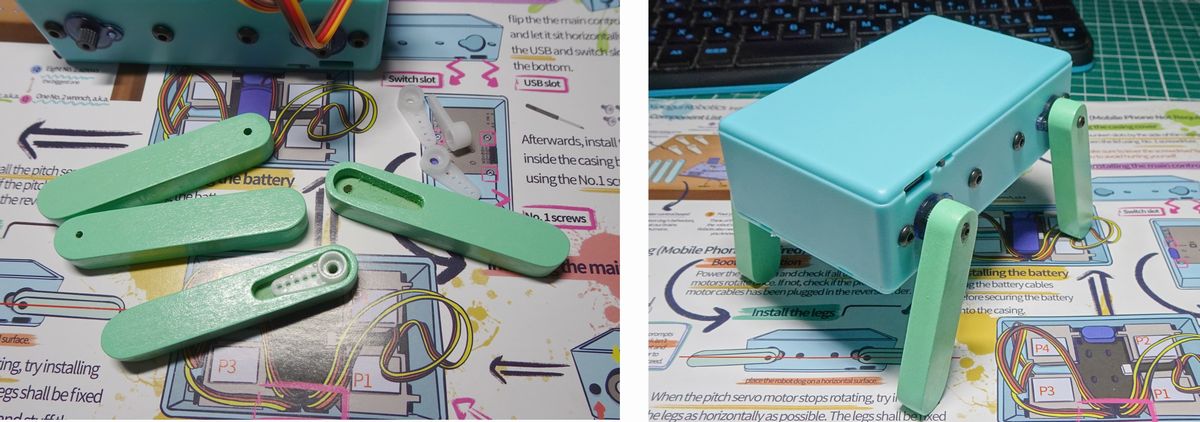
足をサーボホーンと共に固定します。
電源スイッチをONにするとサーボが動いて、しばらくすると停止します。
停止後に手足をまっすぐに伸ばした状態でネジ止めします。
非常に良く出来ているので、凄く簡単に組めました。
滑り止め用の靴と目と口のシールも用意されております。

起動
あらためて電源をONして起動
— HomeMadeGarbage (@H0meMadeGarbage) August 1, 2023
ロボットのESP32-S3をアクセスポイントとしてスマホとWiFi接続してブラウザでもろもろ設定・操作が可能となります。
起動後にスマホのWiFi設定を開いて”xiaogui-○○○○”を選んで接続します 。
