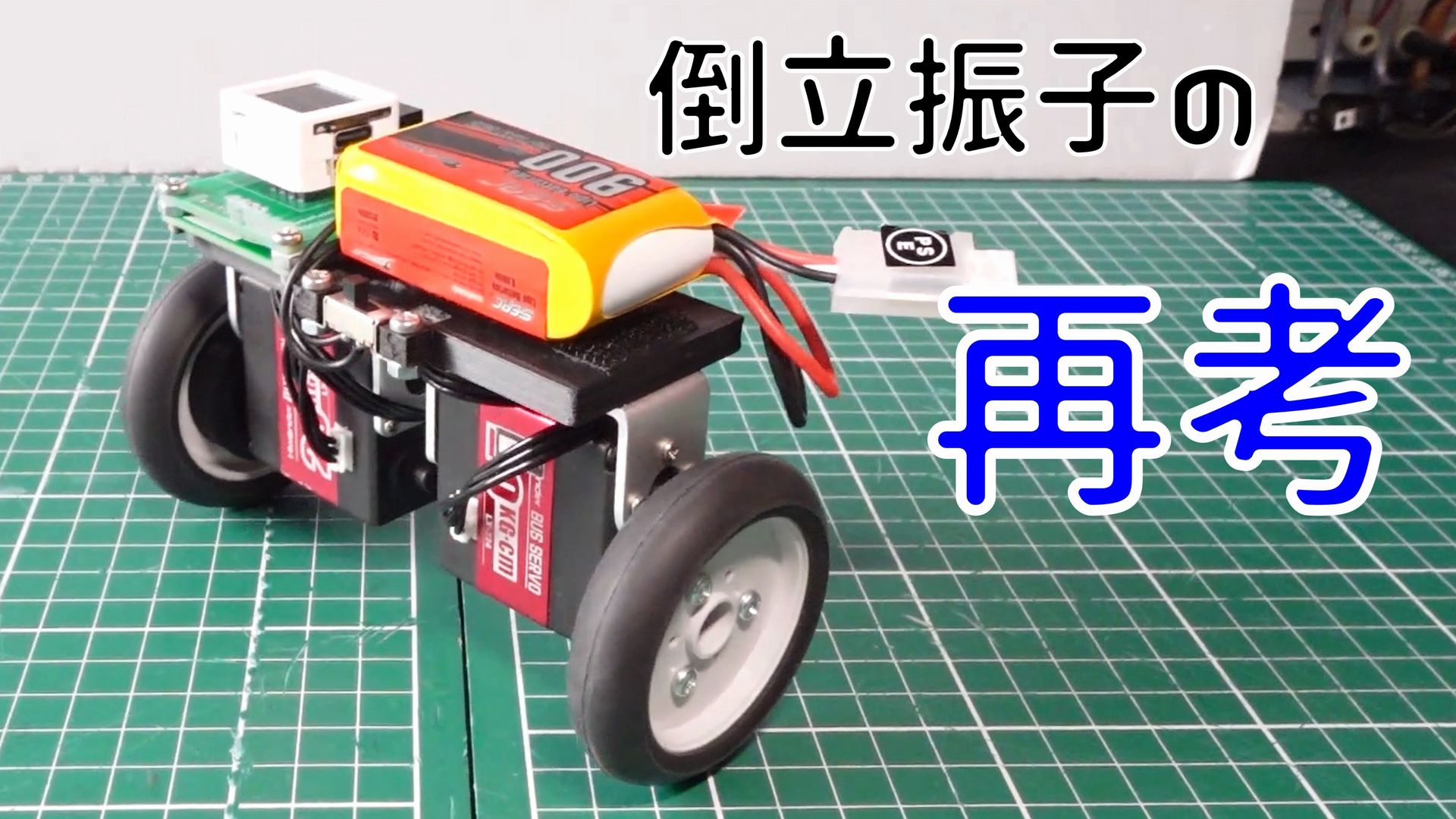
倒立振子の再考
本記事にはアフィリエイト広告が含まれます。
先日以下のツイートをみて “なんてユニークな動作なんだ!!”と思い。
久しぶりに倒立振子について考えてみたくなっちゃいました。
another demo pic.twitter.com/vN2phdIVem
— XGO (@luwu_dynamics) April 8, 2023
倒立振子は以前 M5StickCで製作しております。
制御可能となった。うれしい。#M5StickC #Blynk #倒立振子への道
BGM by Welcome脳https://t.co/Y33WdIluJx pic.twitter.com/Rb5D7EpUHp
— HomeMadeGarbage (@H0meMadeGarbage) July 15, 2019
これからだいぶ時間も経ち、リアクションホイールいじりでバランス制御にも慣れてきた現在の私が倒立振子と向き合ったとき いったい何が起きるのか興味がわいたのです。
目次
モータの検討
冒頭の動画ではサーボでタイヤを回しているようでした。
そういえば連続回転モードを有するサーボモータが手元にあったなと思い、さっそく動作を観てみました。
Motor Mode だって
いいモードですね pic.twitter.com/FWfMTCuNZ3— HomeMadeGarbage (@H0meMadeGarbage) April 10, 2023
使用したサーボはLX-224。高トルクのシリアルサーボで上の動画のように連続回転モータモードがあります。
回転が力強い!!
