
IoT
M5Stack UnitCatM 位置情報送信システム実証実験
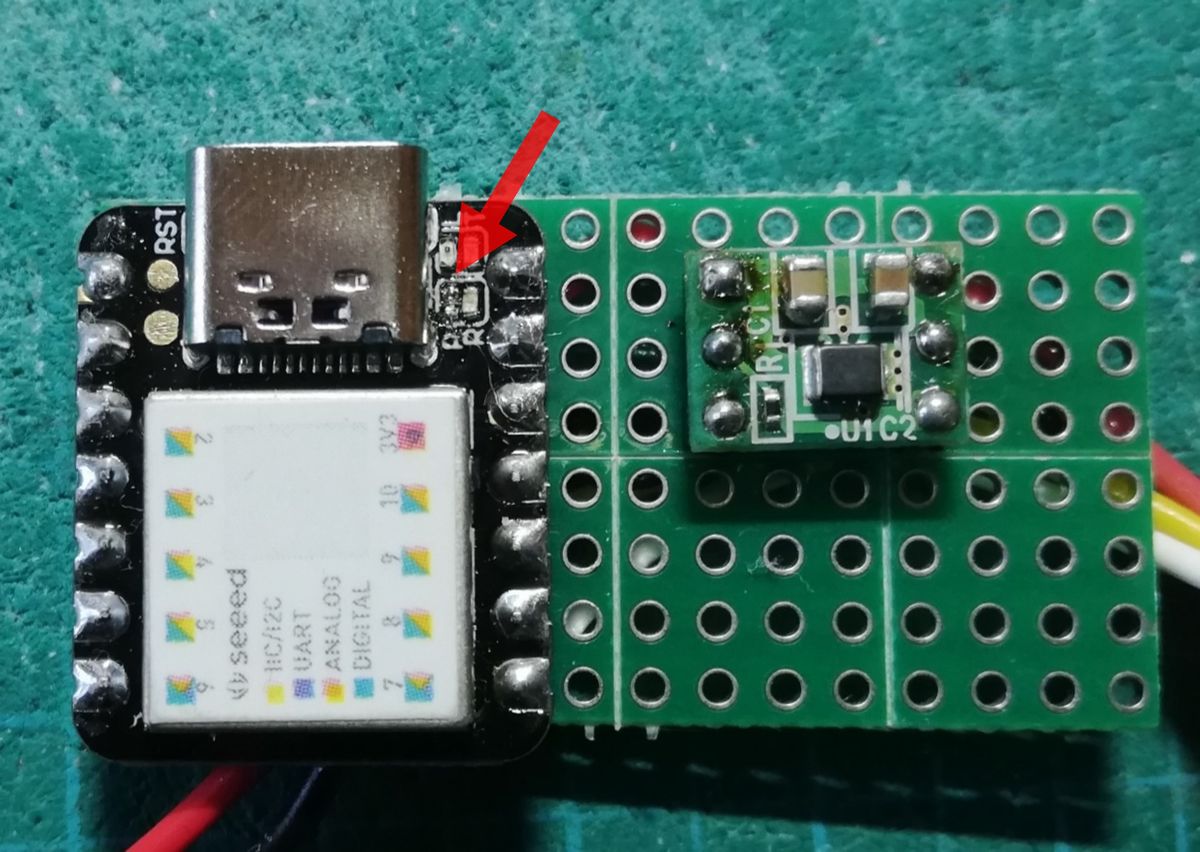
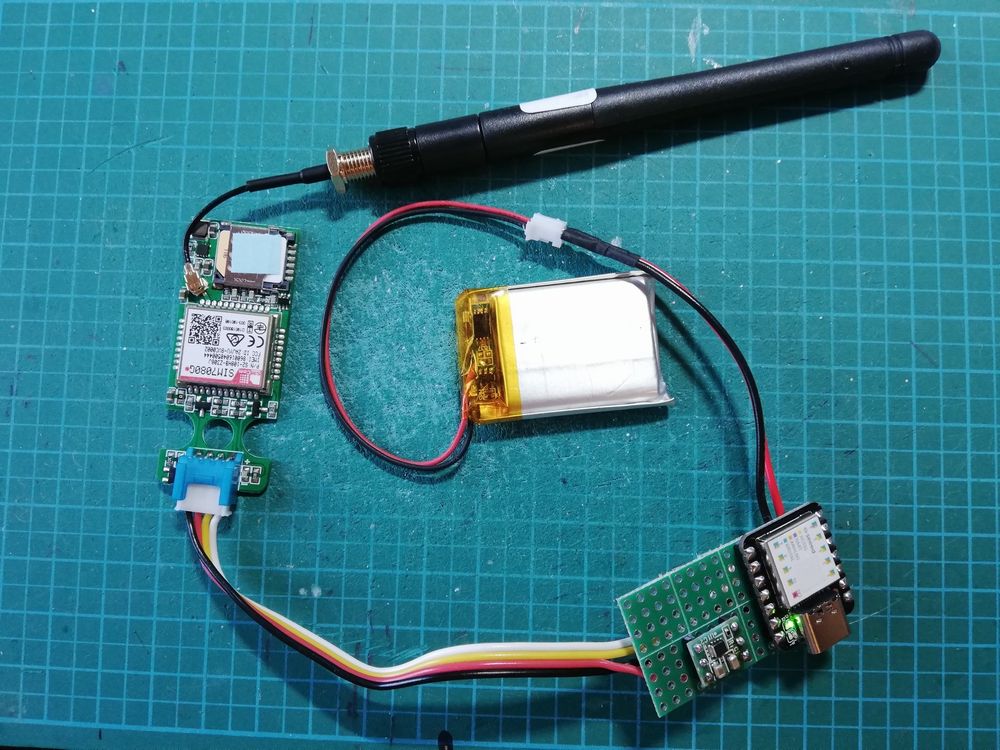
以前製作したM5Stack UnitCatMを用いた 位置情報送信システムの実証実験を実施しましたので報告いたします。 構成おさらい 製作した位置情報送信システムの構成をおさらいいたしましょう。 制御はマイコンXIAOで実施し、30分おきにスリープから起床し5...
IoT 2022.8.10 お父ちゃん ![]()

