
pov
PovRanian 作例と代替部品の紹介
ここではハンディーバーサライタ PovRanian (ポブラニアン)の 作例や代替部品の紹介を記載していきます。 製作レシピは以下で販売しております。 https://shop.homemadegarbage.com/product/povranian_recipe/ P...
電子工作 2021.7.4 お父ちゃん ![]()
Raspberry Pi Pico バーサライタ解像度向上 (C/マルチコア) ーRaspberry Pi Picoへの道7ー
前回はRaspberry Pi Pico を用いてバーサライタを製作しました。 https://homemadegarbage.com/pipico06 ここでは、表示映像の解像度向上のためにSPI複数出力とデュアルコア動作を検証しましたので報告します。 SPI複...
Raspberry Pi 2021.2.15 お父ちゃん ![]()

立体 バーサライタ – 3D POV Display –
これまで私は様々なバーサライタ(POV ディスプレイ)を製作してきました。 そうした中で何となく平面のバーサライタを立体的に積み上げて立体表示できるのではと考えておりました。 なんかめんどくさそうだし、費用もかかるだろうと思考実験の枠組みから出ないまま時は過ぎたのですが この度良い機会に恵まれ...
電子工作 2021.2.14 お父ちゃん ![]()
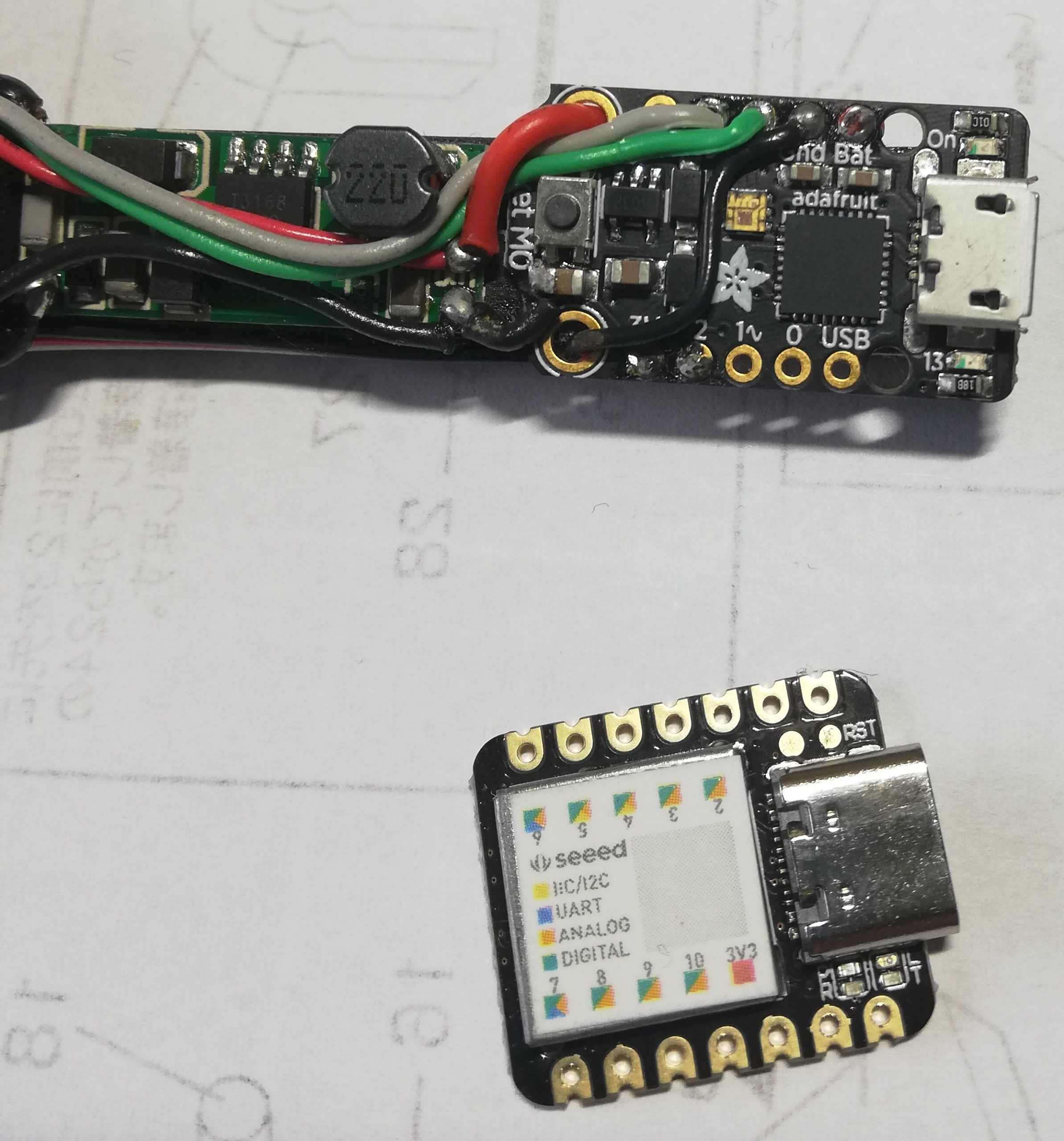
Seeeduino XIAOを使ってみた
Seeeduino XIAOという実に可愛いマイコンを購入しました。 安くて小さくて高性能でしたので紹介させてください。 [bc url="http://akizukidenshi.com/catalog/g/gM-15178/"] [amazonjs asin="B086KXY929" lo...
