ロボット犬『Mini Pupperミニぷぱ』がやってきた
本記事にはアフィリエイト広告が含まれます。
なんと ロボット犬『Mini Pupperミニぷぱ』の組み立てキットを提供いただけました!
なんと!
#MiniPupper のサンプルを
頂いちゃいました!こりゃ色々出来そうで興奮する
#ミニぷぱ pic.twitter.com/4FCJAODaXP
— HomeMadeGarbage (@H0meMadeGarbage) February 5, 2022
ミニぷぱ は2022年2月現在 Makuakeにて予約販売中です。

目次
Mini Pupperミニぷぱ
ミニぷぱ はラズパイ4搭載の四足歩行ロボットです。
12個のサーボモータで歩行します。

提供いただいたモデルの対応OSはUbuntu21.10でした。
キットにはコントローラとラズパイ4が同梱されており非常に嬉しかったです。
今はラズパイが全然入手できないですからね。
初めてのラズパイ4を思いがけず手にすることができました♪
無線コントローラもこのキットで勉強すれば今後色々応用できそうです。
無線コントローラと
もうこの世にないと思っていたラズパイ4これだけで今後の私の人生に良さを与えてくれている。
#MiniPupper #ミニぷぱ pic.twitter.com/RgFePSeiJr— HomeMadeGarbage (@H0meMadeGarbage) February 5, 2022
参考資料
組立てやソフト設定などは以下を参考に実施しました。

組立て
以下を参考に組み立てを実施しました。

マニュアル通り、バッテリ充電を開始しラズパイ用OS(Ubuntu21.10)をSDに焼きました。
32GBのSDカードが同梱されていました。イメージ焼きは2時間以上かかるので先にやっておいたほうがいいと思います。
キット自体は3Dプリント品や成形品やカーボンファイバー品など色々な素材で構成されておりメチャクチャ面白いです。
今後の自身のものづくりにも非常に役に立つと思います。
使用されている12個のサーボはカスタム品でした。
メタルギアが使用されているようで通常のマイクロサーボよりずっしり重いです。
マイクロサーボは型番不明
メタルギアで少し思い
#MiniPupper #ミニぷぱ pic.twitter.com/OvFbxVrIBN— HomeMadeGarbage (@H0meMadeGarbage) February 5, 2022
足組立て
足がよくできていて組み立ててみて勉強になりました。

こんな風に付け根にサーボ2個組めば、くの字に足を動かせるんですね。
支えの金属棒のボールジョイントもいいなぁ。
この足の構造はいつか自作の二足歩行ロボット SHISEIGYO-2 Walkerに応用したいと思います。
SHISEIGYO-2 Walker 歩行検討 pic.twitter.com/4LpzyFplJG
— HomeMadeGarbage (@H0meMadeGarbage) January 18, 2022
注意点
配線長が9cmのサーボが4個、15cmのサーボが9個 (予備1個) 同梱されており、
足を以下のように作成しました。

