
MPU6050
特殊球体ホイール バランスロボット SHISEIGYO-2 Go 弐
HomeMadeGarbage Advent Calendar 2021 |7日目 以前製作した球体ホイールによるバランスロボットを改良いたしましたので報告いたします。 https://homemadegarbage.com/reactionwheel41 SHISEI...
Advent Calendar / 電子工作 2021.12.7 お父ちゃん ![]()

姿勢制御検討2 ードローンへの道3ー
前回から随分時間がかかってしまいましたが、これまでの進捗報告をさせていただきます。 https://homemadegarbage.com/drone02 姿勢制御検討 前回に引き続きホバリングの実現を目指して、姿勢制御の検討を実施していました。 基本的には前回...
姿勢制御検討 ードローンへの道2ー
前回は Makerfabs 様よりいただいた基板 ESP32 6- Axis IMU を用いてドローン製作を決意いたしました。 https://homemadegarbage.com/drone01 ここではプロペラを制御してドローンの姿勢を制御するべく検討いたしましたので報告します。 &nb...
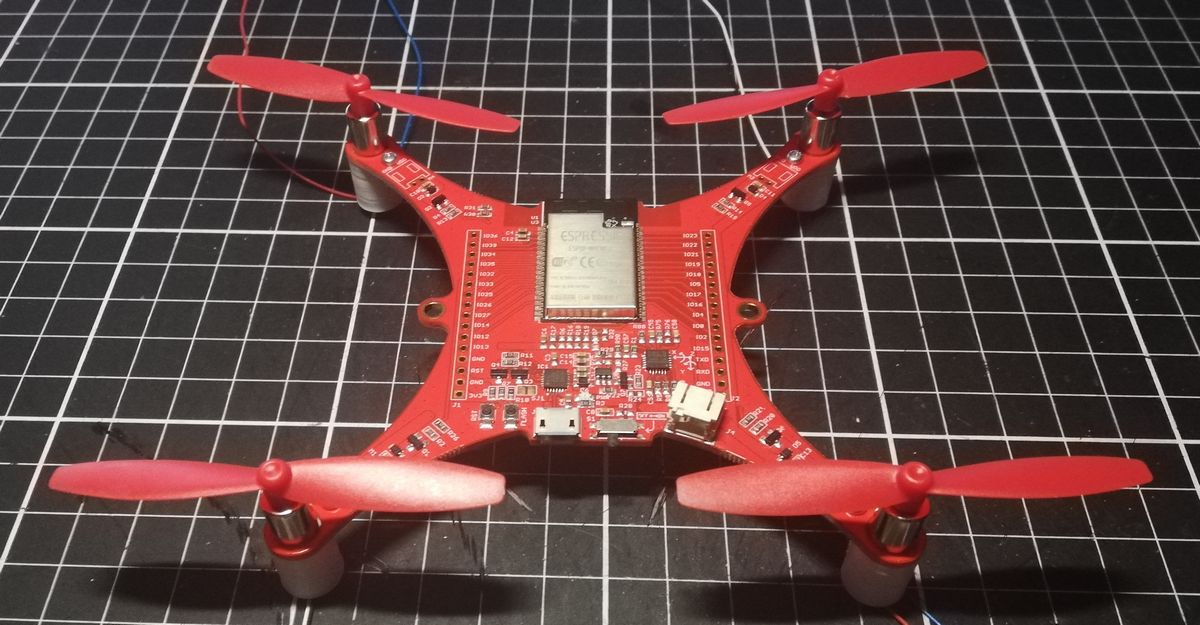
ドローンへの道 爆誕 ードローンへの道1ー
以前に Makerfabs 様より素晴らしい製品をたくさんいただきました。 いただいた製品の中に ESP32 6- Axis IMU というドローン製作にピッタリの製品がございました。 ずーっとドローンを作ってみたいなと思っておりましたので、ここに道を開通したく存じます。 ...
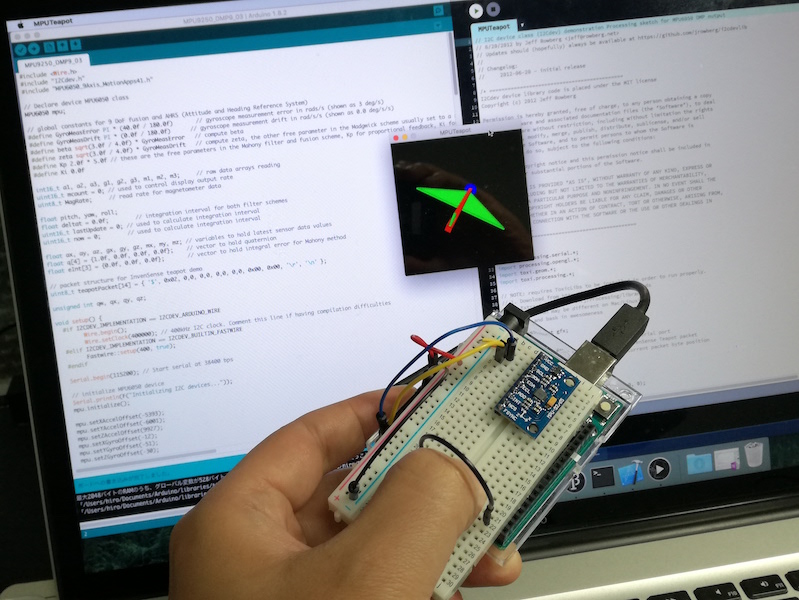
モーションセンサ比較 - MPU6050 vs MPU9250 vs BNO055 –
モーションセンサが3種ほどそろったので基本動作確認で簡単に比較してみました。 MPU6050 6軸モーションセンサ (3軸加速度+3軸ジャイロ)です。安定のHiLetgoで購入。 [amazonjs asin="B019664RAM" locale="JP" title="KKHMF ...
電子工作 2017.5.16 お父ちゃん 

モーションセンサ BNO055 モジュールの動作確認
先日Adafruitで購入したモーションセンサBNO055の基本動作確認を実施しましたので記載します♪ https://homemadegarbage.com/hackster-02 構成 部品 マイコン Arduino UNO [amazonjs asin="B008GRTSV...
電子工作 2017.2.26 お父ちゃん

測距センサ VL53L0X を用いた身長測定器
子供って長時間じっとできないので身長をはかるのってなかなか大変。。。 そこで低価格で高精度のセンサを見つけたので場所と時間を取らない身長測定器をつくりました。 構成 距離センサ VL53L0X 標準が120cmで、広範囲モードで220cmくらいまでは測定できるようです。デー...
電子工作 2016.9.17 お父ちゃん