
100均
またガンプラ熱にやられている5
さて相変わらずプラモデル作ってますよ。 以前製作したジムのスタイルが凄くよくて、このスタイルと同等のガンダムが欲しくなっちゃいました。 手持ちのガンダムだとなんかスタイリッシュというか細いというか。。 マッシブでジムのようにロボットらしいガンダムがいいなぁと。 https://twitter...
工作・ハンドメイド 2023.10.12 お父ちゃん ![]()

ダイソー で プラモ用のディスプレイスタンド を買った
ダイソー で プラモ用のディスプレイスタンド を買いました。 前々からほしかった商品なので大変うれしかったです。 プラモデル 去年 (2022年) から子供のころ以来でプラモ製作に目覚めまして、ちょくちょく作っていたわけですが。。 https://homem...
生活 2023.7.30 お父ちゃん ![]()
SHISEIGYO-1 Walker 参 を実現させたい俺5 ー歩行検討3ー
だいぶ期間があいてしまいましたが、シリアルサーボLX-244で足を構築しリアクションホイールでバランスをとる二足歩行ロボット"SHISEIGYO-1 Walker 参" の歩行検討を実施いたしました。 前回は歩行動作の自動化を目指し歩行動作をプログラミングしましたが上手くいかず、サーボのギアに...
電子工作 2022.9.8 お父ちゃん ![]()

汚し塗装 ーガンプラへの道4ー
前回はエントリーグレードのガンダムにスジボリ~デカール貼り~トップコートを実施してきれいに仕上げました。 https://homemadegarbage.com/gunpla03 [amazonjs asin="B097NQ1NVR" locale="JP" title="ENT...
工作・ハンドメイド 2022.4.13 お父ちゃん ![]()

ディテールアップと仕上げ ーガンプラへの道3ー
前回はエントリーグレードのガンダムに部分塗装と穴埋め加工を一通り施しました。 https://homemadegarbage.com/gunpla02/ [amazonjs asin="B097NQ1NVR" locale="JP" title="ENTRY GRADE 機動戦士ガンダム RX-...
工作・ハンドメイド 2022.4.12 お父ちゃん ![]()

部分塗装と穴埋め ーガンプラへの道2ー
前回、ガンプラ作りたい欲を抑えきれず"ガンプラへの道"を開通し基本工作による組み立てを実施しました。 https://homemadegarbage.com/gunpla01 [amazonjs asin="B097NQ1NVR" locale="JP" title="ENTRY...
工作・ハンドメイド 2022.4.10 お父ちゃん ![]()

ガンプラへの道 爆誕
長男くんがプラモデル製作を楽しむようになり(私も積極的に買い与えるので)、嬉しく眺めていたのですが。。。 最近ドンドン自分でも作ってみたい欲が高まっておりまして 長男くんのプラモデルを修正するなどして満たそうとしておったのです。 ガッツリ プラモデル作りたい気持ちあるけど なんだか踏み出...
工作・ハンドメイド 2022.4.9 お父ちゃん ![]()

100均のソーラーパネルと SPRESENSE でバッテリーレス ロガー製作
前回は100均のソーラーパネルで Raspberry Pi Pico を駆動してみました。 https://homemadegarbage.com/solarpico このときSPRESENSE も動かしてみて報告しています。 ここではSPRESENSE でロガーを製作してみましたので報告させ...