電子工作 2020.5.8 お父ちゃん ![]()
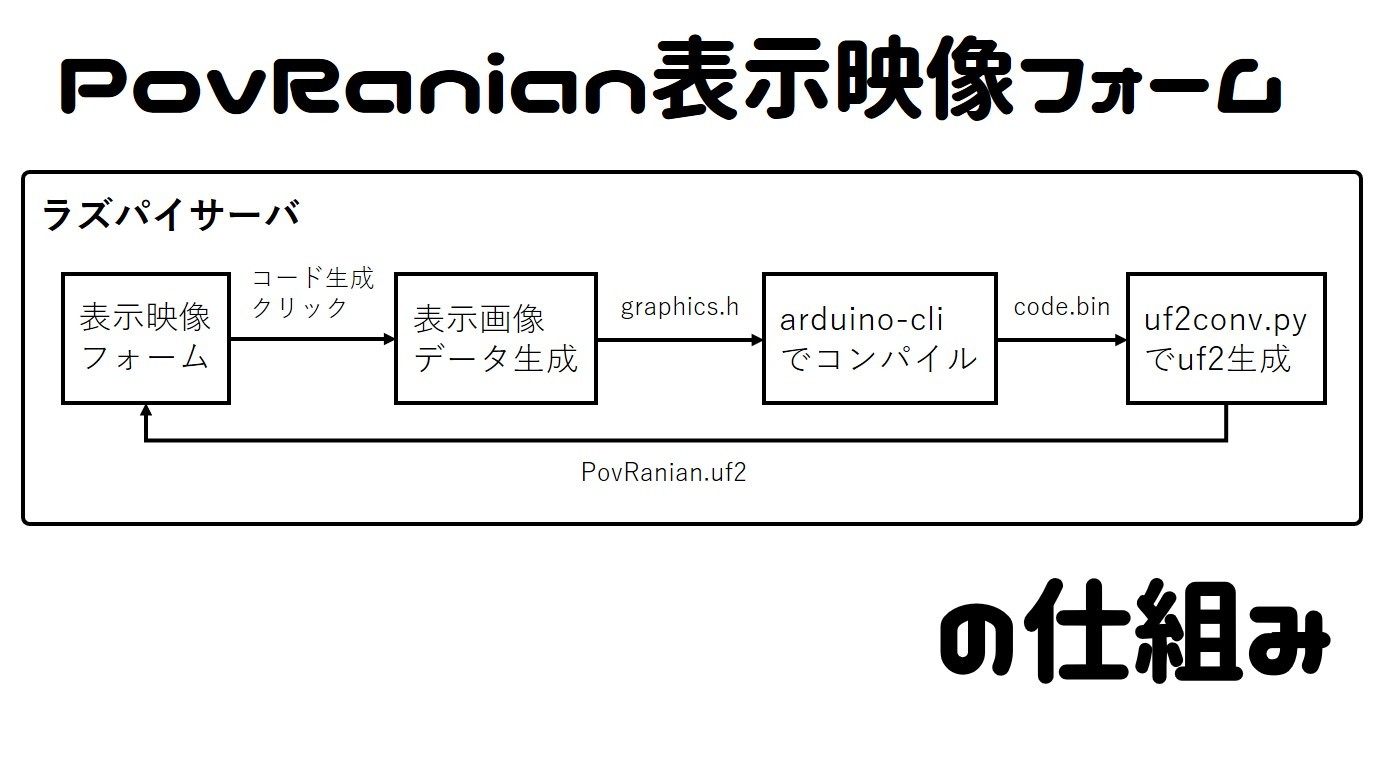
ハンディバーサライタ PovRanianの表示映像生成フォームの仕組み
Arduino Advent Calendar 2019 | 22日目 今年は念願のHomeMadeGarbageのオフィシャルショップを開店することができ、ハンディバーサライタPovRanian (ポブラニアン)を出品いたしました。 画像や図形をフルカラーで表示することができます。 ハン...