接続すると自動的にブラウザアプリが開きます。
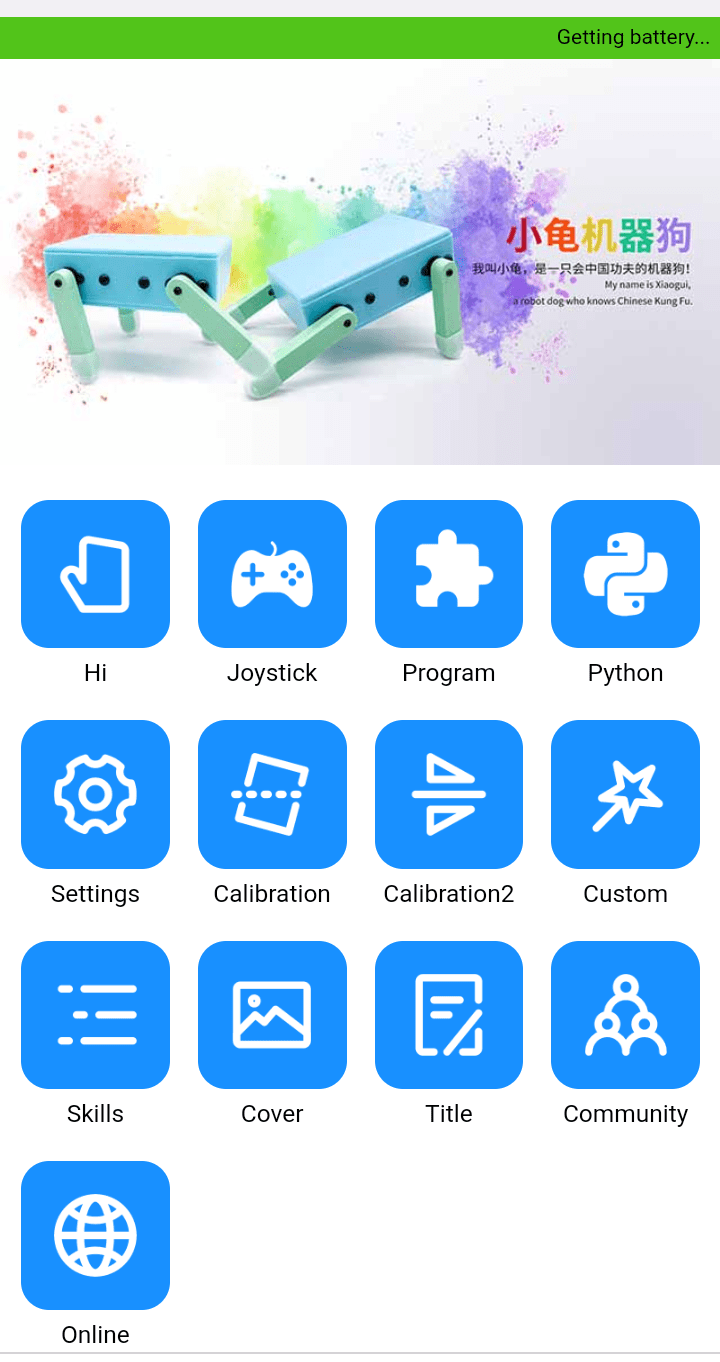
バッテリ残量も表示されて便利です。
ちなみに充電はUSB-Cコネクタから実施します。ケーブルも同梱 (カワイイ)。
サーボ位置調整
まずはブラウザアプリの”Calibration”を選択して、サーボ位置の調整を実施します。
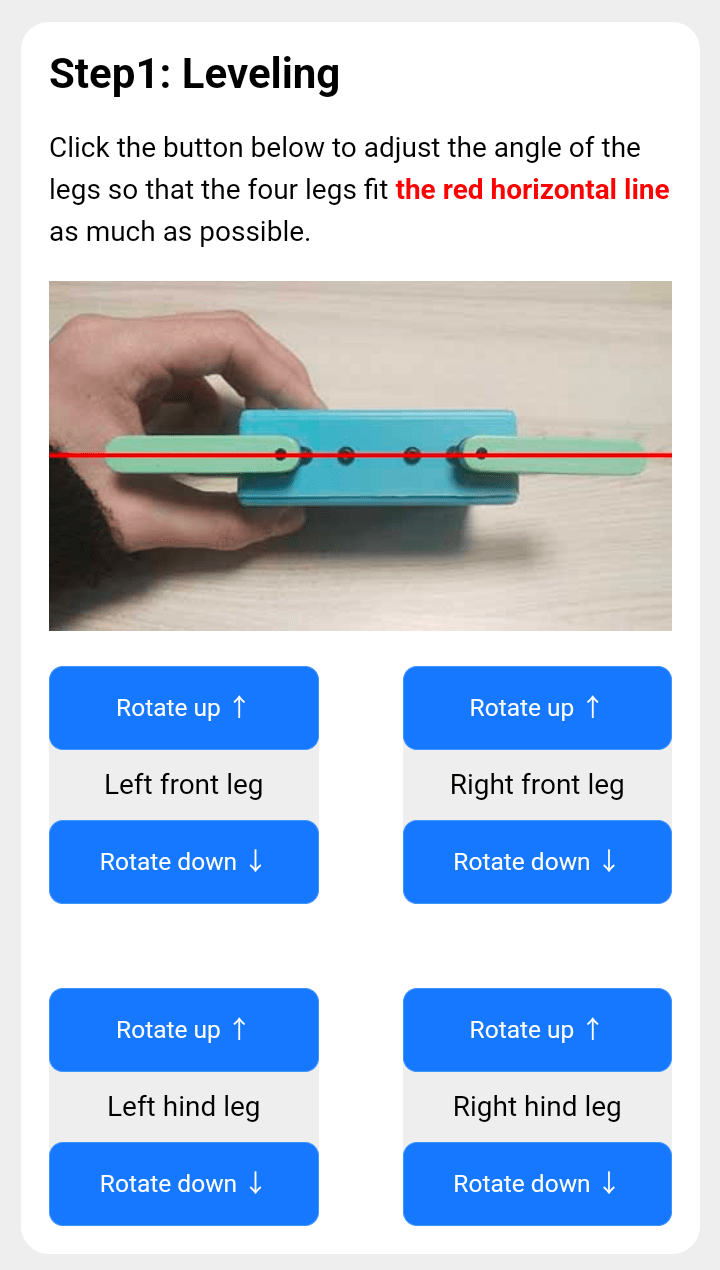
各足が水平になるように Up/Down ボタンで調整後に保存します。
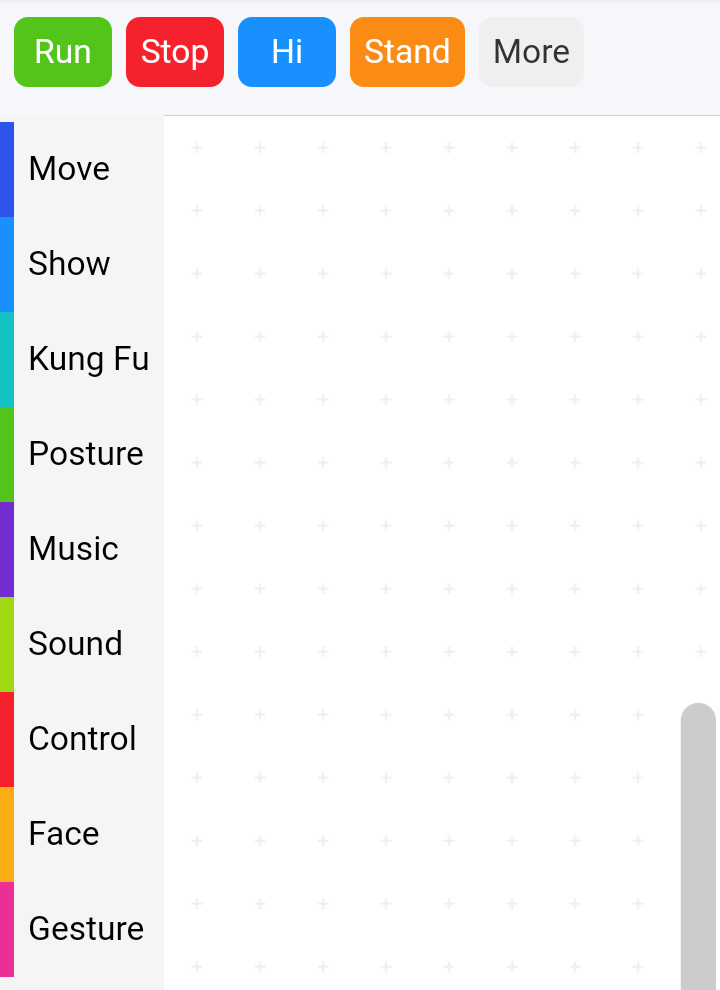
ジョイスティックでリモコン
“Joystick”を選択して いよいよスマホでリモートコントロール
メチャクチャ縦横無尽に動くww
たった4つのサーボでこんなに動けるかね しかし。
しっかりIMUセンサで上下の姿勢を検知しているようです。
— HomeMadeGarbage (@H0meMadeGarbage) August 1, 2023
歩容
なんでこんなに動けるんだろう?
以前に自分でも製作してみて理解できたつもりだったけど。。
逆に全然分からなくなりましたww
前進 (後進)
前進は以下のような足運び。
うーん良く分からない。なんでコレで前進したり後進したりできるんだろう?
前進 歩容
どう思われます?
なんか3拍子で歩いているのですが pic.twitter.com/Lognvn7GNb— HomeMadeGarbage (@H0meMadeGarbage) July 31, 2023
旋回
これについてはさらに全く分からない。ゼロ!
