1軸 姿勢制御モジュール 物理ブレーキの検証 ーリアクションホイールへの道12ー
本記事にはアフィリエイト広告が含まれます。
さて、リアクションホイールへの道10で物理ブレーキなしでの起き上がり倒立の手法を検証し、
リアクションホイールへの道11で制御パラメータを理論や物理で説明のつくものだけに整理して安定倒立を達成いたしました。
以上を組み合わせてSHISEIGYO-1の完成を目指したいところですが、
私の悪い癖。寄り道をさせていただきます。
目次
The Cubli
何気なくJAXAの姿勢制御モジュールのルーツであろう チューリッヒ工科大の
The Cubliの論文を眺めてみました。
なんとThe Cubliの物理ブレーキはサーボで実装と記載があるではありませんか!
どうしよ。。。
試してみたい。。。
ためしてーー!!
サーボによる物理ブレーキの実験
やってみた。
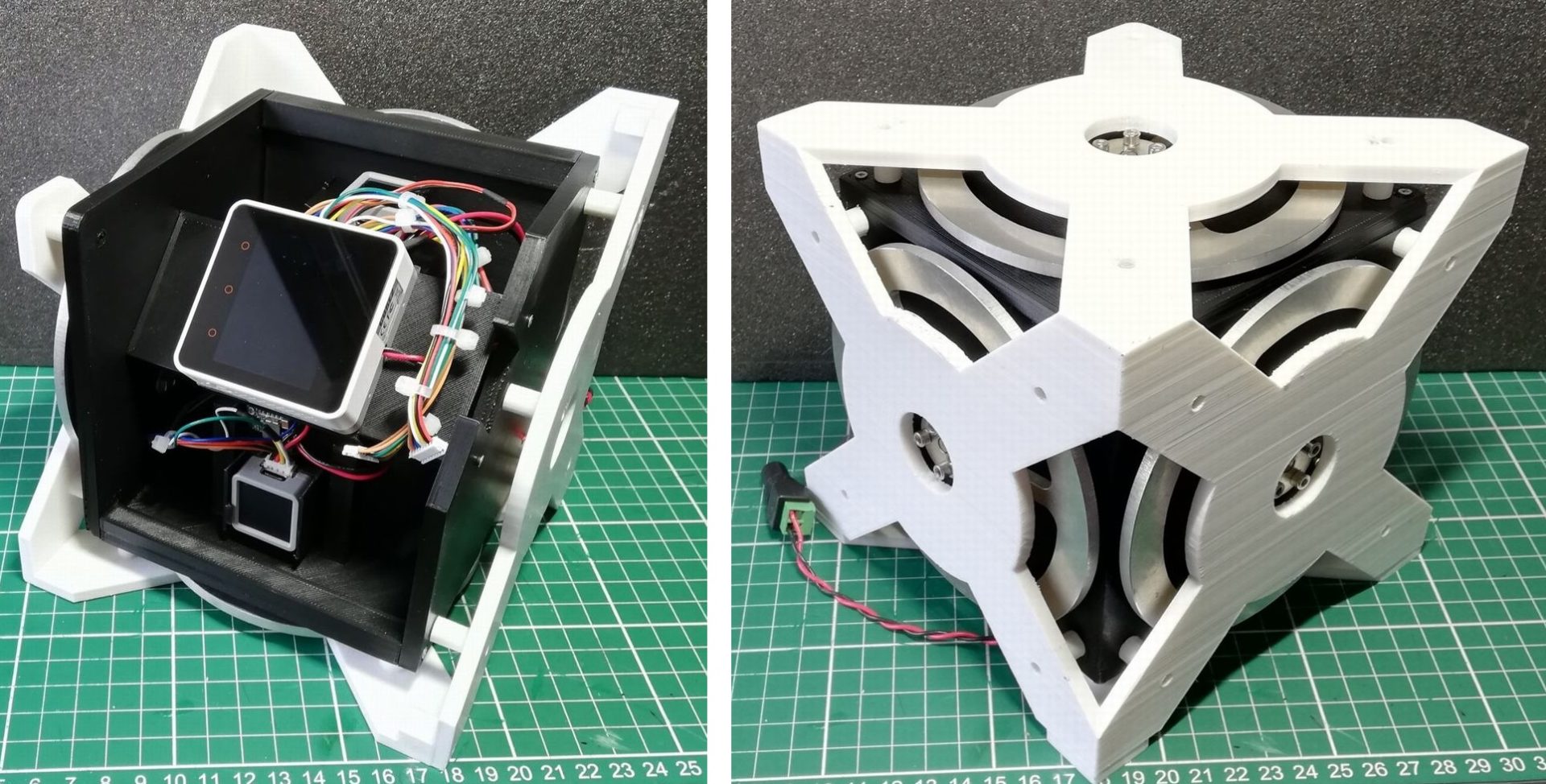
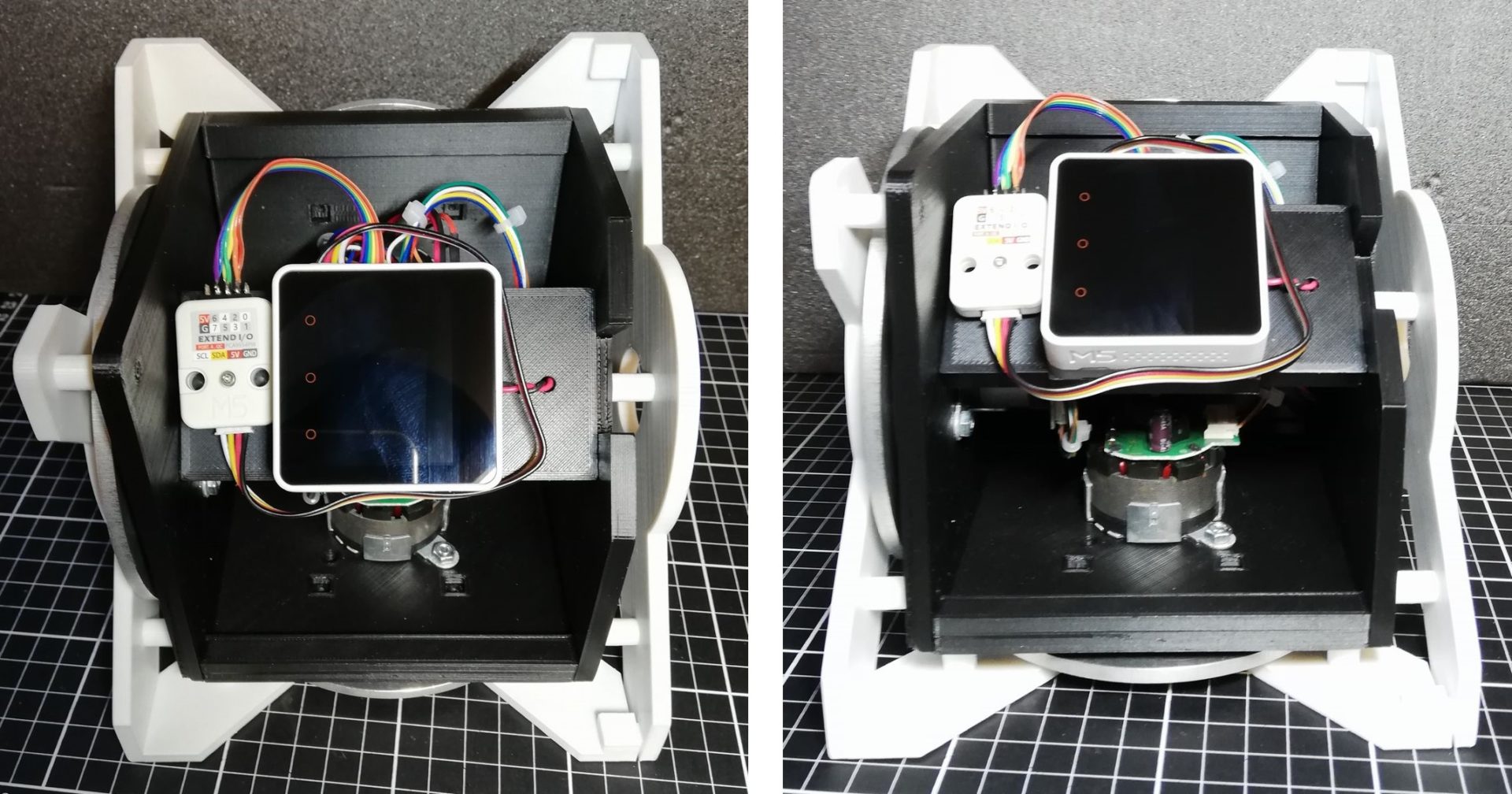
早速、サーボ搭載できるように筐体を3Dプリンタでこしらえました。

組み立てて動作チェックOK!