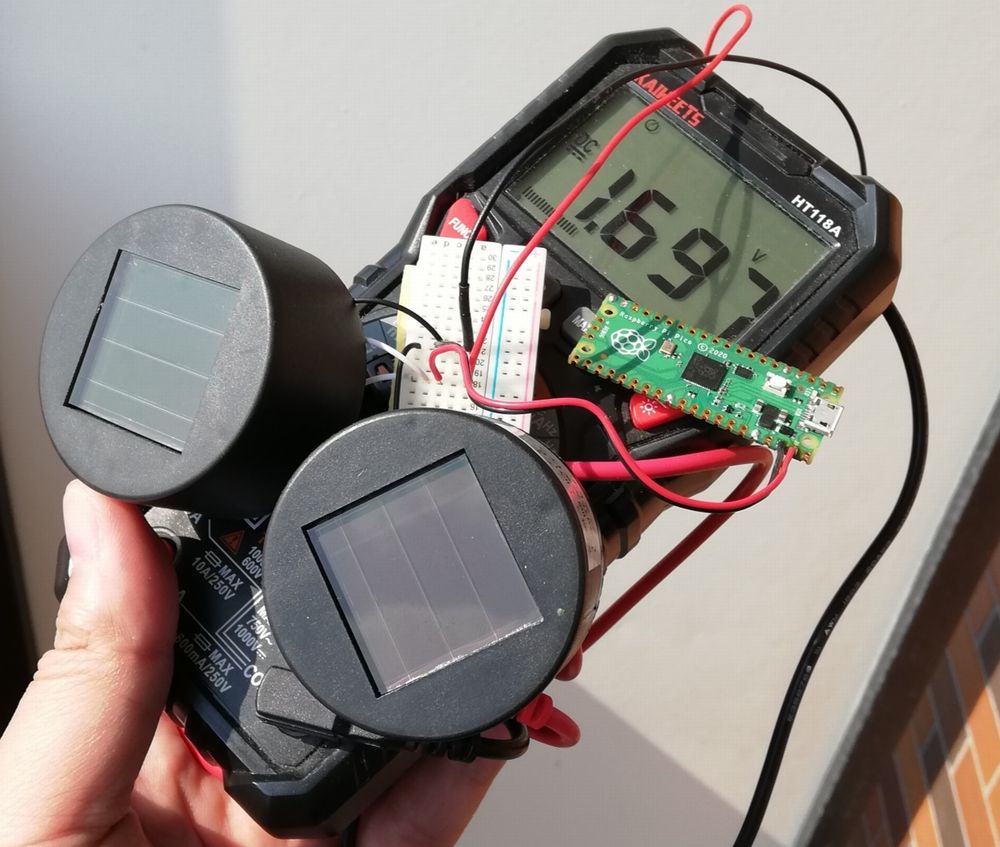
100均のソーラーパネルで Raspberry Pi Pico を駆動
ネットで面白い記事を見つけました。 [bc url="https://fabcross.jp/news/2021/20210414_sensignal_spresenseexpansionboard.html"] Spresense用の拡張ボード発売の記事で ”一旦起動すると2V付近まで電圧が...
Raspberry Pi / ソーラー発電 / 電子工作 2021.4.20 お父ちゃん ![]()
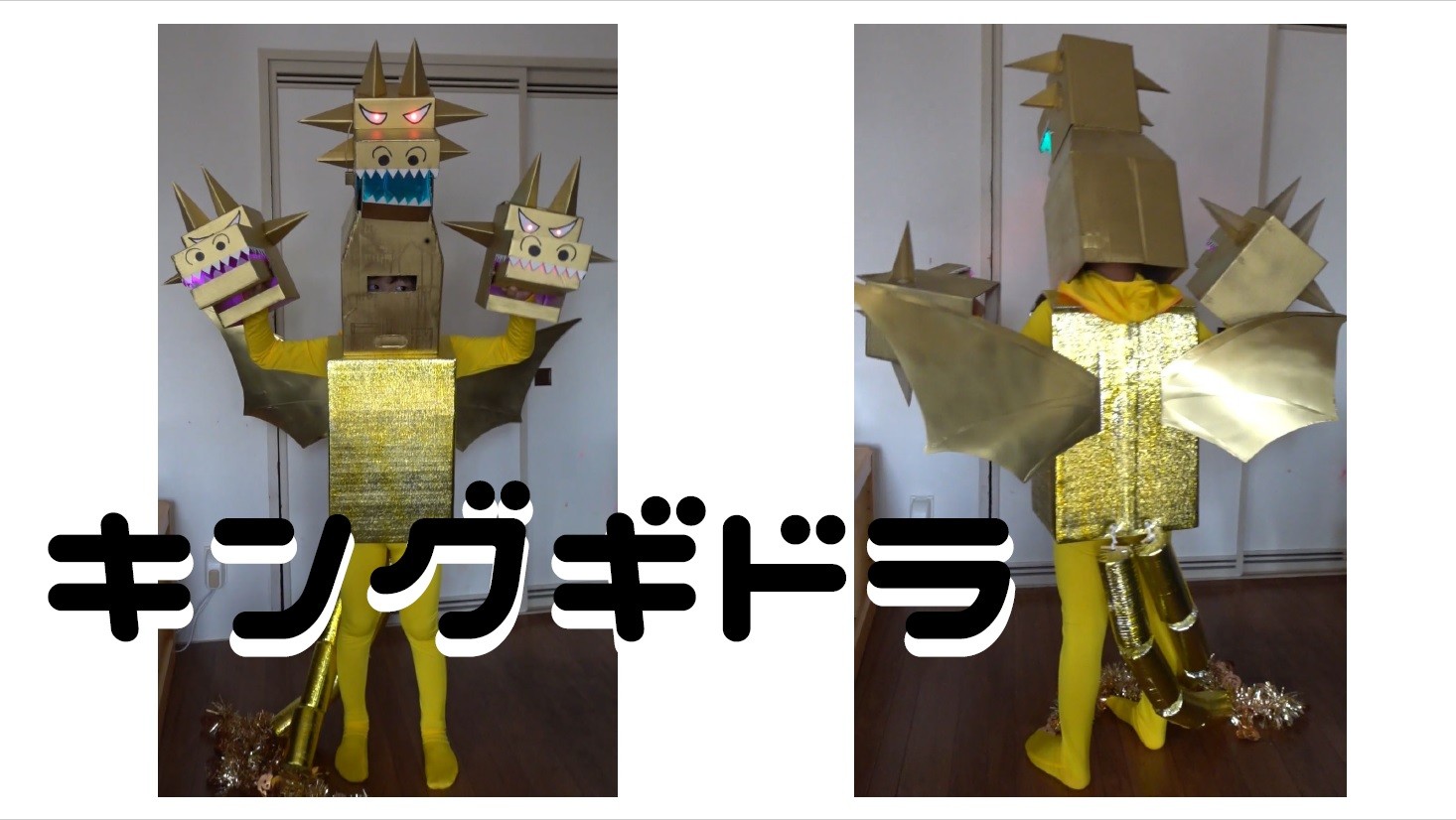
ダンボール キングギドラ コスプレ衣装の製作
去年はゴジラのコスプレでハロウィンパレードに参加して楽しんだ長男くん https://homemadegarbage.com/godzilla/ 今年も半年以上前からハロウィンに どんな格好するかをいつも考えていたのですが。。。 残念ながら今年はハロウィンイベントが中止。。。 それでもずーっ...

オリジナルプロッタ eddyWrite の吟味
オリジナルプロッタ eddyWriteにつきまして、前回は逆運動学を用いて文字や図形の直交座標からスライド量(半径)、回転量(角度)を割り出しての描画に挑戦いたしました。 しかしeddyWriteはクルクル回りながら描画するのが味わいがあるという結論に至りました。 ほっほっほ。 https:...
電子工作 2020.3.12 お父ちゃん ![]()
オリジナルプロッタ eddyWrite を逆運動学 で制御
自作のプロッタeddyWrite これまでは画像を極座標変換したデータをもとにクルクルと描画してきたのですが、文字や図形をすらすら縦横無尽に描かせたくなりました。 だってプロッタだもん。 ロータリーエンコーダ ここでは極座標データでeddyWriteを制御するの...
