ロボット犬『Mini Pupperミニぷぱ』もろもろ調整
前回は提供いただいたロボット犬『Mini Pupperミニぷぱ』を組み立てて基本動作の確認を行いました。
ここではもろもろ確認・調整を実施しましたので報告いたします。
目次
サーボ動作確認
ミニぷぱ専用カスタムマイクロサーボの動作が気になったのでみてみました。
マニュアルではサーボの初期位置を気にすることなく組立てが進められ、
軸も360°回転し続けたので何か特別なサーボで特別な制御なのではと思ったのです。
グルングルンまわるから可動範囲広いのかと思たけど
180°と普通だなロボット製作時に気を付けないと補正して
実動作時に可動範囲超えることもあるんじゃなかろうか?出荷時は0°になってて大きく外さなければ問題ないということなんだろうけど#MiniPupper #ミニぷぱ pic.twitter.com/rZHsYGYK0f
— HomeMadeGarbage (@H0meMadeGarbage) February 6, 2022
確認してみたところサーボはPWMのパルス幅によって位置が決められており、
その範囲も180°といたって普通のPWMサーボでした。
軸が回り続けるのは不思議ですが。。
恐らく出荷時はサーボの軸位置が約0°になっていて、組立て時に大きく動かなければ問題ないということなのでしょう。
しかし、場合によっては補正時や実動作時に可動範囲超えることもあるんじゃないでしょうか?
要注意です。
休憩
可愛いからみてください。
SHISEIGYO-2 Walkerと一緒に撮影しました。
Sumo Wrestling pic.twitter.com/nEs5VgBVty
— HomeMadeGarbage (@H0meMadeGarbage) February 6, 2022
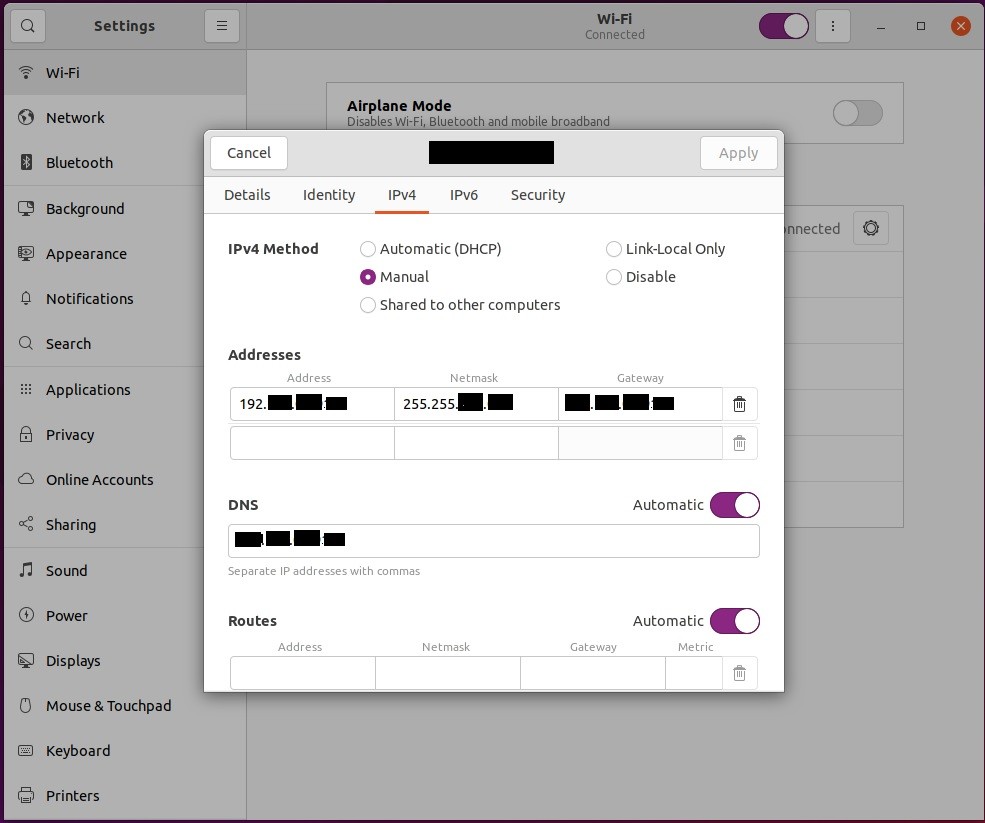
IP固定
ミニぷぱ起動時にスムーズにSSH通信などを実施するために
IP固定しました。
Ubuntuのシステム設定画面で簡単に実施できました。
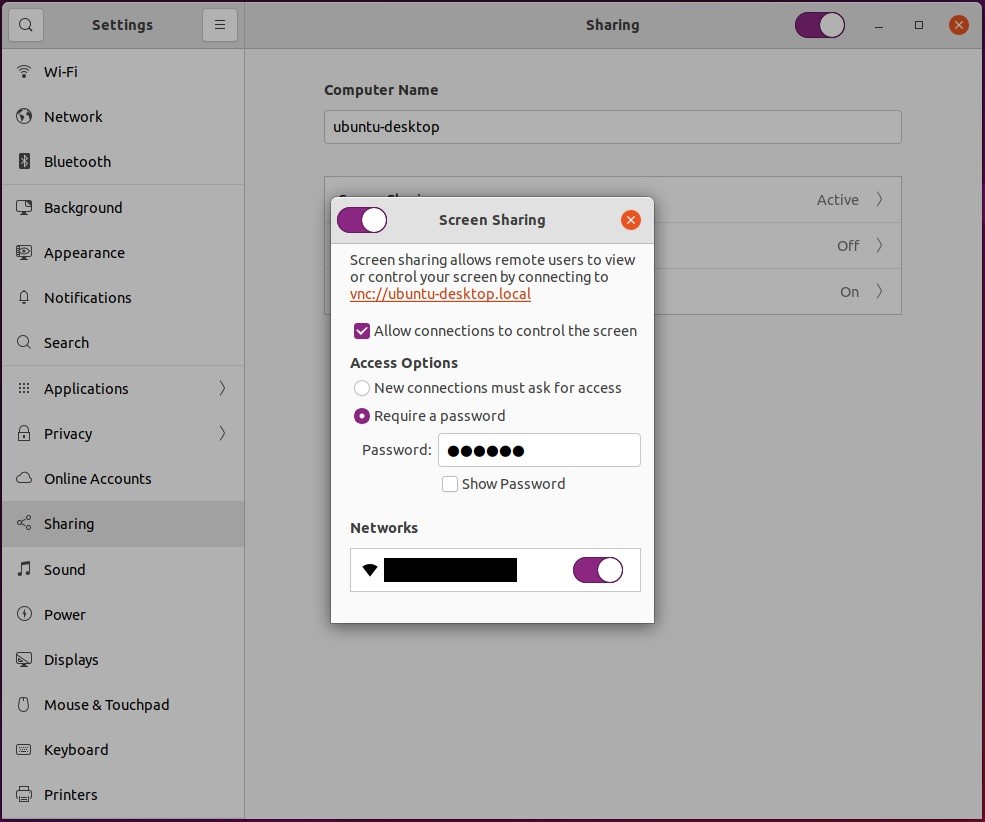
VNC設定
外部PCで画面共有して色々いじりたいのでVNC設定を実施しました。
こちらもUbuntuのシステム画面で設定できます。
Windows PCの UltraVNCで画面共有を確認することができました
(なぜかVNC Viewerだと画面が真っ黒でうまく表示されなかった)。
