QDDモータでHVを考える
本記事にはアフィリエイト広告が含まれます。
QDDモータ Robstride 05を購入してもろもろ検討・製作をしてきました。
QDDモータを活用するうえで どうしても考えないといけないのが、電源電圧が高いということ。
ここではHV (ハイボル)について考えましたので報告します。

目次
High Voltage
私はエレガントな電子回路設計者ですので12V以上の電圧となると高電圧 (HV) で野蛮であると感じてしまいます。
QDDは低いギア比でも高いトルクを維持するためにコイルに大きな電流を流す必要があり、電源電圧も高くなる傾向があります。
今後QDDでいろいろやっていくためにはHVから逃げるわけにいきません。
これを機にHVと向き合い自身にマッチしたHV電源構成を考えることのできる人間になりたいと思います。

QDD電源構成を学ぶ
まずはオープンになっているQDDロボットのHV系電源構成を学びます。
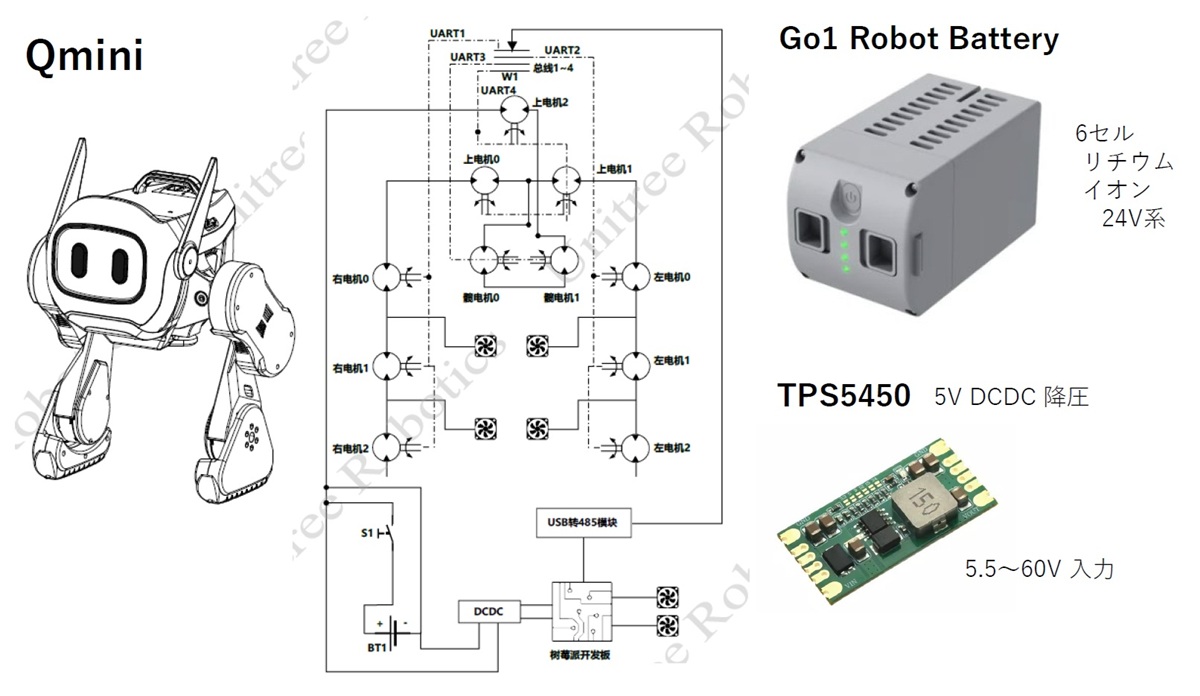
Qmini
Qminiは山東大学とUnitree Roboticsの協働開発によるオープンソース2足歩行ロボットです。
電源周りは以下の通り
