2023年 SPRESENSE活用コンテスト への道⑫ ー四脚ロボットー
本記事にはアフィリエイト広告が含まれます。
前回はSPRESENSEによる屈伸型倒立振子を製作し動作確認しました。
いよいよ 2023年 SPRESENSE活用コンテスト への応募に向けて、ロボット製作を進めます。
ここではまず四脚ロボットを製作し基本動作を確認します。
目次
筐体製作
以前製作したロボット犬と同様にシリアルサーボ STS3032を用いて製作を進めます。
3Dプリントした筐体ベースにSPRESENSE を固定し シリアルサーボSTS3032による足を接続します。
足#SPRESENSE pic.twitter.com/u4NjHdhnam
— HomeMadeGarbage (@H0meMadeGarbage) January 9, 2024
起動#SPRESENSE pic.twitter.com/MCYVKmimfD
— HomeMadeGarbage (@H0meMadeGarbage) January 9, 2024
参考

動作
電源はロボット犬の時と同様に、2セルLiPoバッテリ(7.4V)でサーボに給電してDCDC電源モジュールで5V降圧してSPRESENSEに給電しています。
屈伸・足踏み
クモのような足配置にしたので体の高さを大きく変えることができます。
あまり可愛く仕上がらなかった。。
かわいい#SPRESENSE pic.twitter.com/Zs6hCWXCmz— HomeMadeGarbage (@H0meMadeGarbage) January 9, 2024
バランス動作
足高さを大きく変動できるのでダイナミックに姿勢保持!
balance#SPRESENSE pic.twitter.com/5o0RjbMbuy
— HomeMadeGarbage (@H0meMadeGarbage) January 9, 2024
歩行
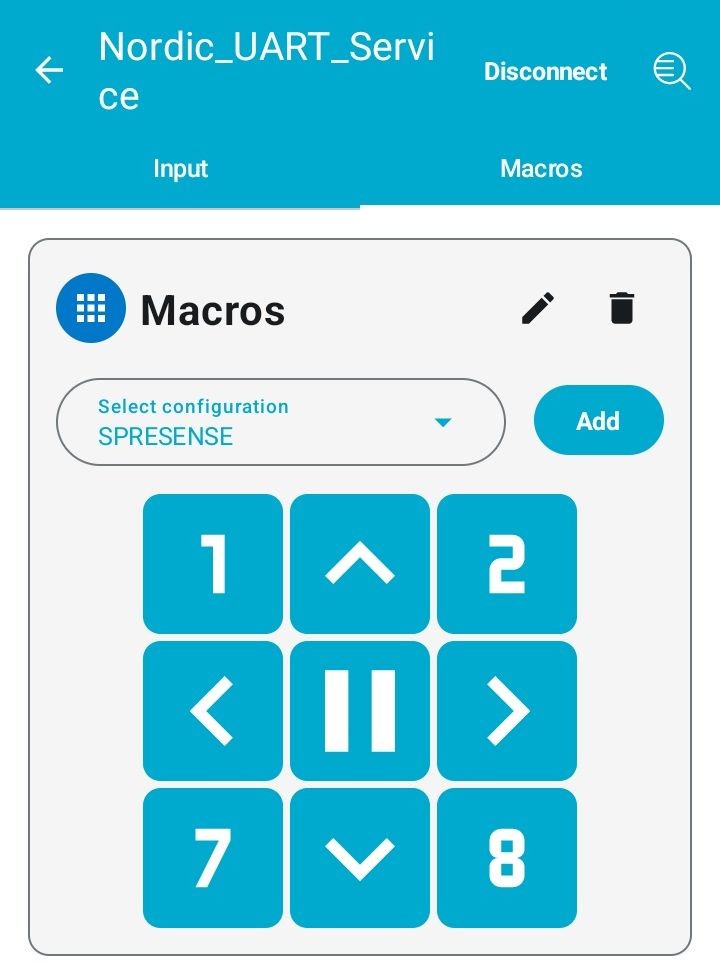
歩行や動作モードの制御はSPRESENSE用BLEボード BLE1507によるBLE通信でスマホで実施しています。
スマホアプリ nRF Toolbox のマクロ機能でボタン操作で文字列を送って制御しています。
おわりに
ここではSPRESENSEによる四極ロボットを楽しみました。
本道を通じてSPRESENSEとの距離もかなり縮まり、 2023年 SPRESENSE活用コンテスト ロボット部門応募に向けての検証もいよいよ次が最後となります。
ソコ ニ. イ ル.ヨ . pic.twitter.com/8lVffbzfS8
— HomeMadeGarbage (@H0meMadeGarbage) January 9, 2024
それでは次回の最終回でまたお会いしましょう。