VNCパスワード消滅
上記のようにVNC設定して一旦リブートするとVNCパスワードがリセットされてしまいアクセスできない問題が発生しました。
毎度起動のたびにパスワードが空白になってしまうのです。
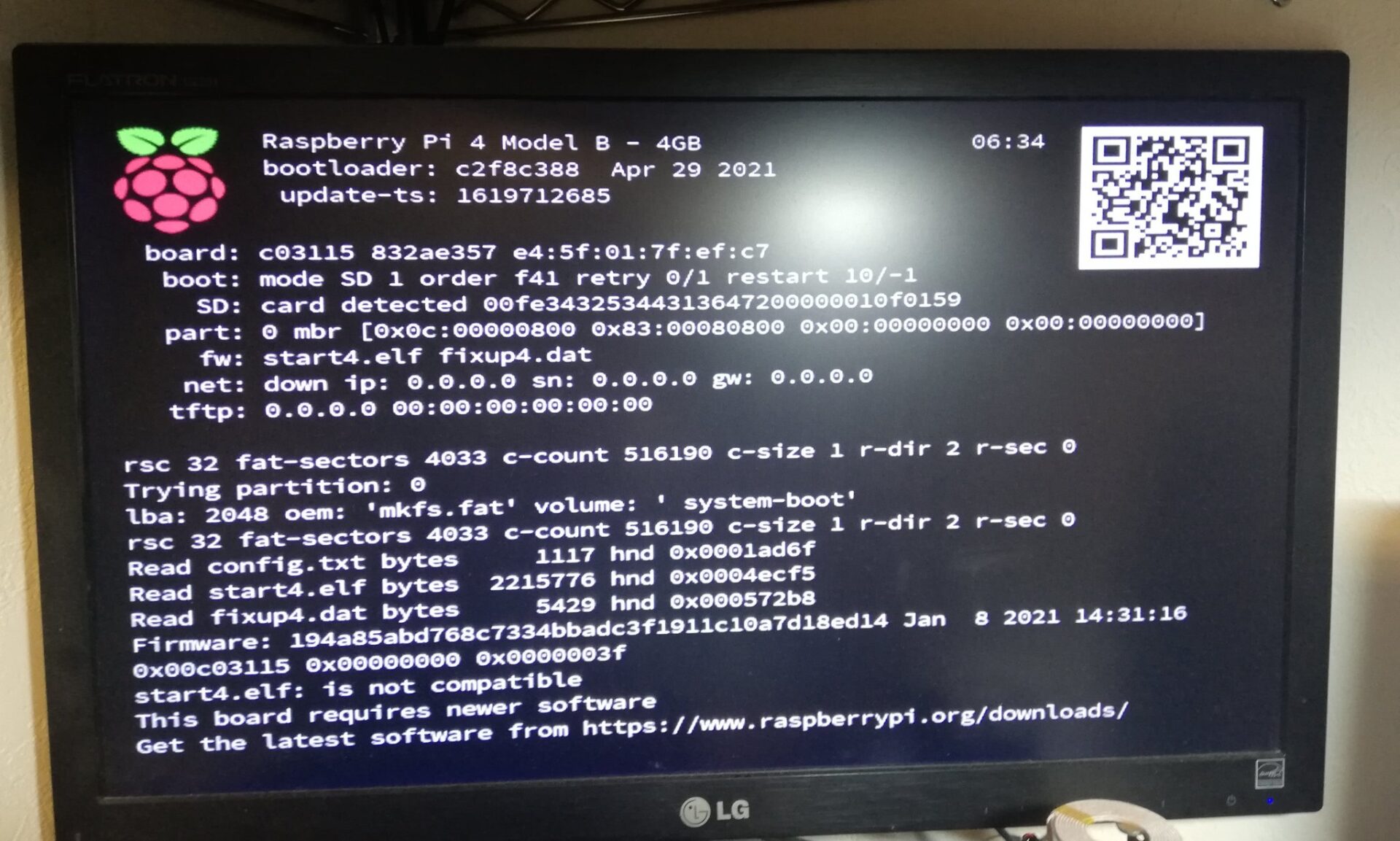
ここでUbuntuのバージョンは21.10ですが、20.04なら問題ないとの情報をいただきSDにUbuntu 20.04のイメージを焼いてみましたが、使用しているラズパイ4では起動しませんでした。
イメージファイルは以下でDL
https://drive.google.com/drive/folders/17XOR7FHEMkts_zZtZtuQ-QxEJ68U8ZkW
↓Ubuntu 20.04のイメージファイルでは”This board requires the new software”と出て起動しなかった。
VNCについてはTigerVNCなど別ソフトを試すか、
今後ROSを使用するならUbuntu 20.04のほうがいいとのことなので、最新モデル向けのUbuntu 20.04イメージファイルの更新を待つことにします。
ROSなるものを使用するとなんかすごいことができそうなのです。