さすがに雑かな? pic.twitter.com/w3SU7XihsK
— HomeMadeGarbage (@H0meMadeGarbage) August 18, 2020
構成は以下の通り
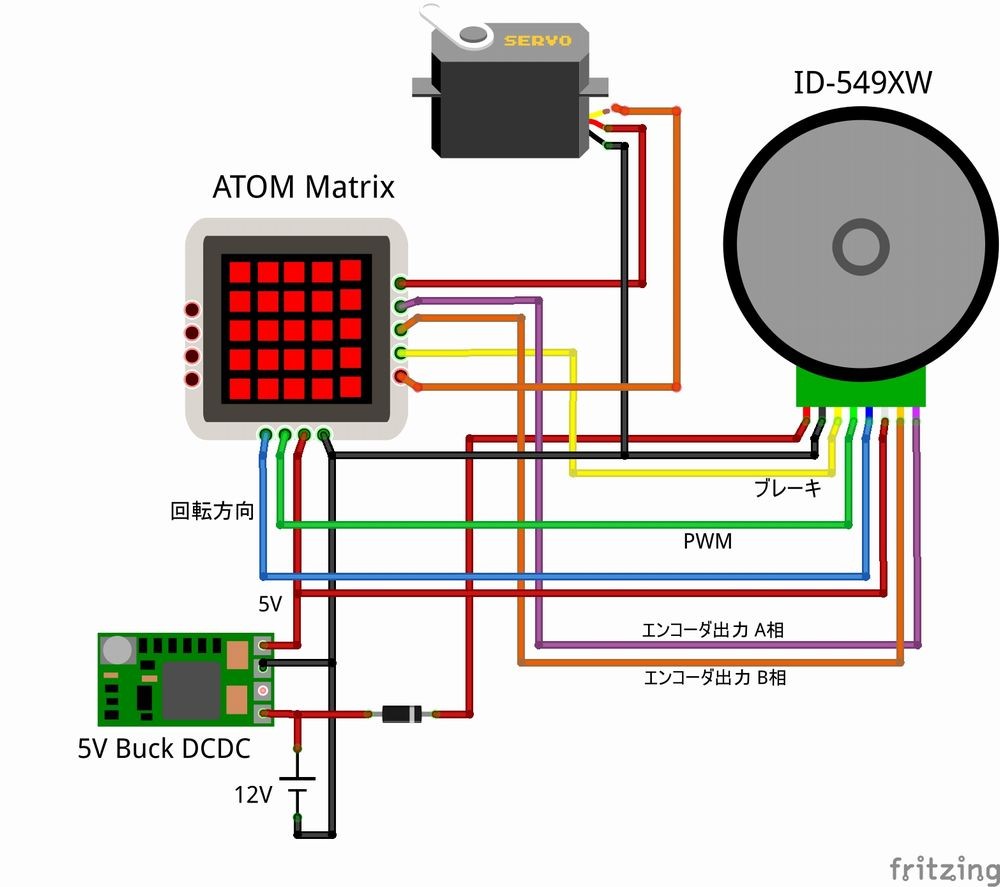
サーボは以下を使用しました。
ちなみにモータのPWM信号の入力にはESP32のledc関数を使用しております。
今回サーボをESP32servoライブラリで動作させようとしたところ
ledc関数と共存ができないためか上手く動きませんでした。
そこで、ここでは以下を参考にサーボもledc関数で動かしています。

実験開始
クソッ。。。 pic.twitter.com/Q72q6LML9a
— HomeMadeGarbage (@H0meMadeGarbage) August 18, 2020
全然止まらない。。。
再実験
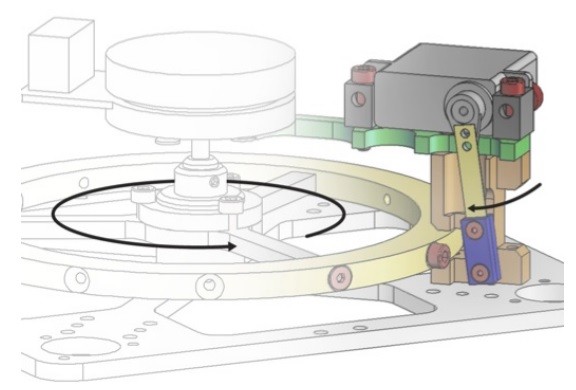
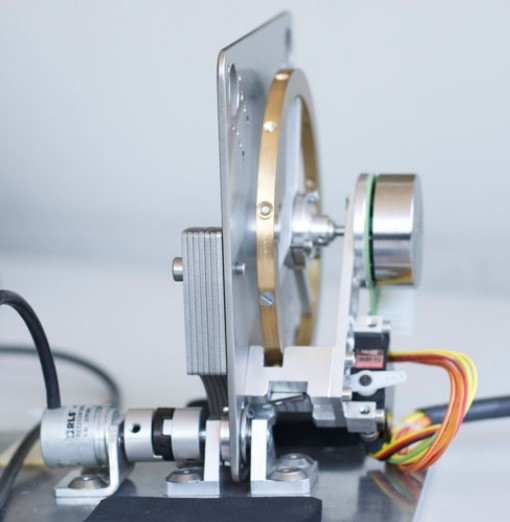
再度よくよくThe Cubliの物理ブレーキの図を見ると
ホイールに杭が打ってあって、そこにサーボのアーム挟み込んで止めているようです。
なるほど!めっちゃ物理のブレーキだったんですね!
