SHISEIGYO-1
SimpleFOC でリアクションホイール姿勢制御モジュール3
またまたブラシレスモータによるリアクションホイール姿勢制御モジュールの検討を実施しました。 過去、何度もいろいろな部品や構成でブラシレスモータ姿勢制御モジュールを製作してきました。 https://homemadegarbage.com/simplefoc03/ https:/...
電子工作 2025.7.8 お父ちゃん ![]()
SimpleFOC で3軸姿勢制御モジュール
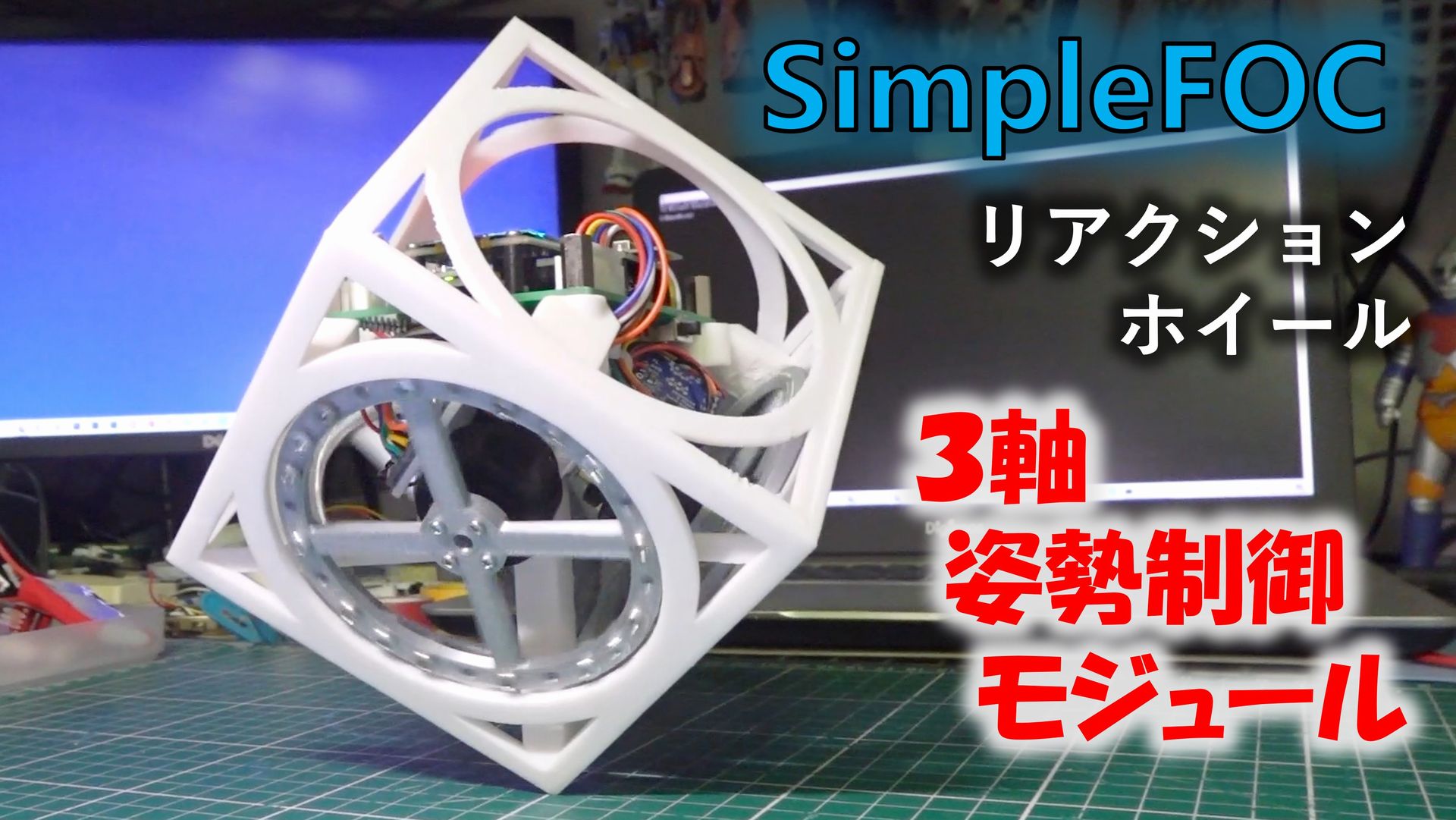
前回までにSimpleFOCによるブラシレスモータの制御での1軸姿勢制御モジュールの製作・動作確認を実施しております。 https://homemadegarbage.com/simplefoc07 ここではコレを発展させてホイール3軸での点倒立姿勢制御モジュールの製作を実施しま...
電子工作 2024.10.4 お父ちゃん ![]()