今のところ全くよくわからないけど。。
ROS使うと地図作成したりナビゲーションしたりがわりと簡単にできちゃうようになるのでぜひ!!https://t.co/CPNDycOh0z
— たいりょーくん (@Tiryoh) February 6, 2022
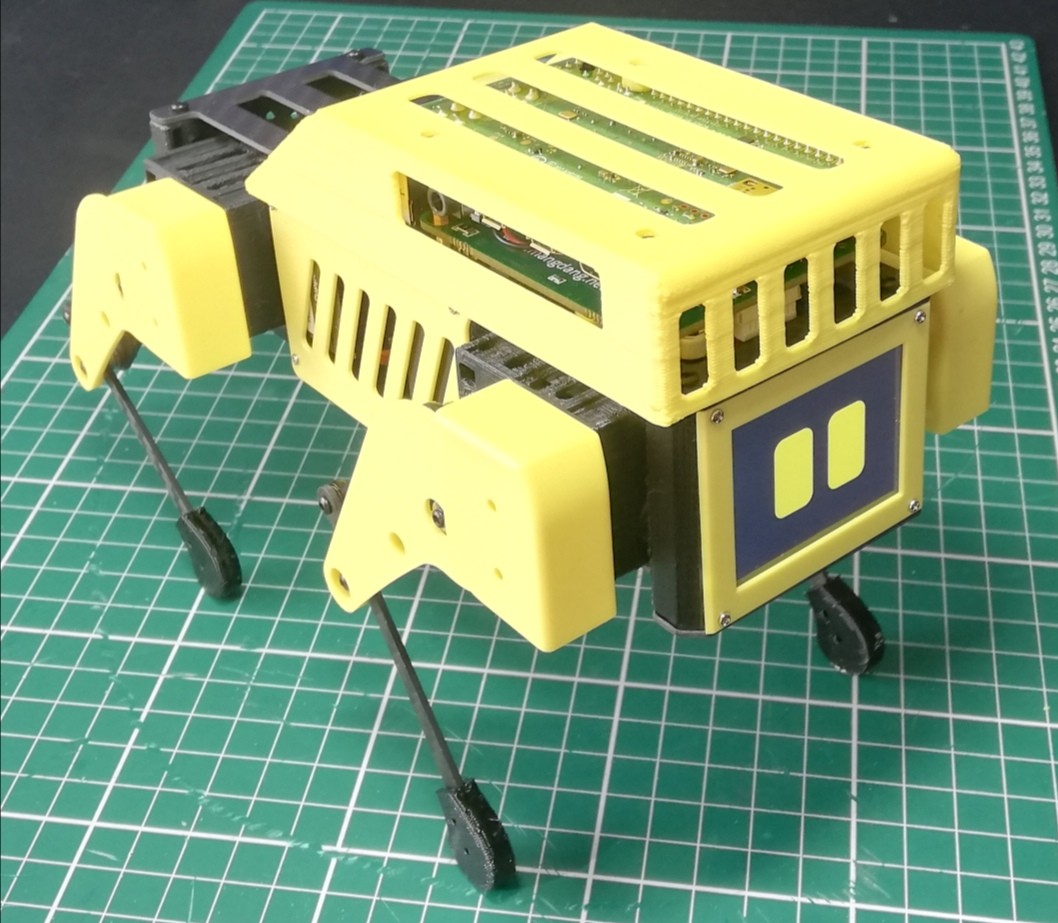
筐体完成
前回の組立て時に M1.4精密ネジが同梱されておらず一部筐体が未完成でした。
あれ?M1.4ネジなんてないぞ?
#MiniPupper #ミニぷぱ pic.twitter.com/tF76xW5SsA— HomeMadeGarbage (@H0meMadeGarbage) February 5, 2022
ホームセンターでネジ (M1.4 × 3mm)を買ってきました。

ばっちり完成!めちゃくちゃカワイイ!!
おわりに
ここではサーボの単体動作確認と、よりよくミニぷぱを使用し勉強するためにネット環境調整を実施しました。
一部問題もありますが随時更新したいと思います。
次は足を自由自在に動かせるようになりたいです。
今のところ全くどうやって動いているのか理解できていません。
勉強します!