ロボットアーム
ロボットアームでLチカしてみた
HomeMadeGarbage Advent Calendar 2022 |3日目 ...
Advent Calendar / ロボットアーム / 電子工作 2022.12.3 お父ちゃん ![]()
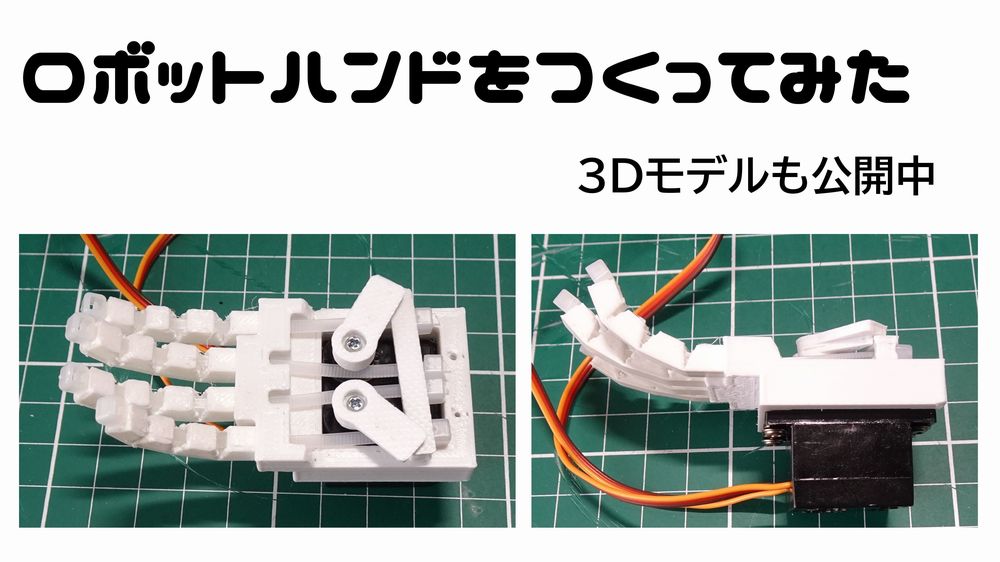
ロボットハンドをつくってみた
たまに面白い製品がないかとAliExpressサーフィンをするのですが 非常に興味深いモノを見つけました。 [bc url="https://ja.aliexpress.com/item/1005003464807960.html"] サーボモータで駆動する小型のロボットハンドです。 ...
シリアルサーボでロボットアーム -シリアルサーボと距離を詰めたい俺2-
憧れのシリアルサーボ (近藤科学 KRS-3301) を入手し、前回はじめて動作させました。 https://homemadegarbage.com/krs01 ここではシリアルサーボでロボットアームを製作しましたので報告いたします。 ロボットアーム 前回の連動...
マイクロサーボでロボットアームを楽しむ
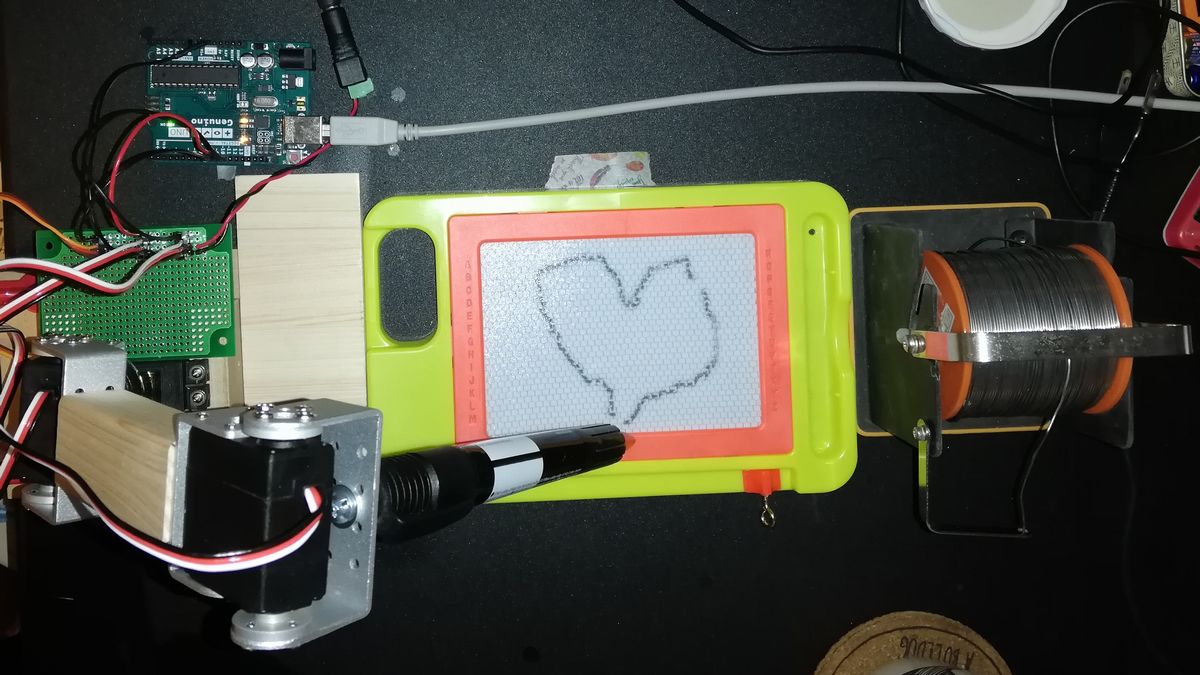
以前、製作したロボットアームを低価格で使いやすいマイクロサーボでも作ってみました。 https://homemadegarbage.com/arm05 動作 早速動作をご覧ください。前回同様にコントローラで制御しています。 ダイソーのお絵描き...