Advent Calendar / 電子工作 2019.12.22 お父ちゃん ![]()
狭ピッチ LED バーで SPRESENSE バーサライタを堪能
以前購入したじゃじゃ馬 128セルのLEDバーを用いてバーサライタしてみましたので、もう少しだけ詳しく記載いたします。 https://homemadegarbage.com/apa102-2020_01 LEDバー 使用したLEDバーはAdafruitの商品で、...
ハンディ バーサライタ PovRanian の使い方
ハンディ バーサライタ PovRanianの使用方法をご紹介します。 映像生成 表示映像フォームサイトでPovRanianに表示する映像データを生成します。 https://homemadegarbage.com/povranian-form01 コード生成...
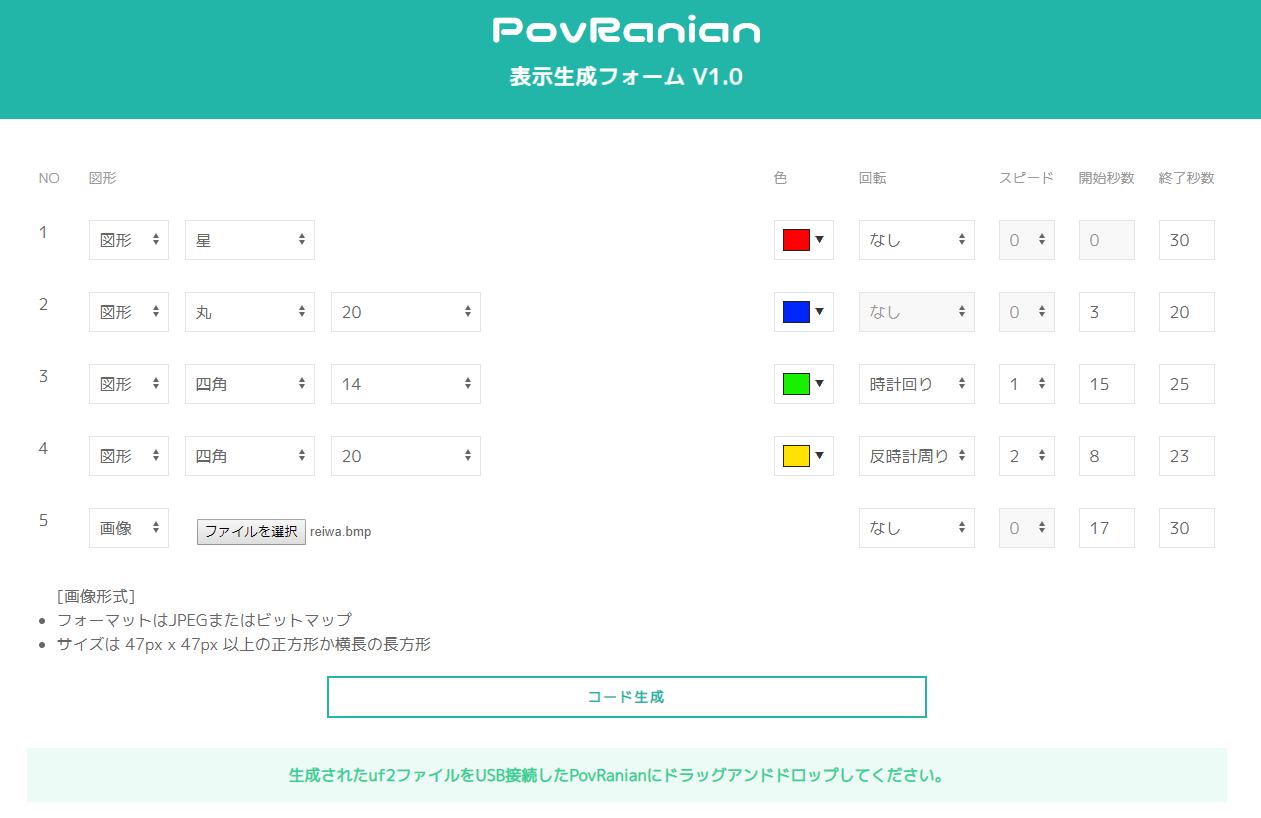
ハンディ バーサライタ PovRanian の表示映像フォーム使用方法
PovRanianに表示する映像データを生成するサイトの使用方法をご紹介します。 http://homemadegarbage.0t0.jp/PovRanian/ 基本操作 表示映像フォームの基本操作をご紹介します。 映像は最大で5種表示できます。 ...