obniz で冷蔵庫 牛乳残量計 製作
HomeMadeGarbage Advent Calendar 2021 |11日目 obniz IoT コンテスト2021 に牛乳残量計を応募しました。 事前にアイディア投稿することで obniz Board 1Y を提供していただき大変お得なコンテストでありました。 https://hom...
Advent Calendar / IoT / 電子工作 2021.12.11 お父ちゃん ![]()

toio で掛け算学習 九九Qの駆
HomeMadeGarbage Advent Calendar 2021 |4日目 ロボットトイ toio を用いて掛け算学習ゲームを作成いたしました! toioの「Do!コン」というコンテストでアイディアを投稿してtoioを提供いただき 実際に製作して応募しました。 ...
Advent Calendar / IoT / 電子工作 2021.12.4 お父ちゃん ![]()
M5Stack UnitCatM 位置情報送信システムの省電力化
前回はUnitCatM で通信基地局位置情報を取得して長期運用を試してみました。 https://homemadegarbage.com/catm06/ 30分おきに位置情報をサーバに送る仕様で、400mAhのLiPoバッテリで121時間動作しました。 ここでは消費電力を低減して更に長期の動作...
IoT 2021.11.2 お父ちゃん ![]()
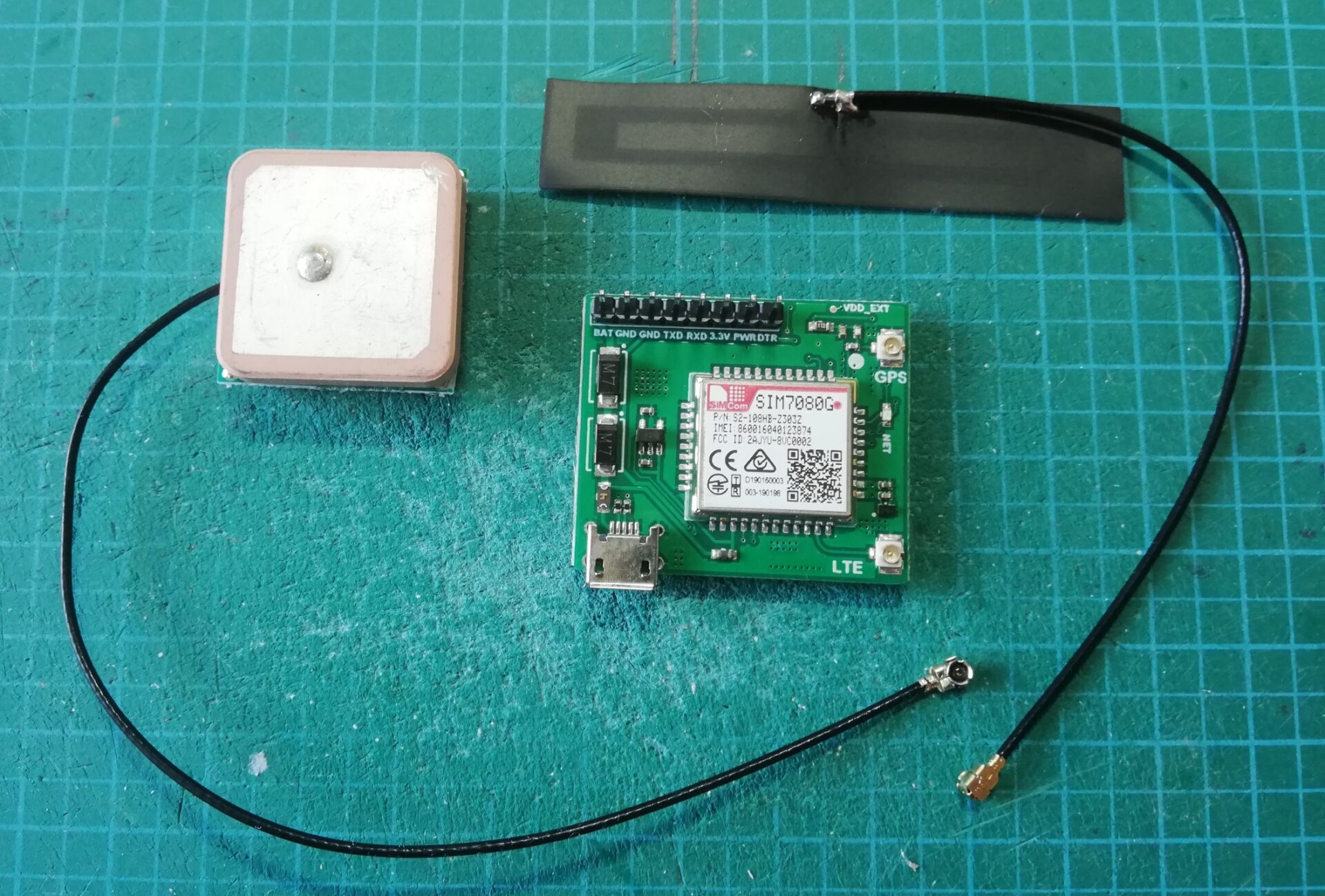
M5Stack UnitCatM 番外編 SIM7080G EVAボードを楽しむ
これまではM5Stack製の SIM7080G CAT-M/NB-IOT Unitをつこて色々検証してきました。 [bc url="https://shop.m5stack.com/products/sim7080g-cat-m-nb-iot-unit?variant=4049380216030...
IoT 2021.10.9 お父ちゃん ![]()