参考: https://github.com/unitreerobotics/Qmini
Unitree のロボット犬にも使用されている 6セルのリチウムバッテリ Go1 Robot Battery (24V系) が採用され、
ロジック電源はTPS5450で5Vに 降圧し供給
TPS5450:広入力範囲 (5.5~60V)、5A出力
MEVITA
MEVITAは東京大学によるオープンソース2足歩行ロボットです。
電源周りは以下の通り
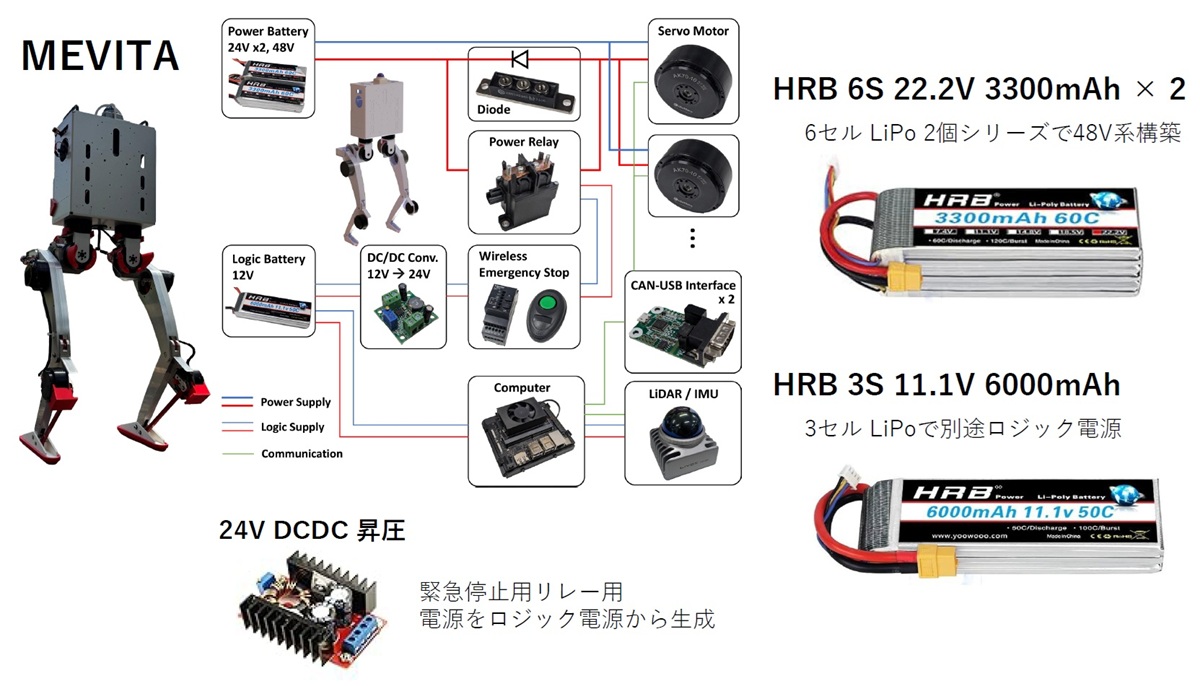
参考: https://haraduka.github.io/mevita-hardware/
6セル2個シリーズと3セルのLiPoバッテリを使用してモータ電源 (48V系)とロジック電源 (12V系)を分けて構成されています。

考察
以上をみるにQDDモータ電源に高電圧のバッテリを使用することは避けて通れないようです。
ロジック電源はDCDCで降圧か別途バッテリを設けるなどいろいろバリエーションが考えられそうです。
HM-01
ちなみにHomeMadeGarbageの2足歩行ロボット HM-01の電源構成は以下の通りです。
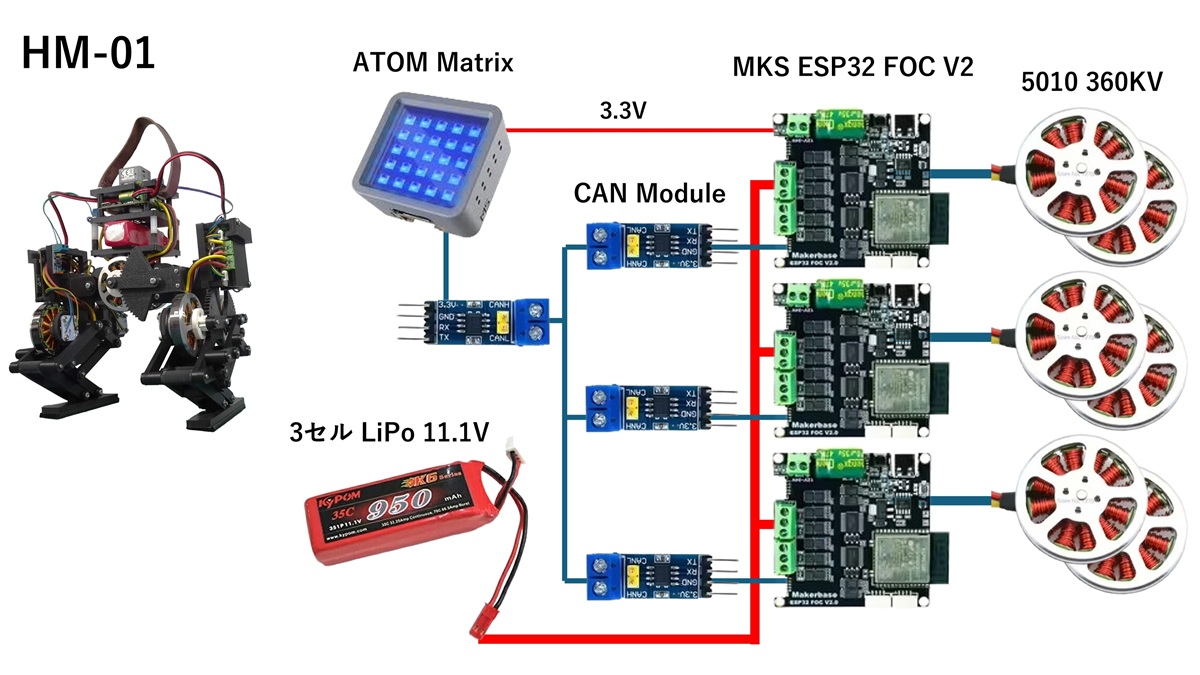