ATOMS3からもシリアル信号で制御してみた。
ATOMS3で味わう pic.twitter.com/QA4uUUmdAf
— HomeMadeGarbage (@H0meMadeGarbage) April 10, 2023
倒立振子の製作検討
サーボをモータモードで動かせるようになったので早速 倒立振子を作ってみました。
ATOMS3で制御し、内蔵のIMUセンサ (MPU6886)で姿勢を検知します。
MPU6886を楽しむ pic.twitter.com/U4iQfuM1i3
— HomeMadeGarbage (@H0meMadeGarbage) April 10, 2023
簡単な治具を3Dプリントして製作
サーボで倒立振子できた (Motor Mode)
制御はSHISEIGYOと同じ
機体の傾きと角速度、ホイール回転速度のフィードバック偏差の積分もしといたほうがいいべか?
とりあえずフランクに倒立振子作れる人間になれた pic.twitter.com/eNQA1ZYmd2
— HomeMadeGarbage (@H0meMadeGarbage) April 10, 2023
無事に倒立!
制御はSHISEIGYOシリーズと同様にIMUによる角度と角速度とホイール回転速度に係数をかけてサーボに印可するPWMデューティを決定しています。
SHISEIGYO製作を経て、一晩で倒立振子が作れる人間になりました。
学習は人を強くしますね。
更にバッテリを積んでタイヤも良いものを履かせてみました。
倒立振子
カッコよくした要調整。。 pic.twitter.com/GcFV8Porb2
— HomeMadeGarbage (@H0meMadeGarbage) April 11, 2023
機体高さやバッテリ搭載で重量が変わったため、フィードバック係数の調整が必要そうです。
ここでホイール回転速度は実速度のセンシングはしておらず直前の印可PWMデューティで代用しています。
あまり意味をなしていない気がするので制御方法を改める必要がありそうです。
PID制御
間接的なホイール回転速度のフィードバックはやめて、機体角度の偏差の積分をフィードバックするオーソドックスなPID制御にしました。
オーソドックスにPID制御にした。
安定してそれなりの外乱に耐えてくれる。
コントローラ:ATOMS3
サーボ:LX-224 pic.twitter.com/0R5ekaLfct— HomeMadeGarbage (@H0meMadeGarbage) April 11, 2023
安定した倒立動作が実現され、それなりの外乱にも耐えてくれています。
移動もできるようにしてみました。
高トルクのシリアルサーボLX-224を使用しているため、若干応答性が良くないですが移動も実現できました。
おわりに
ここではサーボモータの連続回転モードを用いて倒立振子を製作しました。
LX-224ではちょっとトルクが大きすぎてオーバースペックのため、程よいモータを探して再度製作に挑戦したいです。
また以下のように足も動かせるようにして動作を確かめてみたいです。
Introducing XGO team latest creation, a dual-wheeled legged robot! We are proud to share our passion for robotics with the world and hope to continue to push the boundaries of what's possible. #robotics #technology pic.twitter.com/LyAt740GRG
— XGO (@luwu_dynamics) April 10, 2023
それでは また
次の記事

関連記事
 シリアルサーボモータ SCS0009 で倒立振子製作
シリアルサーボモータ SCS0009 で倒立振子製作
 1軸 姿勢制御モジュール の倒立に向けた準備 ーリアクションホイールへの道6ー
1軸 姿勢制御モジュール の倒立に向けた準備 ーリアクションホイールへの道6ー
 1軸 姿勢制御モジュール がやっと立った ーリアクションホイールへの道7ー
1軸 姿勢制御モジュール がやっと立った ーリアクションホイールへの道7ー
 1軸 姿勢制御モジュール SHISEIGYO-1 完成 ーリアクションホイールへの道14ー
1軸 姿勢制御モジュール SHISEIGYO-1 完成 ーリアクションホイールへの道14ー
 姿勢制御モジュール SHISEIGYO-1R 爆誕 ーリアクションホイールへの道15ー
姿勢制御モジュール SHISEIGYO-1R 爆誕 ーリアクションホイールへの道15ー
 3軸 姿勢制御モジュール SHISEIGYO-3 物理ブレーキ検討2 ーリアクションホイールへの道21ー
3軸 姿勢制御モジュール SHISEIGYO-3 物理ブレーキ検討2 ーリアクションホイールへの道21ー
 2軸 姿勢制御モジュール SHISEIGYO-CORE2 完成 ーリアクションホイールへの道31ー
2軸 姿勢制御モジュール SHISEIGYO-CORE2 完成 ーリアクションホイールへの道31ー
 SHISEIGYO-2 Go ホイール検討 球状歯車を味見 ーリアクションホイールへの道40ー
SHISEIGYO-2 Go ホイール検討 球状歯車を味見 ーリアクションホイールへの道40ー