自作ロボットアーム動作の 記録・再生 機能
以前 自作ロボットアームを自作コントローラで制御するというものを紹介させていただきました。 https://homemadegarbage.com/arm05 実はこれには動きをレコードして再生する機能も追加しており、上の記事の最後にサラッと紹介したのですが、詳細知りたいとのありがたいコメントい...
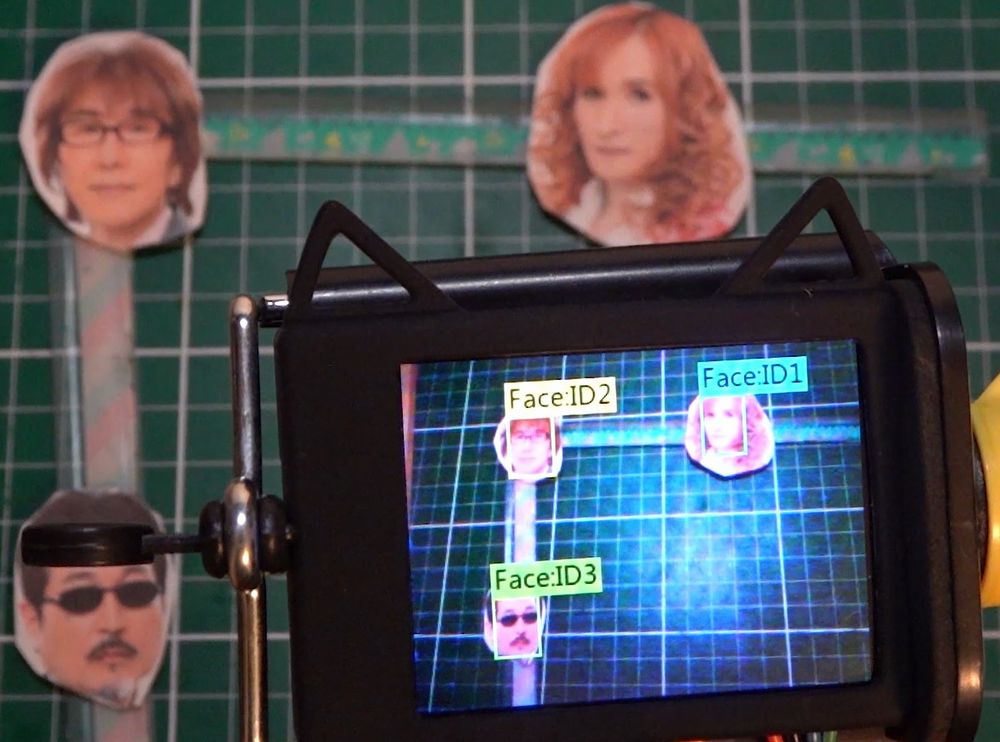
HuskyLens で ロボットアーム制御
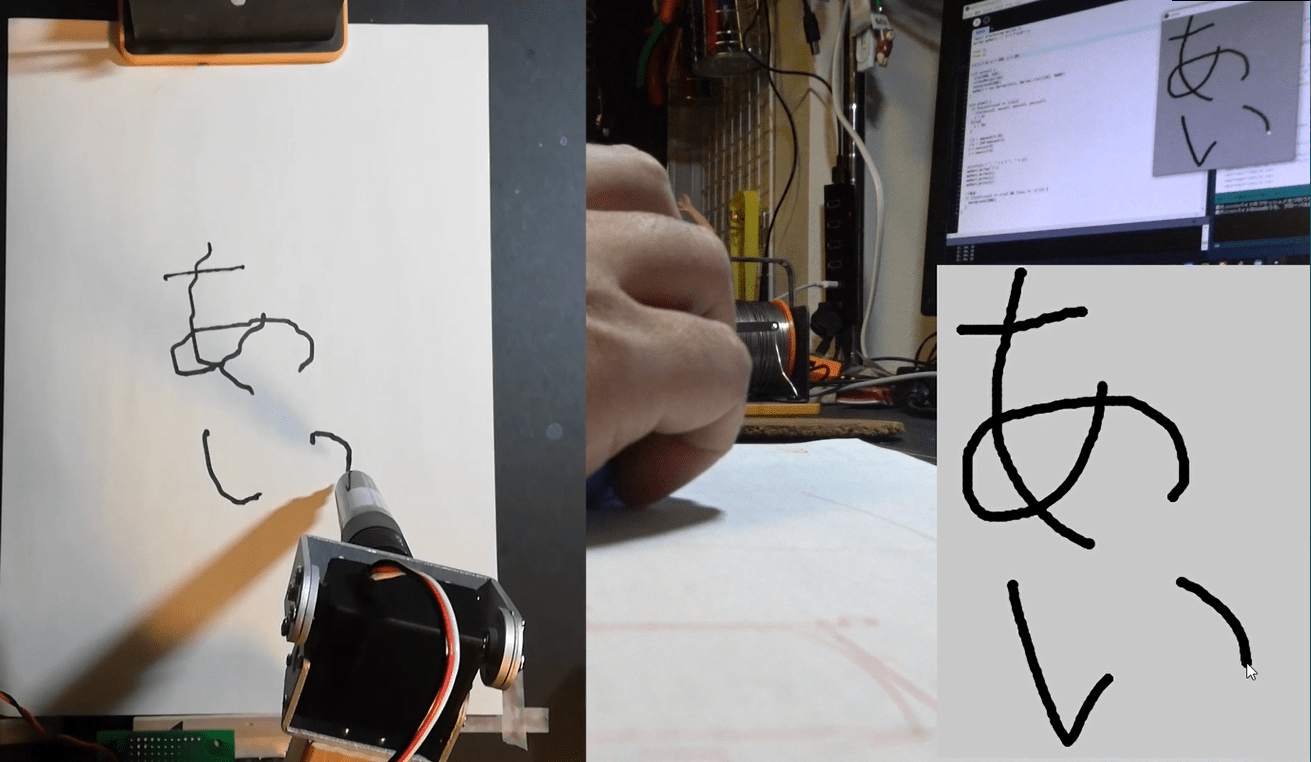
前回は HuskyLens の物体追従機能を用いてお絵描きを楽しみました。 https://homemadegarbage.com/huskylens03 今回は長らくの夢であった"画像認識でロボットアームを制御"を試してみました。 [amazonjs asin="B085NL4XCB" lo...
Clock Arm 時計を自作
以前作ったロボットアームで時計をこしらえました。 こんな時期ですから自宅でものつくるか時計眺めるしかないですもんね。 一挙両得 動作 早速動きを見てください。 Clock Arm これがあれば自宅待機でも退屈しません。#clockArm pic.twitter.com/...