SimpleFOC でリアクションホイール姿勢制御モジュール2
前回はSimpleFOCによるリアクションホイール姿勢制御モジュールの制御を楽しみました。 https://homemadegarbage.com/simplefoc06/ モータはジンバル用の小型ブラシレスモータを使用しました。 [amazonjs asin="B09JZ56...
電子工作 2024.9.30 お父ちゃん ![]()

SimpleFOC でリアクションホイール姿勢制御モジュール
前回はSimpleFOCライブラリを用いてブラシレスモータを制御し倒立振子を製作しました。 https://homemadegarbage.com/simplefoc05/ ここではリアクションホイールによる姿勢制御モジュールを製作したので報告いたします。 ...
電子工作 2024.9.25 お父ちゃん ![]()
SimpleFOC で倒立振子1
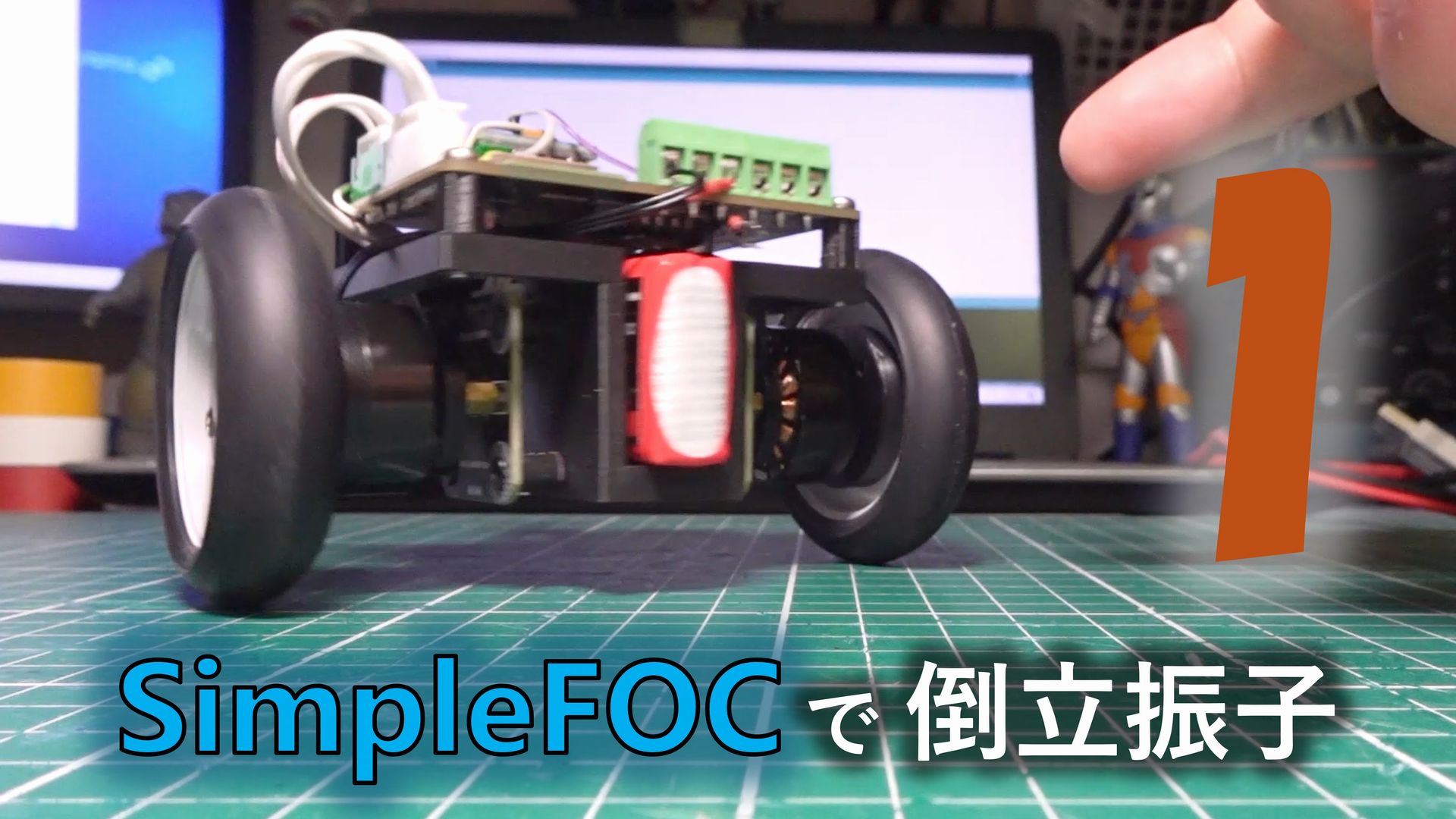
前回はSimpleFOCの応用を考え、姿勢制御モジュールの検討などを実施しました。 https://homemadegarbage.com/simplefoc03/ ここでは倒立振子の検討について報告いたします。 機体製作 これまで同様にMakerbase社製の...
電子工作 2024.9.18 お父ちゃん ![]()
SimpleFOC ライブラリの応用
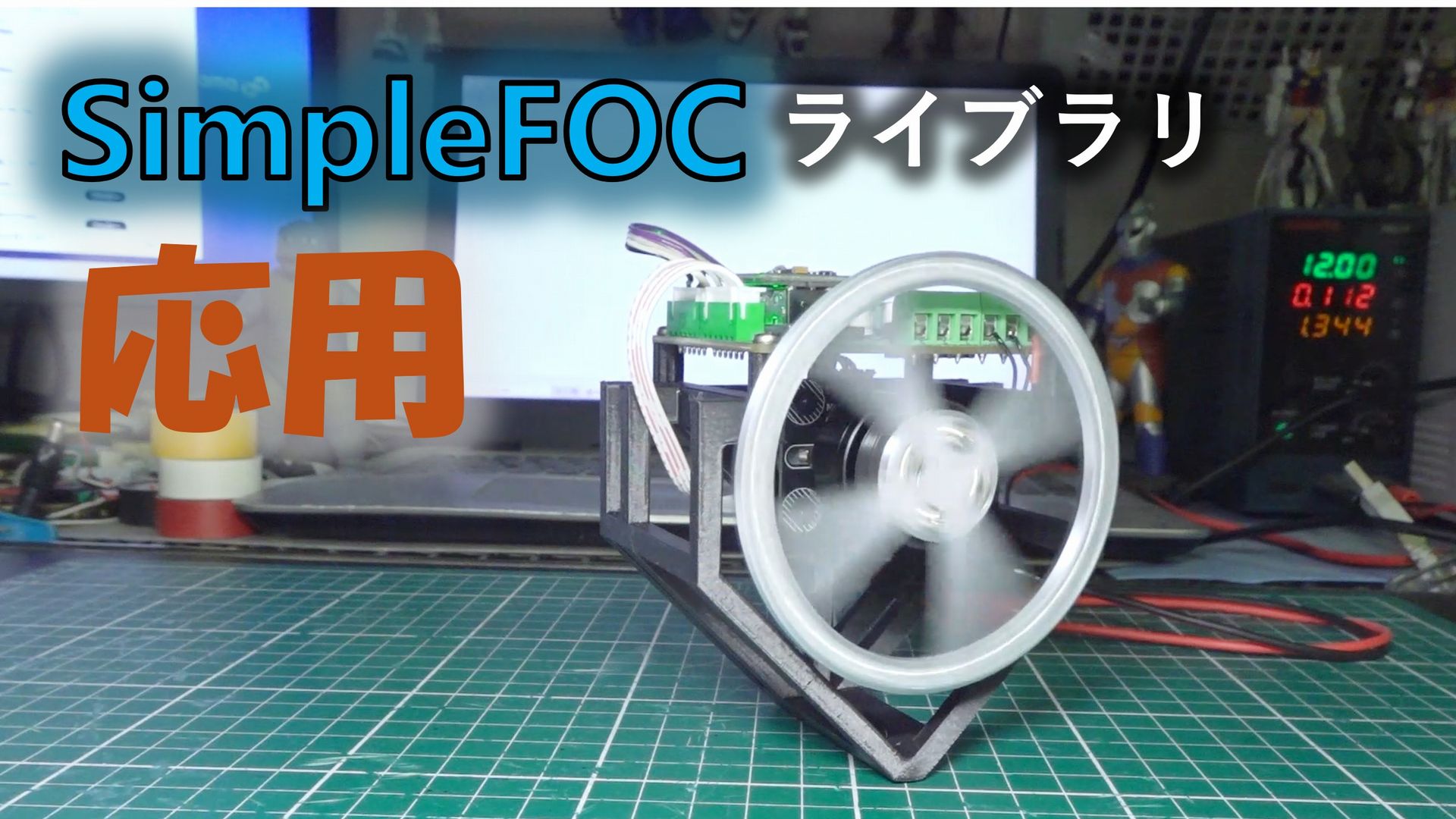
前回までにMakerbase社製 ESP32搭載ブラシレスモータコントローラを用いてSimpleFOCライブラリの基本的学習を済ませました。 https://homemadegarbage.com/simplefoc02 SimpleFOCへの理解が深まりましたので、いよいよ応用です。 応用し...
電子工作 2024.9.17 お父ちゃん ![]()