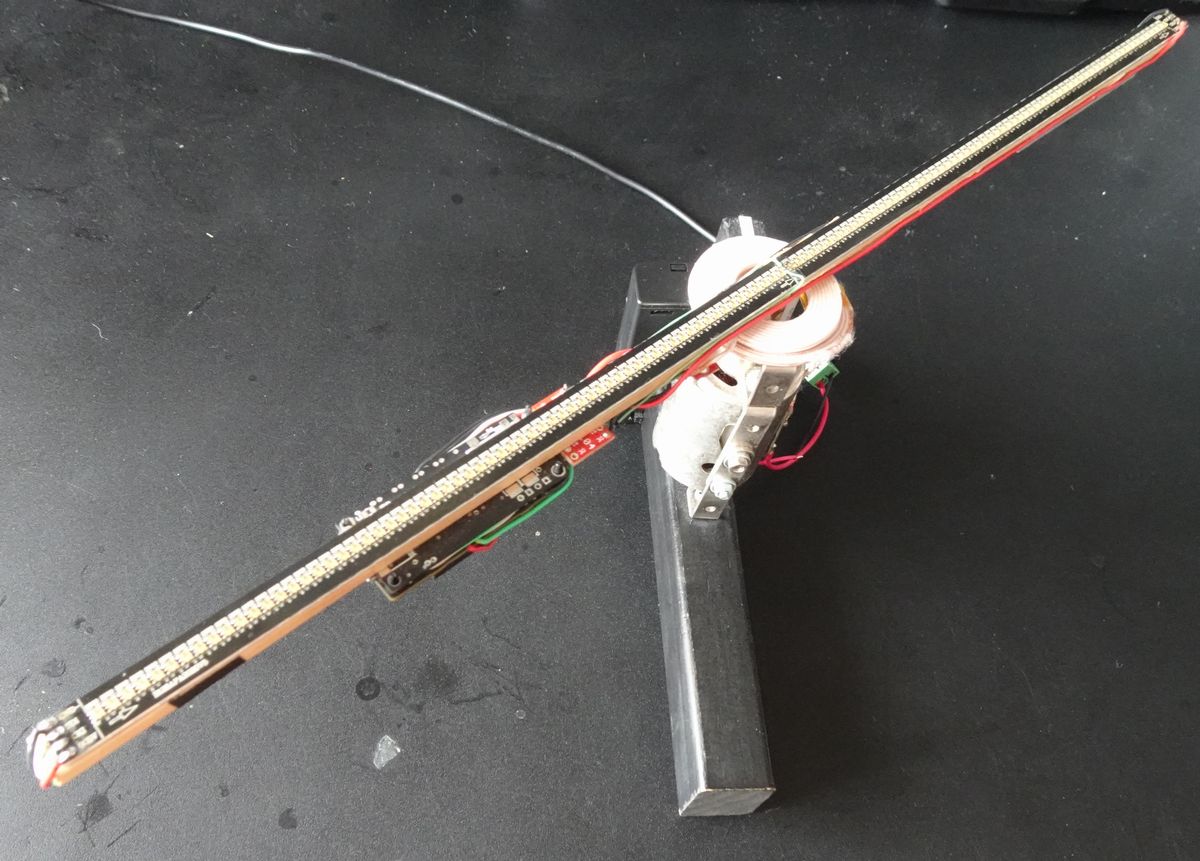
ハンディ バーサライタ PovRanian の製法
ハンディ バーサライタ PovRanian (ポブラニアン)に表示する映像を生成するサイトを立ち上げました。 画像や図形を組み合わせて空中にお好みの絵を投影できます。 ここではPovRanian 装置の製法を紹介いたします。 PovRanian表示生成フォームの使用法や Pov...

CircuitPythonをつかってみた
Adafruitが提唱するCircuitPythonなるものをつかってマイコンのコーディングをしてみましたのでご報告いたします。 マイコン向けのPython環境であるMicroPythonをAdafruit社のマイコン用に派生させたのがCircuitPythonです。Pythonのように少ない記述...
電子工作 2019.4.7 お父ちゃん 
バーサライタに映像を無線転送
前回、ESP32で割り込みやマルチタスクを駆使してバーザライタの高分解能化に成功いたしました。 https://homemadegarbage.com/pov-esp32-02 今回は画像や動画をWiFiで転送して表示に成功いたしましたのでご報告します。 UDPで...
ESP32 でバーサライタ作製
以前つくったPOV(Persistent Of Vision=残像)表示装置バーサライタのマイコンをESP32にしてみました。高速で優秀なESP32で更に無線も使えるので、表示画像をBluetoothで切り替えなども試してみました。 https://homemadegarbage.com/evil...