3セルLiPoバッテリを使用して12V以上の高電圧を使用しないやさしい構成となっております。
ロジック電源はモータドライバが生成する3.3Vを使用していて大変に経済的です。

QDDバク転ロボット
前回製作したQDDバク転ロボットの電源を外部供給ではなくバッテリ搭載でコードレス化したいと思います。
あーやっぱ QDDだわ pic.twitter.com/HaIIFnCm2G
— HomeMadeGarbage (@H0meMadeGarbage) September 12, 2025
(バク転というかバク宙だね。すげーや QDDのパワーは!)
デコデコ
6セル バッテリ等の高電圧電池は当然所有していないので、ここではDCDC昇圧で検討したいと思います。
手持ちの3セルLiPoバッテリを昇圧してQDDモータに供給、
ロジック系は降圧DCDCして5V供給を考えます。
想定する電源周りは以下の通り
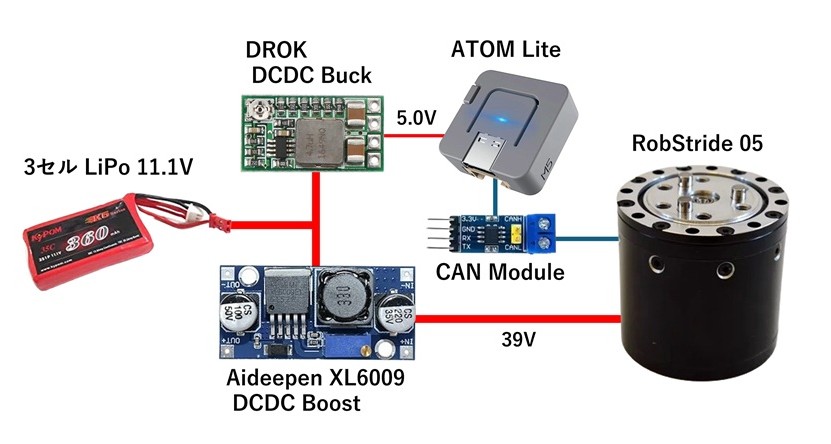
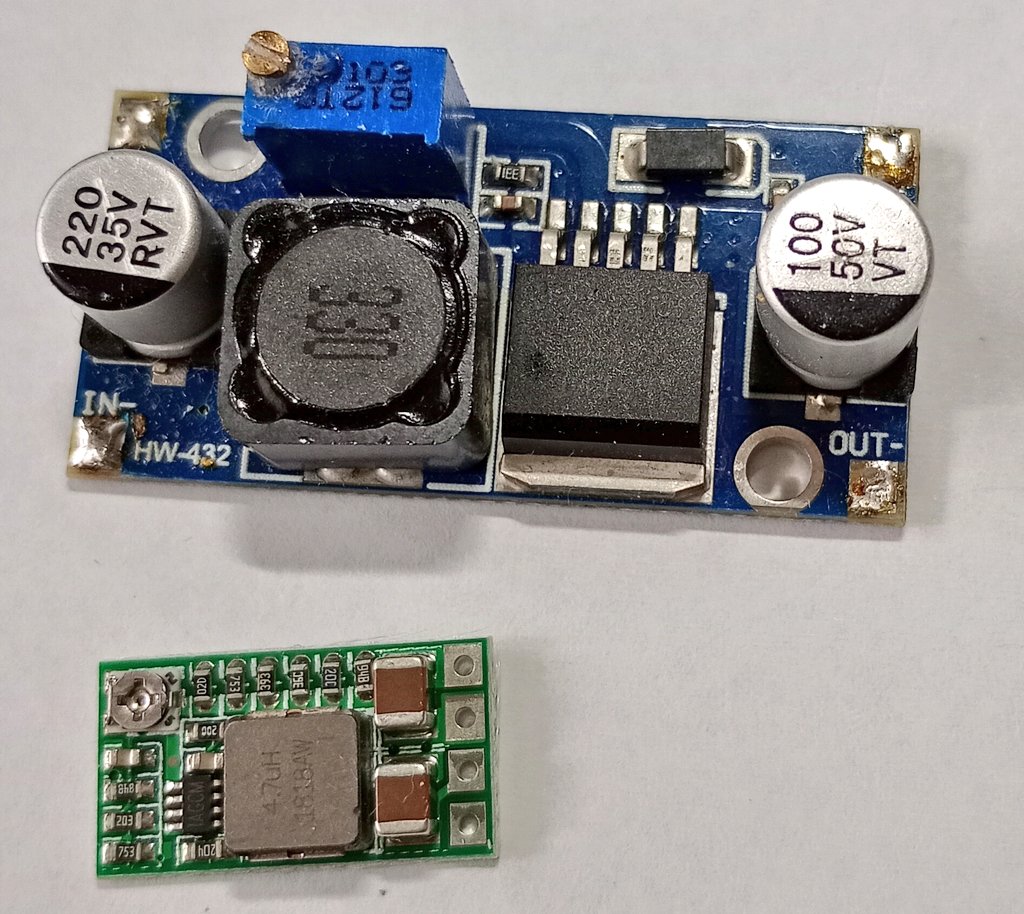
昇圧DCDC (Boost) 最大で39V出力でした
降圧DCDC (Buck) 5V出力設定としました。
製作
DCDCモジュールとバッテリを搭載
