
Raspberry Pi Pico W で二足歩行ロボット
本記事にはアフィリエイト広告が含まれます。
以前に Raspberry Pi Pico W を Arduino IDEで開発できるようにして、姿勢制御モジュールを実現しました。
その後に姿勢制御モジュールを応用した二足歩行ロボットを製作しており、ラズパイコンテスト用にとっておいたのですが今年もコンテスト開催はないようなのでブログにしたためて成仏させたいと思います。
足用サーボモータ動作確認
二足歩行ロボットの足はサーボモータをリンク機構で組みます。
片足2個ずつの計4個のシリアルサーボ HiWonder LX-224を使用します。
Raspberry Pi Pico W からUARTでシリアルサーボ制御動作を確認しました。
Raspberry Pi Pico W でサーボを楽しむ pic.twitter.com/p8T0HRt9tX
— HomeMadeGarbage (@H0meMadeGarbage) April 4, 2023

機体製作
二足歩行ロボットを組みます。
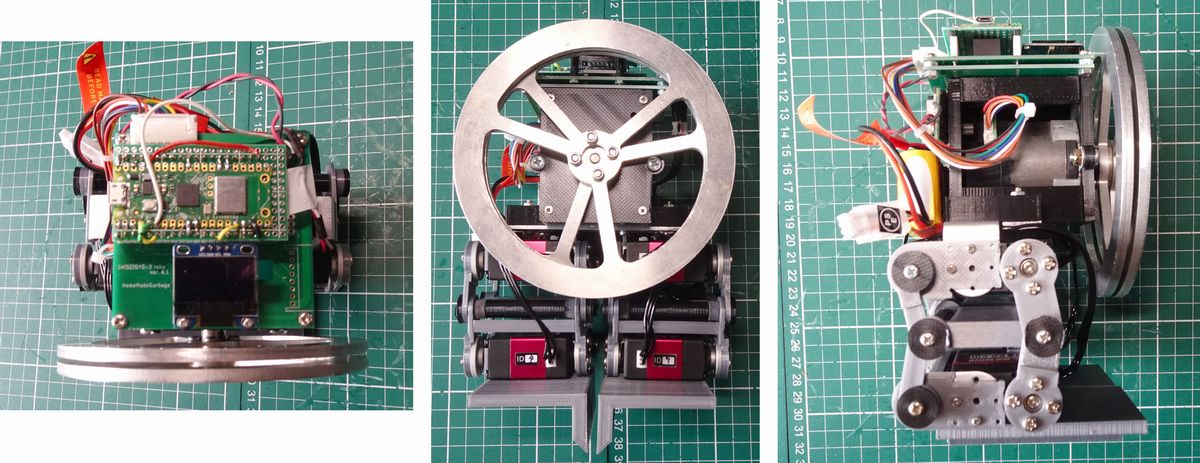
前回の姿勢制御モジュールと同様のシステムでリアクションホイールを制御して、同時に足用のシリアルサーボも制御します。
電源には7.4VのLiPoバッテリを使用
7.4VをDCDCモジュール S18V20F24 で24Vに昇圧してリアクションホイール用ブラシレスモータに供給しています。

動作
無事にRaspberry Pi Pico Wによる二足歩行ロボットが完成しました。
“SHISEIGYO-1 Walker Pico W”と命名します。
Arduino IDEでの開発も気軽でこれまでの資産を活用できるのでRaspberry Pi Pico Wの更なる活用も期待できそうです。
OLEDディスプレイには機体の傾き角度を数値とインジケータで表示しています。
このロボットにダンボールをかぶせてタイムくんの製作も楽しみました。