M5Stack UnitCatM で運用とエイジング
前回は通信基地局の位置情報取得について記載いたしました。 https://homemadegarbage.com/catm05#%E5%AE%9F%E9%A8%93%E7%B5%90%E6%9E%9C 目標 本件の目標は以下の通りです。 格安データSIM探...
IoT 2021.10.6 お父ちゃん ![]()

M5Stack UnitCatM で位置情報取得
前回はシステムの消費電力測定とデータSIMの契約について記載いたしました。 https://homemadegarbage.com/catm04#%E7%9B%AE%E6%A8%99 目標 本件の目標は以下の通りです。 格安データSIM探して契約:IIJmioに決定 ...
IoT 2021.9.28 お父ちゃん ![]()

M5Stack UnitCatM の 消費電力とデータSIM契約
前回はコントローラにSeeduino XIAOを選定し、通信動作を確立しました。 https://homemadegarbage.com/catm03#%E7%9B%AE%E6%A8%99 目標 本件の目標は以下の通りです。 格安データSIM探し...
IoT 2021.9.25 お父ちゃん ![]()
M5Stack UnitCatM を Seeeduino XIAO で制御
前回はUnitCatM によるHTTP通信を確認しました。 https://homemadegarbage.com/catm02 ここではUnitCatM を制御するマイコンの検討を行いました。 目標 本件の目標は以下の通りです。 格安データSIM探して...
IoT 2021.9.19 お父ちゃん ![]()
M5Stack UnitCatM で HTTP通信
前回はUnitCatM Unitにスマホで使用しているSIMをぶち込んでpingなどで通信を確認いたしました。 https://homemadegarbage.com/catm01 引き続きいじくりましたので報告いたします。 目標 前回ぶちあげ...
IoT 2021.9.18 お父ちゃん ![]()

M5Stack UnitCatM を味見
M5Stackから魅力的なユニットが発売されました。 Cat.M1/NB-IoT対応の通信モジュールSIM7080Gが載ったユニットです。 [bc url="https://shop.m5stack.com/products/sim7080g-cat-m-nb-iot-unit?variant=...
IoT 2021.9.16 お父ちゃん ![]()

はじめての obniz
電子工作の知識共有サイト『elchika(エルチカ)』にて obniz を用いたコンテスト(投稿受付期間:2021/4/12 ~ 5/16) の案内がございました。 [bc url="https://elchika.com/promotion/obniz2021/"] なんと事前にアイディアを申...

Maixduinoと私
HomeMadeGarbage Advent Calendar 2020 |17日目 SiPEED Advent Calendar 2020|17日目 私がSipeed Maixduinoで行ったことを、良い機会ですのでここでまとめたいと思います。 MaixduinoはSipeed 社のK21...
Advent Calendar / IoT / 金魚水槽 2020.12.17 お父ちゃん ![]()
Raspberry Pi で 金魚水槽管理システム を構築
HomeMadeGarbage Advent Calendar 2020 |4日目 Raspberry Pi Advent Calendar 2020 |4日目 これまでESP32等で構成していた我が家の金魚水槽システムですが、 この度メンテナンスのし易さや拡張性の高さから制御をRaspber...
Advent Calendar / IoT / Raspberry Pi / 生活 / 金魚水槽 2020.12.4 お父ちゃん ![]()

新型コロナウイルス接触確認アプリ COCOAカウンター を Leafonyで作製
厚生労働省が提供する、新型コロナ陽性登録した人との接触を知らせてくれるアプリ COCOA の周辺での起動数をカウントするデバイスを先日いただいた Leafony で製作しました。 https://homemadegarbage.com/leafony01 COCOA...
IoT 2020.7.24 お父ちゃん ![]()