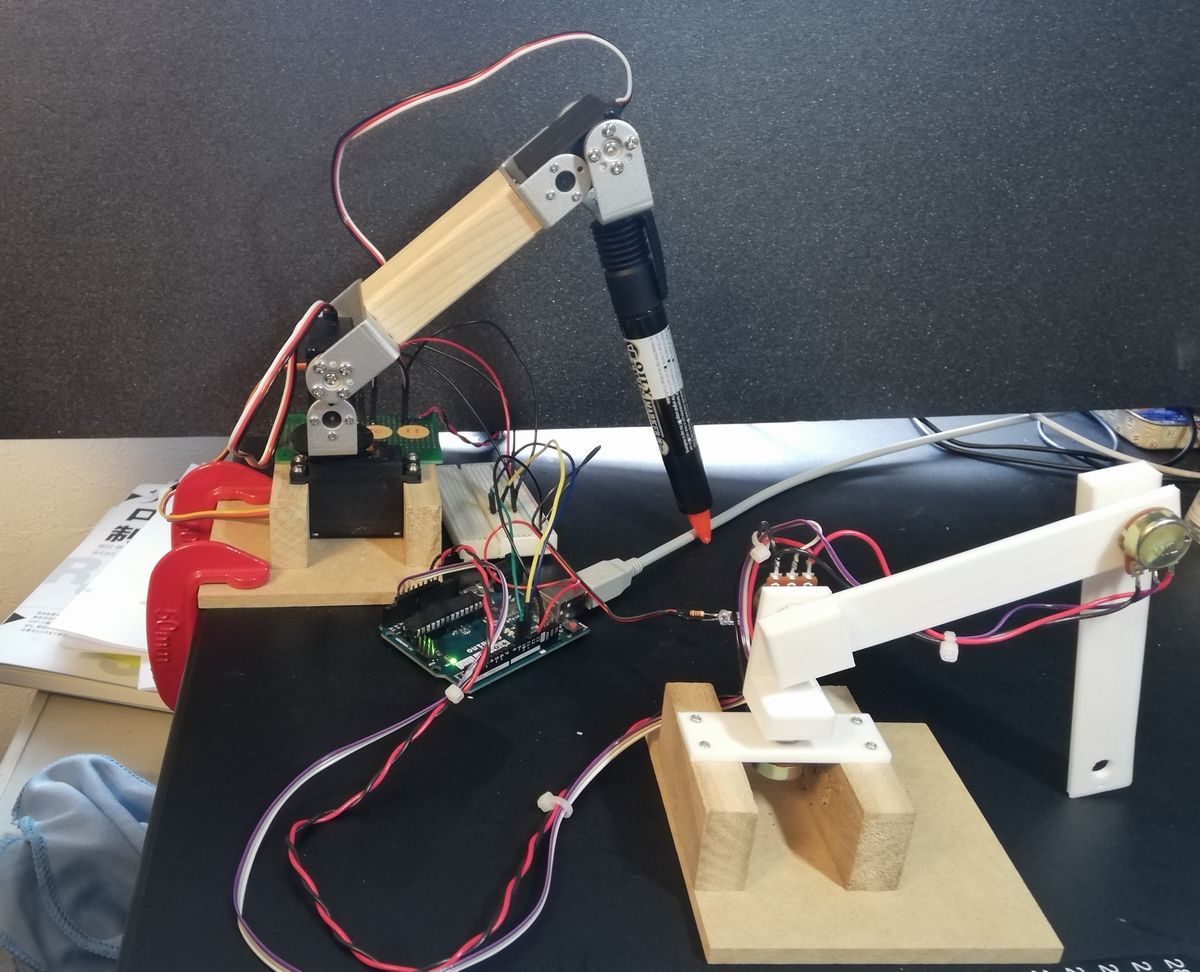
自作コントローラで制御 ーロボットアーム自作への道5ー
Arduino Advent Calendar 2019 | 19日目 さてここまでは主に逆運動学によってロボットアームを制御してきましたが、やっぱり物理コントローラでグリグリしたくなるのが摂理。 ロボットアームを2対用意して、一方を手で動かして他方が追従するみたいのがやりたかったのですが、 ...
Advent Calendar / ロボットアーム / 電子工作 2019.12.19 お父ちゃん ![]()
Arduino UNO でロボットアームを堪能 ーロボットアーム自作への道4ー
Arduino Advent Calendar 2019 | 17日目 これまで楽しんできたロボットアーム自作をアドベントカレンダーへの参加を機にここいらで一旦まとめてみたいと思います。 割と自由自在に動かせるようになりましたので紹介させてください。 構成 ...
Advent Calendar / ロボットアーム / 電子工作 2019.12.17 お父ちゃん ![]()
Processing で制御 ーロボットアーム自作への道3ー
さて前回は逆運動学によって、ロボットアームの座標からサーボの角度を算出して制御を楽しみました。 そうなるとコントローラでリアルタイムに動かしたくなるのがヒトというものです。 ここではProcessingを用いてマウスでのPC上のお絵描きを同時にロボットアームでもしてしまいます。 ...
