ブラシレスモータで2足歩行ロボット11 ー 動作検討3 ー
本記事にはアフィリエイト広告が含まれます。
前回は足底に低反発スポンジを採用することでスムーズな足運動動作を実現することができました。
歩行もしっかり足を上げてスムーズにできるようになりました。

目次
足補強1
低反発スポンジを採用してみて足の強度に不満が生じたので補強パーツを追加しました。

この時点で片足だけで 31パーツ、ネジ20本。。。
絶対に不健全だし何か間違ってる気がする 😥
パーツ追加による干渉もなく強く動いています。
PS4コントローラ pic.twitter.com/lzeWV7rgbA
— HomeMadeGarbage (@H0meMadeGarbage) March 30, 2025
足底素材検討1
前回 10mm厚のシールフレックスモールド SFM006という低反発スポンジ資材を足底に採用しました。
まじかー素材ひとつで性能激変するんだけど
やばいことに手をでしてしまったかもしらん pic.twitter.com/k5zLFEHtIS— HomeMadeGarbage (@H0meMadeGarbage) March 27, 2025
いいクッションになって左右の動作移行がスムーズになりましたが、上のようにかなりブヨブヨなので重心が偏ると機体そのものが傾いてしまいます。。
もう少し固めでなにか良い素材がないか色々試してみました。

ダイソーのインソール
100均の衝撃吸収インソールを試してみました。

結論から申し上げますと滑ってダメでした。表面がちょっとツルツルなの

項反発のインソールも購入してありましたが、同様に表面がツルツルで滑るのが明らかだったので試しませんでした。
5mm厚ゴムスポンジ
東急ハンズに売っていた5mm厚のゴムスポンジを試してみました。
5mm厚ゴムスポンジでもイケそうだな
カスタム調整は必要だろうけど
ちょっとカマボコ型にしてみましょう pic.twitter.com/Az77Uecpq5— HomeMadeGarbage (@H0meMadeGarbage) March 30, 2025
若干衝撃強めですが、いい感じに動けています。
スポンジ自体の強度もあるので機体が傾くこともありませんでした。
10mm厚ゴムスポンジ
ちょっと5mmスポンジだと衝撃が吸収できていない様子だったので、同様にハンズで購入した10mm厚のものを試しました。
足裏の素材の呪縛
現状はブレード幅戻して(28㎜) 10mm厚の黒セルスポンジ履かせてる
なんか動いてるけど最適解なのかどうかもうわからない pic.twitter.com/Yx6HnjEnsZ— HomeMadeGarbage (@H0meMadeGarbage) March 31, 2025
衝撃もうまく吸収できており、厚さはありますが素材強度も十分あるので凹んで機体が傾くようなこともありませんでした。
ひとまず 10mm厚ゴムスポンジ を採用!
足上げ動作精査
横移動時に足が上がりすぎて転ぶことがあったので、足上げ動作に変更を加えました。
片足で地面を蹴り上げてから下げるトリガを 従来の
・機体の角速度の符号切り換わり
に以下をORで追加
・蹴上げ前の姿勢角との偏差が上限達成 (以下の動画では8°設定)
横移動
足で地面を蹴り上げてから下げるトリガを
・機体の角速度の符号切り換わり
に加えて以下もORで追加
・蹴上げ前の姿勢角との偏差が上限達成 (動画では8°設定)これにより過剰な足上げが抑制された。
他の前進後進動作にもこの偏差上限マスクは展開したい pic.twitter.com/hoLw25ElDQ— HomeMadeGarbage (@H0meMadeGarbage) March 31, 2025
これにより過剰な足上げが抑制され横移動時も安定して実行できるようになりました。
前進後進などすべての足動作にこの変更を展開しました。
前後進にも足上げ抑制マスク展開 いい感じ
あと動作開始時とループ動作時の足位置ケアも施した
凄く細かくてノーケアでもよかったのだけど
お天道様はみてる強迫観念 pic.twitter.com/XqqklTuF4L— HomeMadeGarbage (@H0meMadeGarbage) March 31, 2025
歩行動作検討1
旋回動作も実施
旋回動作
このロボットに関してはヨー角モータ追加なしでいいかな
ブラシレスモータによるロボの習作としては十分しゃぶりつくせた自由度の高い足の検討は別段でいつかやる pic.twitter.com/TQGCt5mdKg
— HomeMadeGarbage (@H0meMadeGarbage) April 2, 2025
片足3軸のヨー角がない構成なので、片足を軸とした大回りの旋回となりますが、一応方向転換もできるようになりました。
かなり縦横無尽に移動できるようになりましたよ
外装つけて憧れのあのドロイドのように。。
まぁ。。。貧乏くせーけど HomeMadeGarbageらしいわな。
足底素材検討2
5mm厚のシールフレックスモールド を入手したので試してみました。
新しい靴 pic.twitter.com/CqoF120TBE
— HomeMadeGarbage (@H0meMadeGarbage) April 4, 2025
かなり具合いが良かった!
5mm厚 低反発クッションの靴いい感じ pic.twitter.com/pomfu2Ol2y
— HomeMadeGarbage (@H0meMadeGarbage) April 4, 2025
5mmと薄いので素材自体の変形量も少なく、衝撃吸収も十分です。
こちらを本採用!!
足補強2
またまた気になったので足補強。。。
これで最後の最後だから!