電子工作 2020.3.4 お父ちゃん ![]()
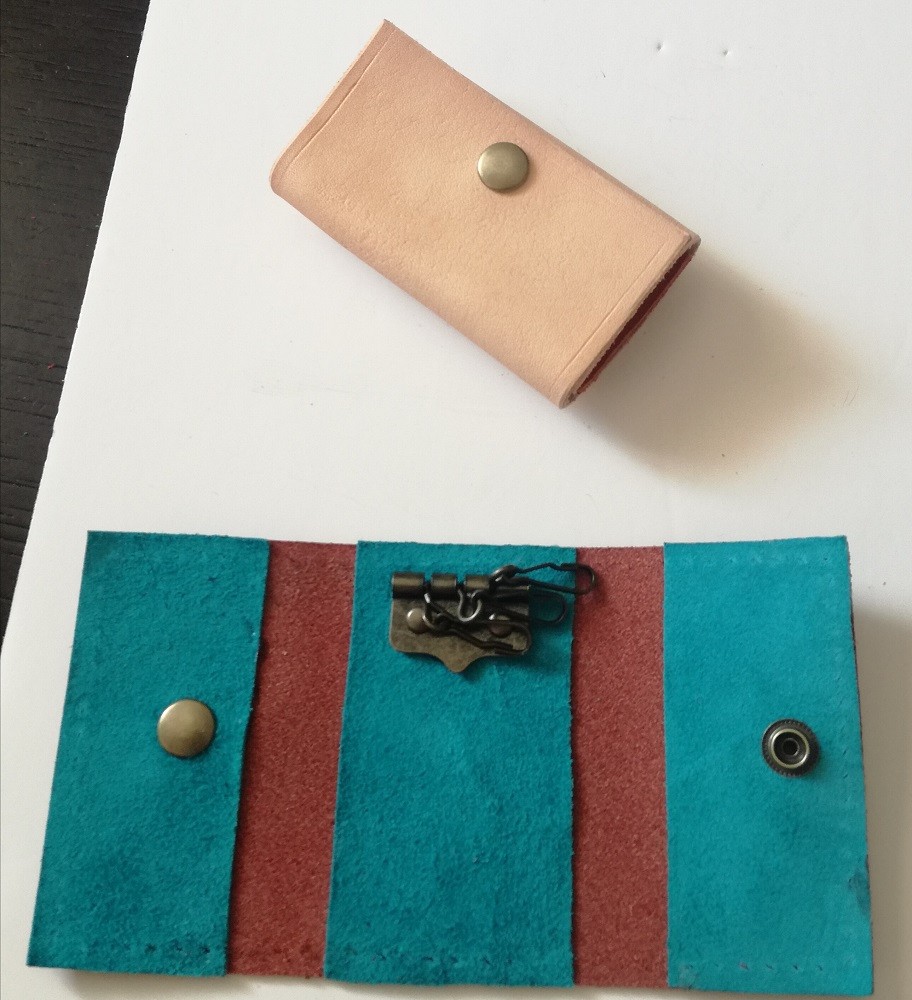
はじめてのレザークラフト – キーケース製作 –
ワカサギ釣りの帰りに東急ハンズによって見たら、なんとレザークラフトのワークショップが開催されていました。がま口財布かペンホルダーを製作できるークショップでした。 View this post on Instagram ...
工作・ハンドメイド 2019.2.14 お父ちゃん 
ハロウィン用 LED マスク『ヒトミちゃん』
お母ちゃんが今年はハロウィンの仮装で巷の子供たちを驚かしたいと言うので、恐ろしいマスクを目指して お父ちゃんが腕をふるいました。 ダイソーのハロウィングッズのホラーマスクを加工してLED付けてみました :twisted: 構成 テープLEDでひとつ目を構成し、マイクも取り付けて声でマスクの...