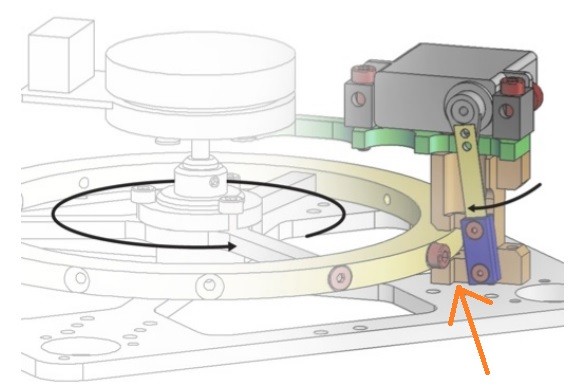
早速加工じゃ!

ホイールにネジ入れてサーボのアームを金具で強化しました。

動作
ちょっと怖いのでモータの電圧を24Vから8Vに低下して動作確認。
あーこっち側に浮くのね。
反時計回りにホイールを回してブレーキかけると、反作用で時計回りにモジュールが浮くのですね。
モジュールの向きを変えて再トライ。
浮いたけど力が弱いみたい.

ではモータの電圧を12Vにあげて再トライ。
クソが pic.twitter.com/AY8kLuyO2y
— HomeMadeGarbage (@H0meMadeGarbage) August 19, 2020
物理強度が足りない。。
完全に心もポキンと折られました。。。
ぴえん 😥
The Cubliのように サポート含めてしっかり作りこまないとだめですね。。
おわりに
ちょっと物理ブレーキは一旦諦めます。
以下所感
- 硬い加工物が作れるようになりたい
- 物理ブレーキなしで安定的に起き上がり倒立を確立したほうがセンセーショナルだ
(負け惜しみ)
というわけで大変勉強になりましたとさ
次の記事
関連記事
 1軸 姿勢制御モジュール 起き上がり倒立の確立 ーリアクションホイールへの道13ー
1軸 姿勢制御モジュール 起き上がり倒立の確立 ーリアクションホイールへの道13ー
 3軸 姿勢制御モジュール SHISEIGYO-3 への挑戦そして挫折 ーリアクションホイールへの道16ー
3軸 姿勢制御モジュール SHISEIGYO-3 への挑戦そして挫折 ーリアクションホイールへの道16ー
 3軸 姿勢制御モジュール SHISEIGYO-3 点倒立の実現 ーリアクションホイールへの道17ー
3軸 姿勢制御モジュール SHISEIGYO-3 点倒立の実現 ーリアクションホイールへの道17ー
 3軸 姿勢制御モジュール SHISEIGYO-3 筐体検討 ーリアクションホイールへの道18ー
3軸 姿勢制御モジュール SHISEIGYO-3 筐体検討 ーリアクションホイールへの道18ー
 3軸 姿勢制御モジュール SHISEIGYO-3 マイコン削減 ーリアクションホイールへの道19ー
3軸 姿勢制御モジュール SHISEIGYO-3 マイコン削減 ーリアクションホイールへの道19ー
 3軸 姿勢制御モジュール SHISEIGYO-3 物理ブレーキ検討 ーリアクションホイールへの道20ー
3軸 姿勢制御モジュール SHISEIGYO-3 物理ブレーキ検討 ーリアクションホイールへの道20ー
 3軸 姿勢制御モジュール SHISEIGYO-3 安定点倒立メソッドの確立 ーリアクションホイールへの道23ー
3軸 姿勢制御モジュール SHISEIGYO-3 安定点倒立メソッドの確立 ーリアクションホイールへの道23ー
 3軸 姿勢制御モジュール SHISEIGYO-3 起き上がり点倒立達成 ーリアクションホイールへの道24ー
3軸 姿勢制御モジュール SHISEIGYO-3 起き上がり点倒立達成 ーリアクションホイールへの道24ー