旋回の歩容
もう はっきり言って何してるのかサッパリわからない pic.twitter.com/L5MhSKrjdp— HomeMadeGarbage (@H0meMadeGarbage) July 31, 2023
おわりに
ここではいただいた4つのサーボによる小型ロボット犬の動作を楽しみました。
動画で見た以上に実物の動きは凄くて不思議ですらあります。
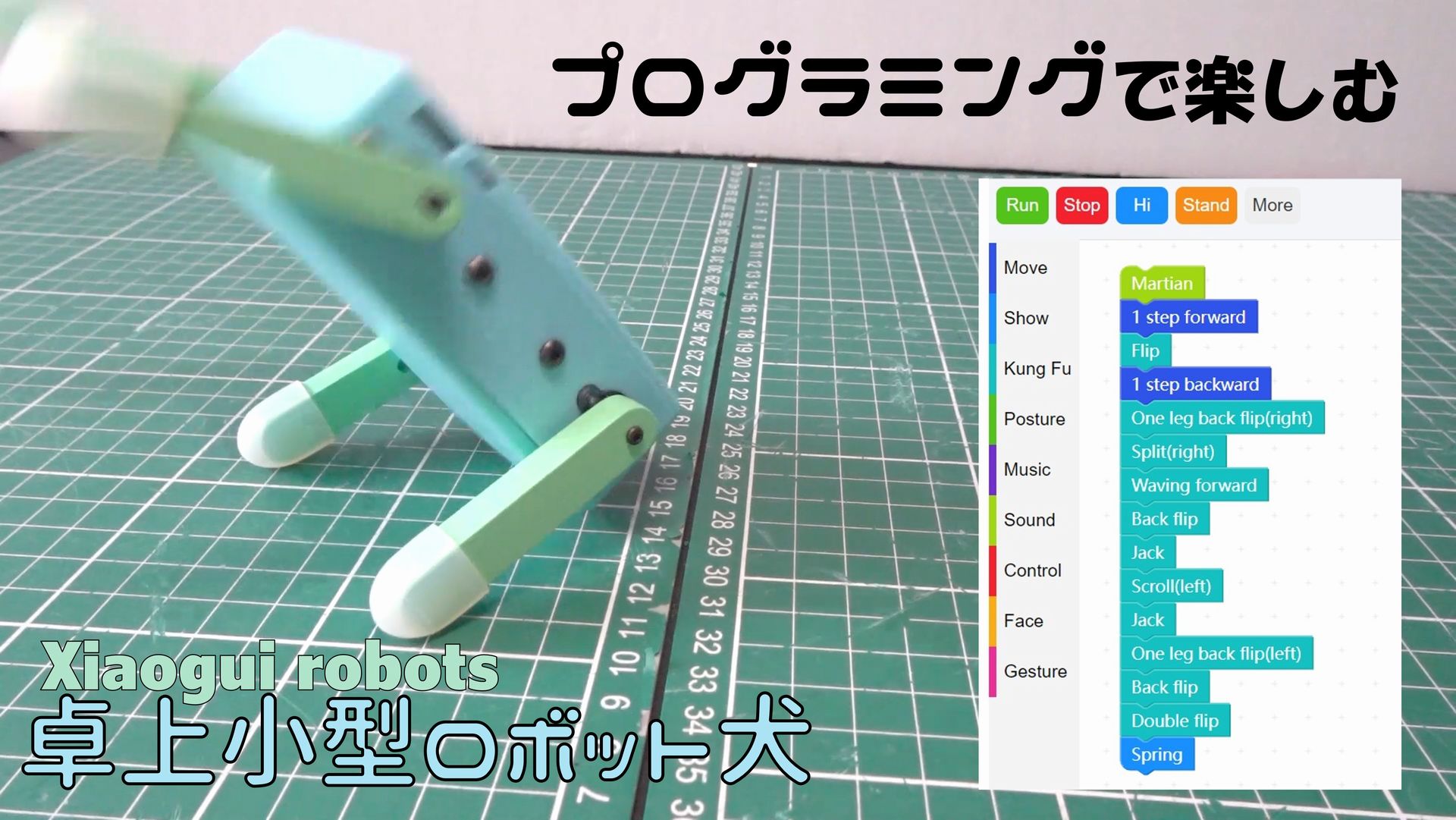
制御用のアプリではブロックやPythonでプログラミングも可能のようなので、じっくり勉強し直して歩容をマスターしたいです。マジで知りたい!
あとリモコン動作もうまくなりたい。
— HomeMadeGarbage (@H0meMadeGarbage) July 31, 2023
☟本家は超縦横無尽
My name is Xiaogui, a robot dog who knows Chinese Kung Fu. pic.twitter.com/UY8S3xVarf
— Robot XiaoGui (@wgy421) January 29, 2023
なまけずに勉強しないと。
ドンドンわからないことが増え続けるわ
平日の昼間からゴロゴロ~ゴロゴロ~ pic.twitter.com/67mnSyrqVD
— HomeMadeGarbage (@H0meMadeGarbage) August 1, 2023