Raspberry Pi Pico W で二足歩行ロボット
以前に Raspberry Pi Pico W を Arduino IDEで開発できるようにして、姿勢制御モジュールを実現しました。 https://homemadegarbage.com/pipicow02 その後に姿勢制御モジュールを応用した二足歩行ロボットを製作しており、ラ...
Raspberry Pi 2023.10.2 お父ちゃん ![]()

DCモータ 倒立振子で屈伸
前回はDCモータ RE-280RA を用いて倒立振子を製作しました。 https://homemadegarbage.com/bala10// [amazonjs asin="B07F83J78X" locale="JP" title="モーター RE-280RA"] ここでは膝を設けて屈伸動...

シリアルサーボモータ SCS0009 で倒立振子 完結編
前回はサーボモータSCS0009を用いて屈伸動作する倒立振子の検討を実施しました。 https://homemadegarbage.com/bala07 ここでは前回でた課題の検討を進め サーボモータを用いた倒立振子の神髄に迫りたいと思います。 前...

シリアルサーボモータ SCS0009 で倒立振子 屈伸動作
前回はサーボモータSCS0009を用いて倒立振子を作製し、倒立動作を確認しました。 https://homemadegarbage.com/bala06/ ここではそもそも倒立振子を製作しようと思ったきっかけである屈伸運動の検討をいたします。 https://twitter.c...

シリアルサーボモータ SCS0009 で倒立振子製作
前回はサーボモータLX-224の連続回転モードを用いて倒立振子を製作しました。 https://homemadegarbage.com/bala05 LX-224ではちょっとトルクが大きすぎてオーバースペックのため、別のモータで再挑戦しました。 シリアルサーボモー...

Raspberry Pi Pico W を Arduino IDE で味見2 ー姿勢制御モジュール製作ー
前回は Raspberry Pi Pico W をArduino IDEで味見し、WiFi通信やI2C通信を楽しみました。 https://homemadegarbage.com/pipicow01 ここでは更に深掘りし姿勢制御モジュールも製作しましたので報告いたします。 [amazonjs ...
Raspberry Pi 2023.4.4 お父ちゃん ![]()
ネーデルガンダム大地に立つ!!
以前にリアクションホイールでバランスする二足歩行ロボットを製作しました。 https://homemadegarbage.com/onewalker01 その際にネーデルガンダムのようだという感想をチラホラいただきました。 立った pic.twitter.com/bVTnW...
電子工作 2022.4.15 お父ちゃん ![]()
Seeed XIAO BLE nRF52840 Sense で1軸 姿勢制御モジュール 製作
先日はSeeed XIAO BLE nRF52840 Sense の味見をいたしました。 https://homemadegarbage.com/xiao-sense01 [bc url="https://www.seeedstudio.com/Seeed-XIAO-BLE-Sense-nRF5...
電子工作 2022.1.20 お父ちゃん ![]()