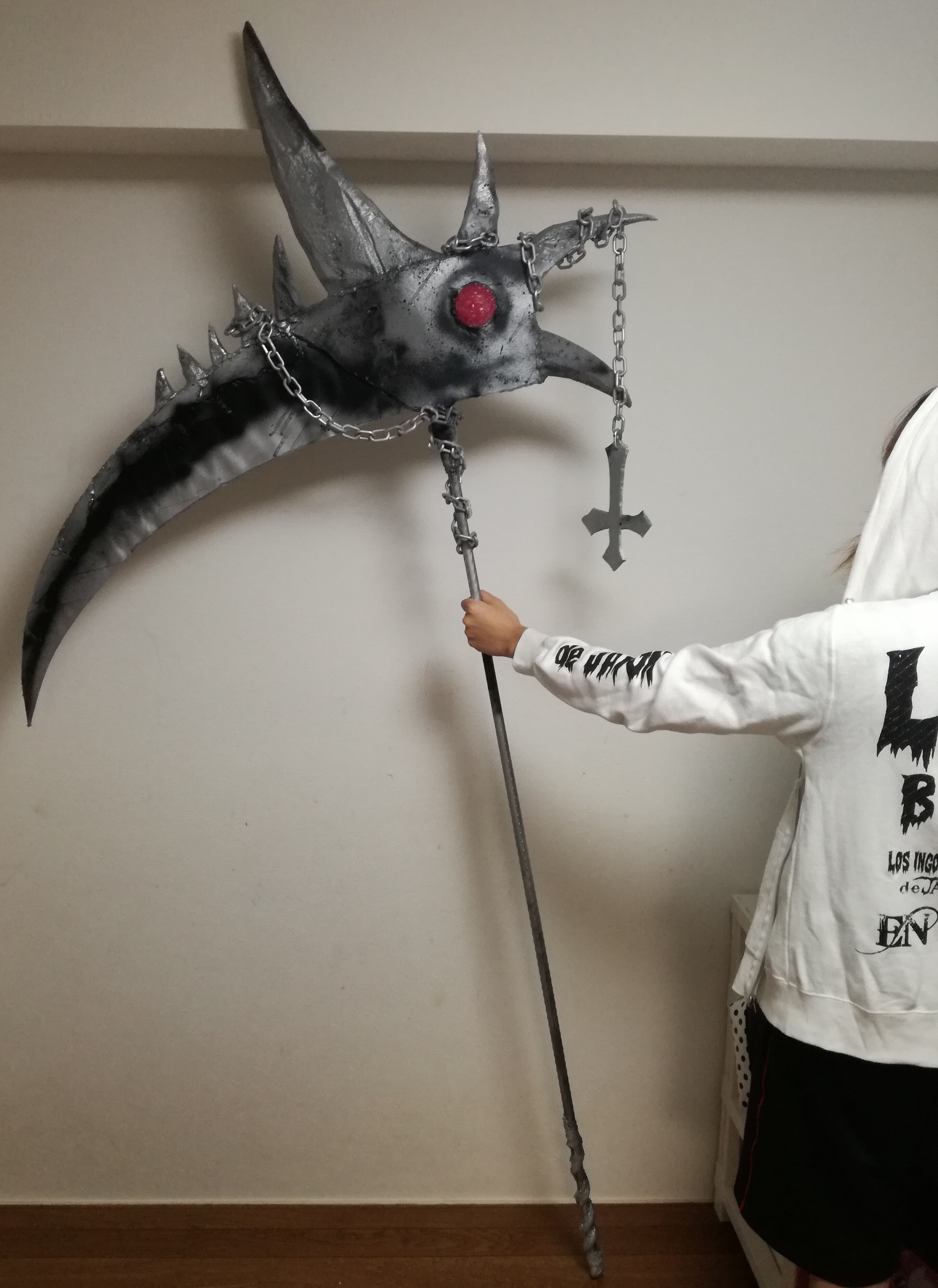
“キング・オブ・ダークネス” EVIL の鎌を自作
もう10月。毎年思うけど一年早すぎる! ハロウィンが目の前に迫ってきていますね。去年は家族大半体調不良で断念しましたが今年はみんなで仮装してトリック・オア・トリートの予定でいます! 私 お父ちゃんの人生初の仮装は “キング・オブ・ダークネス” EVIL に決定いたしました!EVILといえば入場時...