Advent Calendar / ロボットアーム / 電子工作 2019.12.12 お父ちゃん ![]()
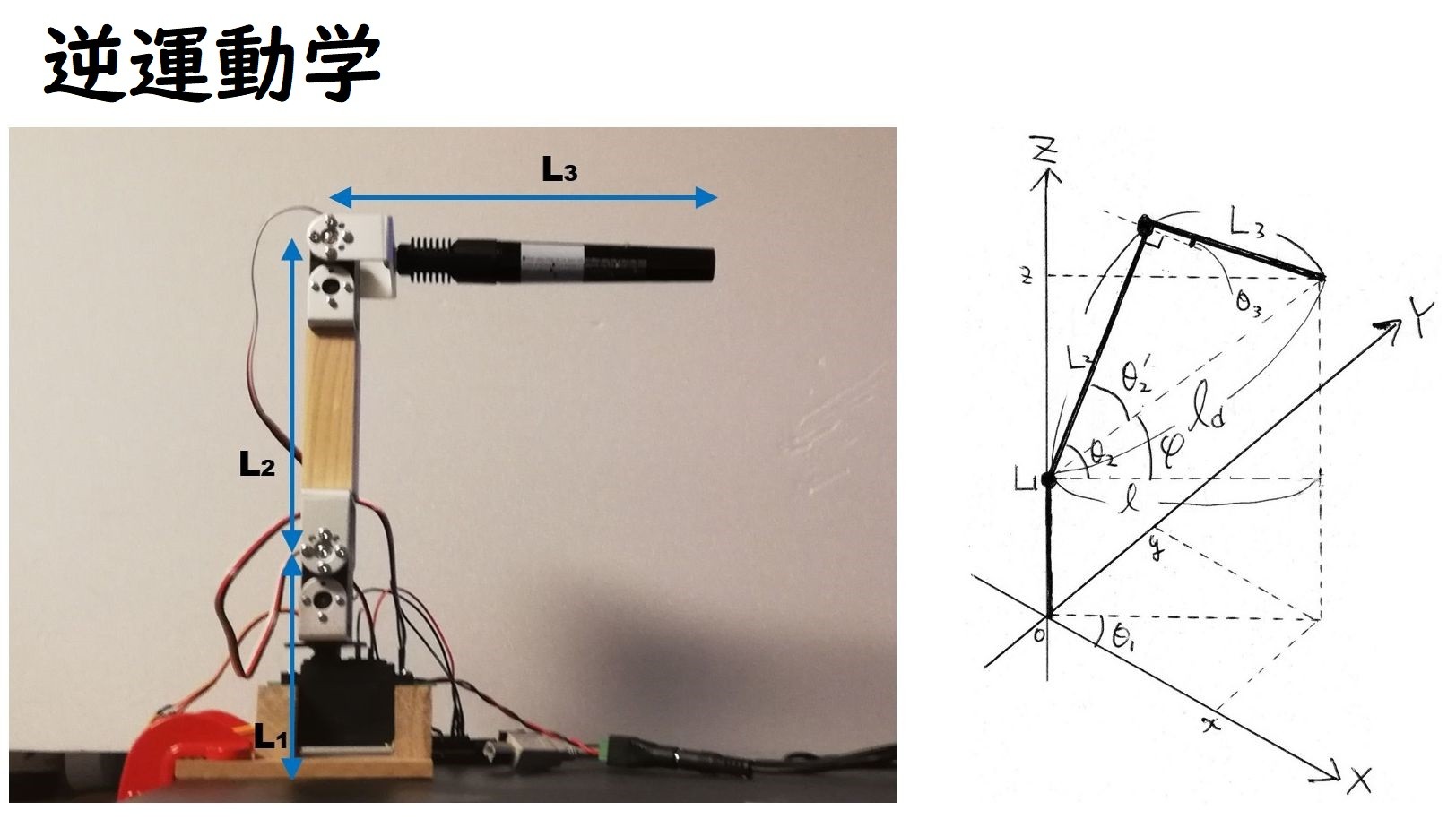
逆運動学 で制御 ーロボットアーム自作への道2ー
さて今回は前回作ったロボットアームを本格的に動かしていきたいと思います。 以下の書籍で逆運動学なるものを知りましたので、その逆運動学でロボットアームを制御します。 [amazonjs asin="427422211X" locale="JP" title="ROBO-ONEにチャレンジ! 二足歩...
Advent Calendar / ロボットアーム / 電子工作 2019.12.9 お父ちゃん ![]()
ロボットアームことはじめ ーロボットアーム自作への道1ー
やっぱりロボットが作りたい!ということで書籍を購入してみました。 [amazonjs asin="427422211X" locale="JP" title="ROBO-ONEにチャレンジ! 二足歩行ロボット自作ガイド"] 以前もトライしたことあるのだけど、スキルと資金が足りなくて足しかで...
Advent Calendar / ロボットアーム / 電子工作 2019.12.7 お父ちゃん ![]()