
月: 2022年1月
SHISEIGYO-1 Walkerを実現させたい俺5 ー歩行検討3ー
前回はリアクションホイールを用いたオートバランスによる前進歩行を確認することができました。 https://homemadegarbage.com/onewalker04 その他モーションも作りましたので報告いたします。 後進 後ろ歩きもできるようになりました。...
電子工作 2022.1.30 お父ちゃん ![]()
SHISEIGYO-1 Walkerを実現させたい俺4 ー歩行検討2ー
前回は足の座標からバランスする姿勢角を算出しての制御を確認いたしました。 https://homemadegarbage.com/onewalker03// ここでは歩行動作の最終調整を実施いたしました。 機体調整 これまでいじってきて改善点が見えてきましたので...
電子工作 2022.1.28 お父ちゃん ![]()
SHISEIGYO-1 Walkerを実現させたい俺3 ーバランス動作検討ー
前回はSHISEIGYO-1 Walkerの足構造と逆運動学を再検討し、ヨチヨチではありますが歩行動作を確認いたしました。 https://homemadegarbage.com/onewalker02// ここではバランス動作について検討します。 バランス動作検...
電子工作 2022.1.25 お父ちゃん ![]()

SHISEIGYO-1 Walkerを実現させたい俺2 ー歩行検討1ー
前回はシリアルサーボ (KRS3301) による足とリアクションホイールによるオートバランスシステムで 二足歩行ロボットSHISEIGYO-1 Walker を製作し、片足立ちを実現いたしました。 https://homemadegarbage.com/onewalker01/ [amazon...
電子工作 2022.1.24 お父ちゃん ![]()

SHISEIGYO-1 Walkerを実現させたい俺1 ーキックオフー
先日 2軸の姿勢制御モジュール SHISEIGYO-2を用いて二足歩行ロボット(SHISEIGYO-2 Walker)を製作いたしました。 https://homemadegarbage.com/walker03// ここでは新たな2足歩行ロボットの実現を目指して検討を進めます。 ...
電子工作 2022.1.22 お父ちゃん ![]()
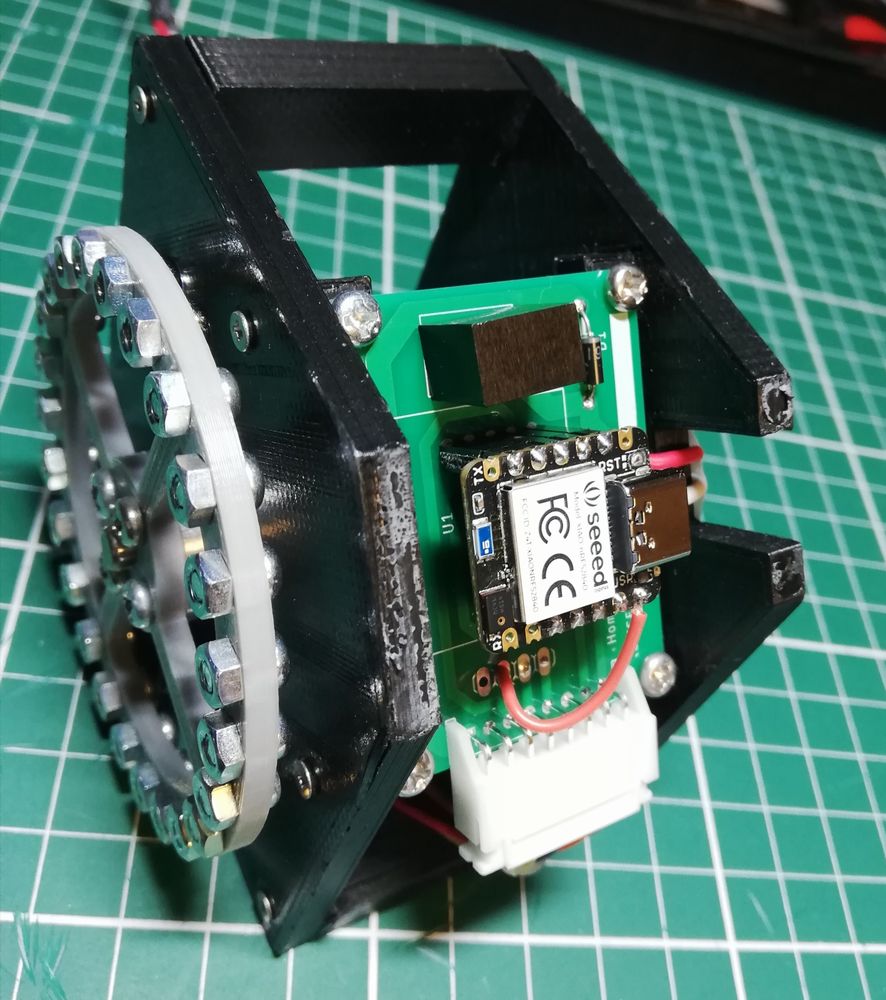
Seeed XIAO BLE nRF52840 Sense で1軸 姿勢制御モジュール 製作
先日はSeeed XIAO BLE nRF52840 Sense の味見をいたしました。 https://homemadegarbage.com/xiao-sense01 [bc url="https://www.seeedstudio.com/Seeed-XIAO-BLE-Sense-nRF5...
電子工作 2022.1.20 お父ちゃん ![]()