このようにしないと配線が短くて基板に接続できない場合があります。
ボディ組立て
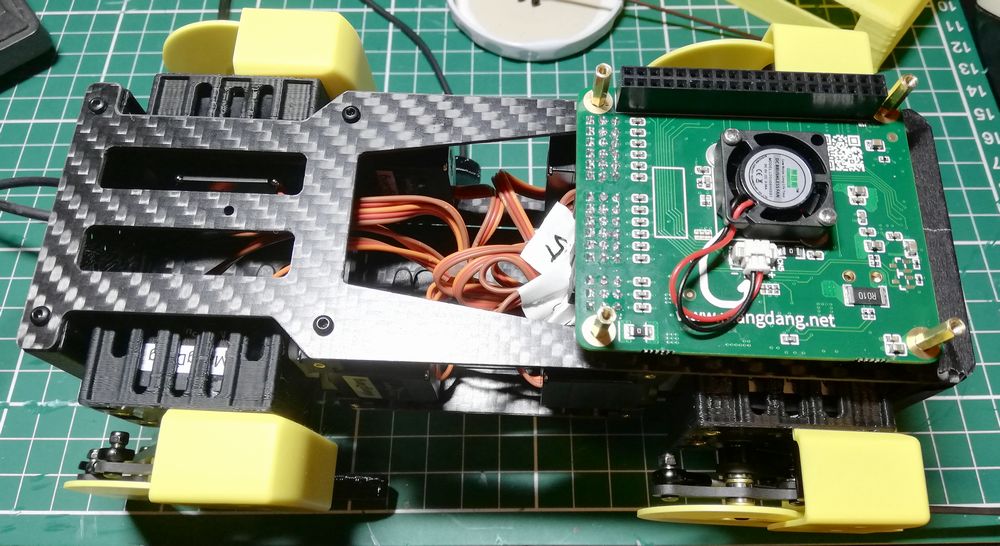
ボディフレームと足を組んで、サーボ配線を専用基板に接続します。
かなりギッチギチです。
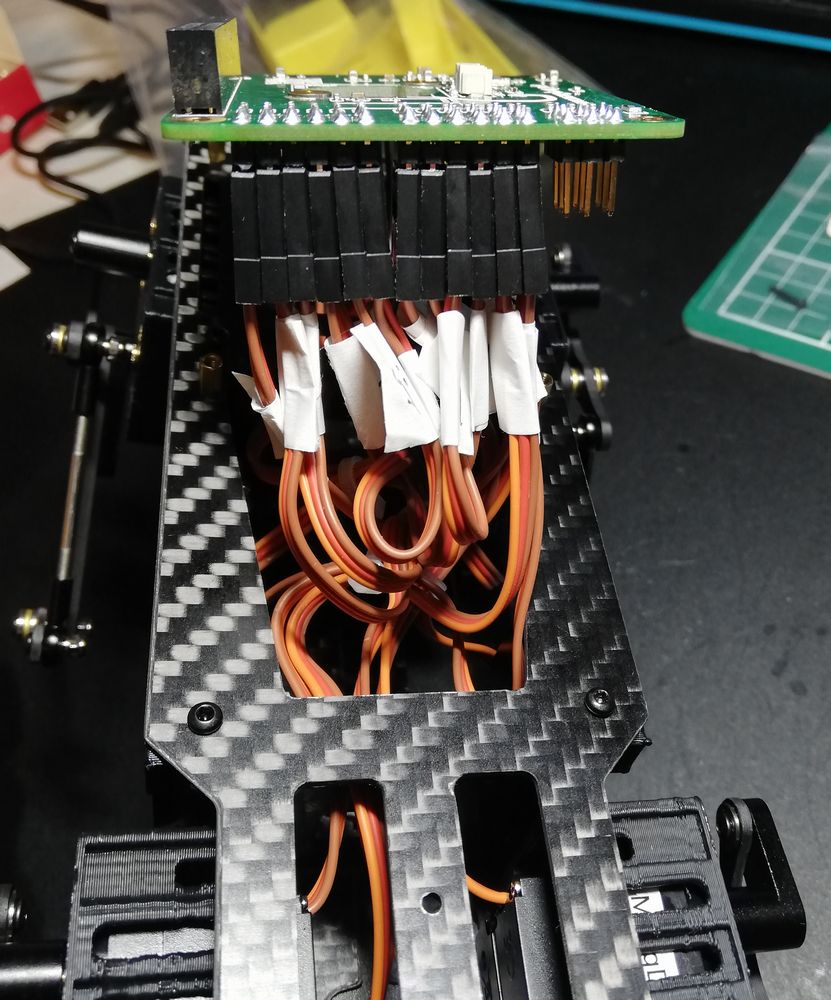
ラズパイ用のファンも専用基板に接続しました。
ネジがない
外装を取り付ける際にM1.4という小さいネジが必要だったのですが、同梱されていませんでした。。
あれ?M1.4ネジなんてないぞ?
#MiniPupper #ミニぷぱ pic.twitter.com/tF76xW5SsA— HomeMadeGarbage (@H0meMadeGarbage) February 5, 2022
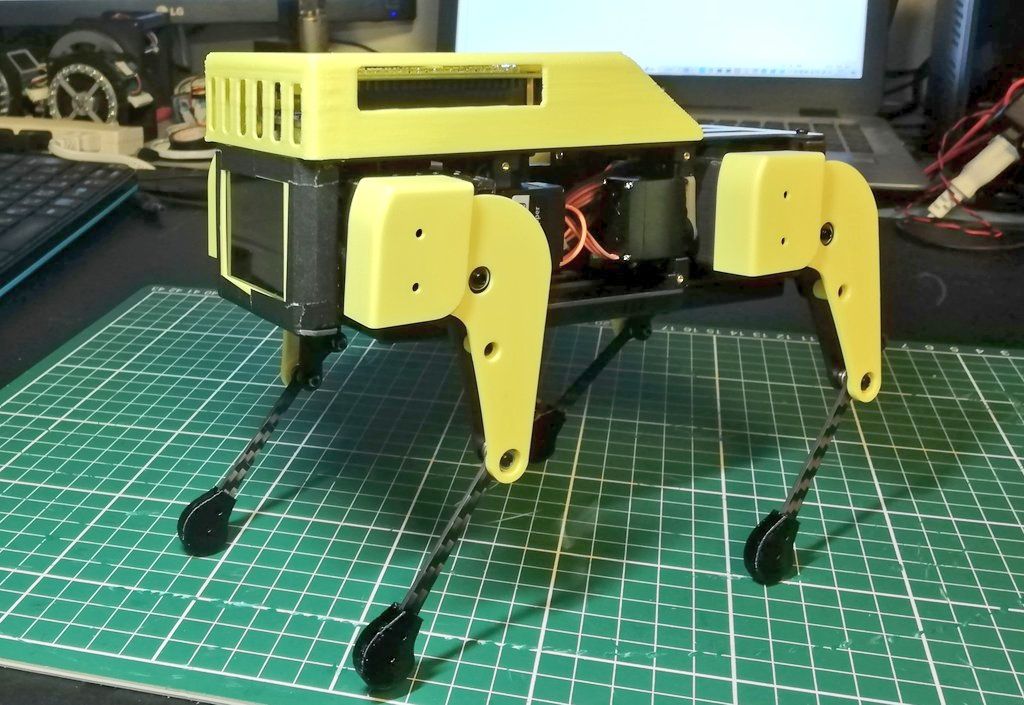
とりあえずテープ固定や一部外装なしでしのぎます。
完成
ソフトウェア
バッテリの電源を入れてラズパイを起動します。
以下を参考に初期設定を実施しました。