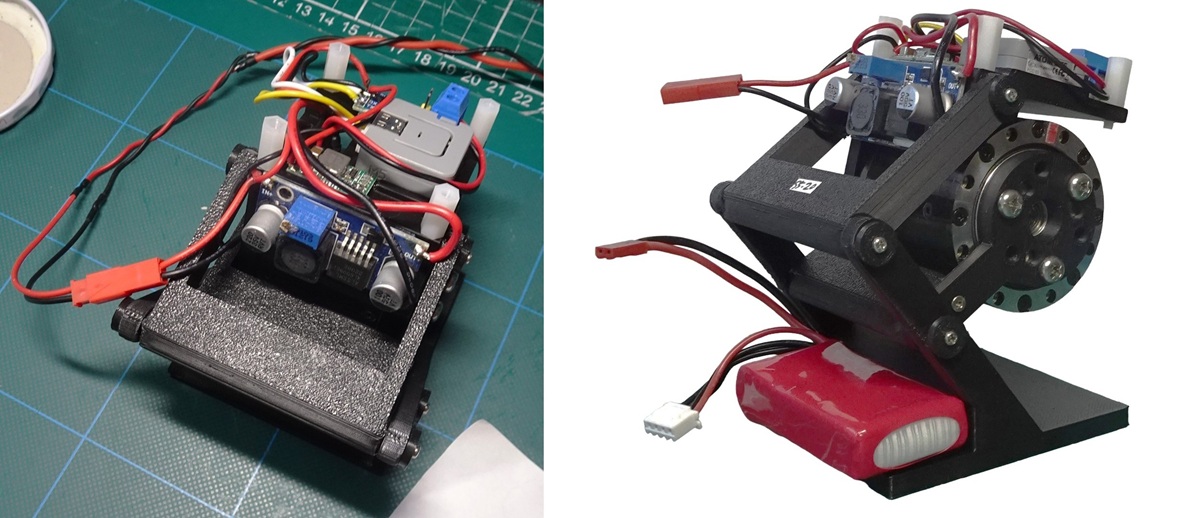
動作
バク転動作実施
バッテリ搭載 QDD バク転ロボ pic.twitter.com/yGp5z7p8hS
— HomeMadeGarbage (@H0meMadeGarbage) September 23, 2025
バッテリ等で重量が増したのでバク宙とはいきませんが、バク転は見事に実現できました。
あくまで まだQDDモータ1個の場合となりますが、昇圧DCDCでもQDDモータのパワーを堪能することができました。
おわりに
ここではQDDモータをとおしてHV電源について考えました。
48V電源に ついてはどこかで真面目に考えないといけないと思います。
とりあえずはDCDCで昇圧かなと思っていますが、モータ数量が増えれば高電圧バッテリも検討しないといけないかもしれません。
高電圧・高出力のDCDC スイッチングモジュールも今後どんどん増える気もするので世の流れもみつつQDDを楽しみたいと思います。
じゃあまた
はいっ! はいっ! pic.twitter.com/d4N2G6avlD
— HomeMadeGarbage (@H0meMadeGarbage) September 26, 2025