SHISEIGYO-2 Walker の歩行を再検討3
前回はSHISEIGYO-2 Walkerで逆運動学による歩行を確認しました。 https://homemadegarbage.com/walker02/ 上下前後を正弦波形で回転するように移動させる歩行から、もう少し人間らしい歩行を目指してみました。 足の前後 ...
電子工作 2022.1.19 お父ちゃん ![]()
Seeed XIAO BLE nRF52840 Sense を使ってみた
Seeed XIAO BLE nRF52840 Sense を購入し味見してみましたので報告いたします。 [bc url="https://www.seeedstudio.com/Seeed-XIAO-BLE-Sense-nRF52840-p-5253.html"] ...
電子工作 2022.1.18 お父ちゃん ![]()

SHISEIGYO-2 Walker の歩行を再検討2
前回は2足歩行ロボット SHISEIGYO-2 Walker の足を逆運動学で位置指定して動かせるようにしました。 https://homemadegarbage.com/walker01 ここでは逆運動学での歩行について検証しました。 歩行検証 逆運動学による...
電子工作 2022.1.17 お父ちゃん ![]()
SHISEIGYO-2 Walker の歩行を再検討1
以前製作したリアクションホイールを用いた2足歩行ロボットSHISEIGYO-2 Walker の歩行について再度検討したいと思います。 https://homemadegarbage.com/2leg-robot SHISEIGYO-2 Walker バ...
電子工作 2022.1.14 お父ちゃん ![]()

歩行検討2 -シリアルサーボと距離を詰めたい俺7-
前回からシリアルサーボ (KRS3301)を用いて製作した足ロボットの歩行の検討を始めました。 https://homemadegarbage.com/krs06/ [amazonjs asin="B077YK4HM4" locale="JP" title="ロボット用サーボモーター KRS-3...
電子工作 2022.1.13 お父ちゃん ![]()
歩行検討1 -シリアルサーボと距離を詰めたい俺6-
前回は製作した足を逆運動学で制御して各足を任意の座標に動かせるようにしました。 https://homemadegarbage.com/krs05// ここからはいよいよ歩行の検討にはいります。 足踏み運動 歩行の前にまずは以前に順運動学でやった足踏みを逆運動学...
電子工作 2022.1.11 お父ちゃん ![]()

M5Stack で HelloWorld(Mac OS Big Sur)
お父ちゃんに貰ったM5Stackで、まずは定番のHelloWorldをやってみました。 [amazonjs asin="B07CLZYQPY" locale="JP" title="M5Stack拡張可能なマイクロ制御モジュールWiFi Bluetooth ESP32開発キットArduino LC...
電子工作 2022.1.10 お母ちゃん ![]()
足を逆運動学で制御 -シリアルサーボと距離を詰めたい俺5-
前回はシリアルサーボ (KRS3301)を用いて製作した足で足踏み動作を実現しました。。 https://homemadegarbage.com/krs04// [amazonjs asin="B077YK4HM4" locale="JP" title="ロボット用サーボモーター KRS-330...
電子工作 2022.1.10 お父ちゃん ![]()

シリアルサーボで足踏み -シリアルサーボと距離を詰めたい俺4-
前回はシリアルサーボ (KRS3301)を用いて足を製作しました。 https://homemadegarbage.com/krs03/ [amazonjs asin="B077YK4HM4" locale="JP" title="ロボット用サーボモーター KRS-3301 IC...
電子工作 2022.1.8 お父ちゃん ![]()