初期設定のためにラズパイにマウスとキーボードとディスプレイを接続します。
ここで問題が発生しまして。。ラズパイ4のHDMI端子はmicro HDMIだったのですが 我が家にはmicro HDMI変換コネクタがなかったのです。。
ちょっと焦りましたが、困ったときの近所のダイソー。駆け込んだところ販売していました。110円!
ダイソーに売ってないものはないと言われています。
ダイソー まじ最強 https://t.co/gYavxjk6iW pic.twitter.com/Hen9IvZYkS
— HomeMadeGarbage (@H0meMadeGarbage) February 5, 2022
無事ディスプレイを接続でき、Ubuntuの起動、WiFI設定が実行できました。
校正
組立て時にサーボの初期の位置調整などは一切せずに組み立てておりますのでオフセットの校正作業が必要になります。
どうもミニぷぱのカスタムサーボは可動範囲が360°な気がします。
手でいつまでもぐるぐる回せました。
デスクトップに校正用のソフト(Calibration Tool)があり起動します。

Ubuntu21.10では伏せの姿勢になるように各スライダを調整して”Update”をクリックして校正します。
最新キットの校正姿勢は伏せだったみたい
#MiniPupper #ミニぷぱ pic.twitter.com/gr81eunc4l— HomeMadeGarbage (@H0meMadeGarbage) February 5, 2022
動作
コントローラとペアリングしてミニぷぱを動かします。
以下を参考に実施しました。

メチャクチャ機敏に動いています!
方向転換もヌルっと実施してくれて驚きました。
おわりに
ここでは ミニぷぱ の組み立てからコントローラによる動作確認を実施しました。
筐体の素材の使い分けや足の構造など非常に勉強になりました。
本当に良いものをいただき感謝の限りです。大切にします。
無事に動いて安心しましたが、制御内容はまだまだ謎です。
4足歩行ってどうやるんですかね?どのように前後左右に移動しているのか良く分かりません。
専用基板の回路構成もまだ理解出来ていないですしラズパイへの接続も把握していません。
どうやってコントローラとペアリングしているのでしょうか?
調べて勉強するべきことがまだまだたくさんあります。
楽しんで実施していきたいと思います。
ひとまず直近では以下をやりたいです。
- ミニぷぱ IP固定
- VNC接続
SSH接続だけだと不便なのでVNCはやっておきたいですね。
まずはUbuntuの勉強かな。
引き続き頑張ります!