片足だけで35パーツとなりました。。。
プロジェクトの運用という点ではもうとっくに失敗だね。。
でも動作はバッチリです。
bipedal robot using brushless motors
PS Controller pic.twitter.com/hivHI0sh6T— HomeMadeGarbage (@H0meMadeGarbage) April 6, 2025
歩行動作検討2
もろもろ微調整して動作シーケンス完成しました。
HomeMadeGarbageのロボットしては最大級だから、家の中ウロウロ動かれるのはちょっと迷惑。。
おわりに
ここでは足底素材の検討、補強、動作検討を繰り返してロボットのブラッシュアップをはかりました。
どすこいわっしょいピーポーピーポー
西山ダディダディ pic.twitter.com/69dNqyjmQu
— HomeMadeGarbage (@H0meMadeGarbage) April 7, 2025
当初はヨー角にサーボ追加して4軸脚にしようかなとも思ったのですが、本ロボットに関してはこれで完成で良いかなと思っています。

片足3自由度のロボットとなりました。
ブラシレスモータによる卓上ロボットは非常に珍しいのではないでしょうか。
将来的には本家DBXドロイドのように5軸脚のロボットも検討してみたいです。
金かかりそうだなぁ。。。
a paper worth studying😉https://t.co/oIugHiOt8B pic.twitter.com/lTcrjDMO7X
— High Torque Robotics (@HTrobotics) July 31, 2024
3軸だとこんなもんよ。でも結構イケてるでしょ
ジャンプ
ご覧ください。
足を伸ばしてから縮めるタイミングを手動で調整したらこんなにも高度のあるジャンプが実現されました。これは強化学習よりも真心をこめた手動チューニングの方が優れていることを如実に証明しています。 https://t.co/E2kVNccnDd pic.twitter.com/HaVIaIjnVj
— HomeMadeGarbage (@H0meMadeGarbage) April 8, 2025
APPENDIX
機体構成
ロボットの構成をザックリまとめておきます。

CANのデータ構成は以下のとおり
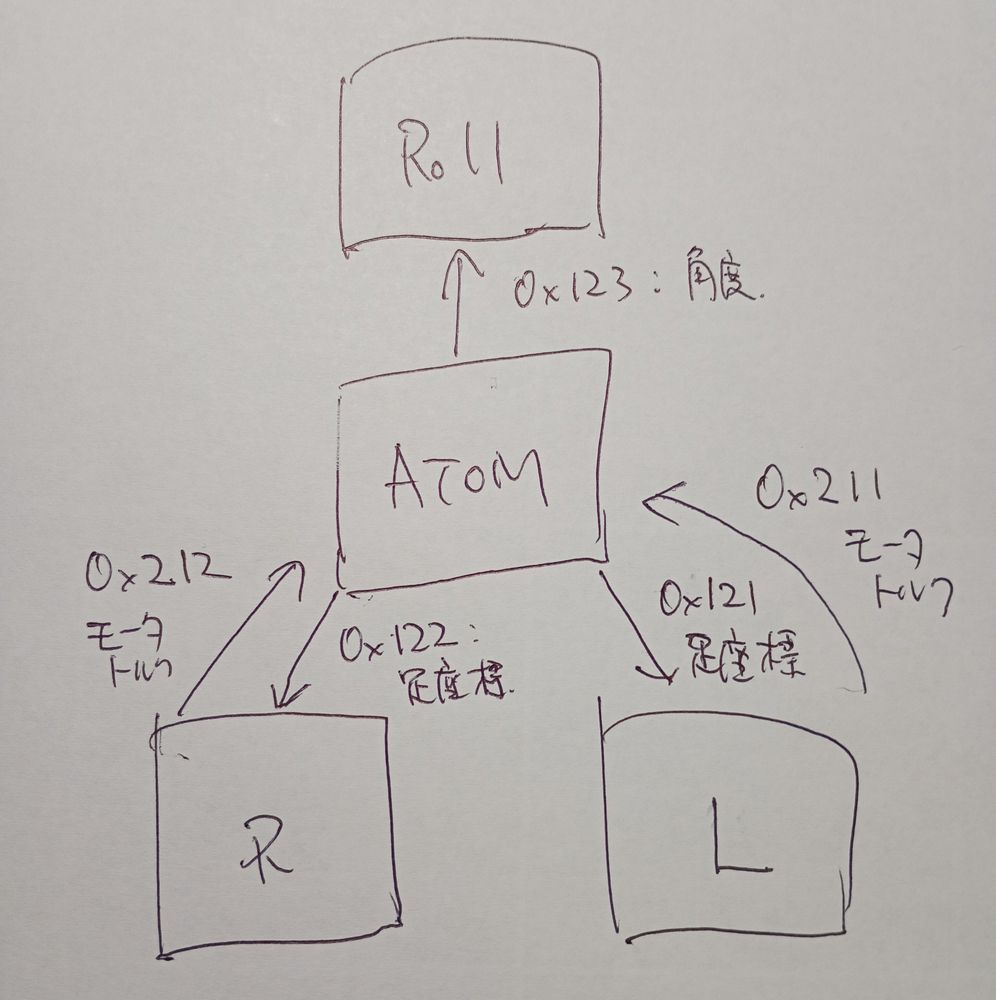
- ATOM Matrix


- モータドライバ MKS ESP32 FOC V2.0

- ブラシレスモータ 5010 360KV

- 磁気エンコーダ
-
- CAN-UART変換モジュール VP230

動作シーケンス概要
足踏みを例に足動作のシーケンスをご紹介
- 片足で地面を蹴ってから足を上げる
足の蹴る量と速さ、そして上げる高さと速さはパラメータ値として指定 - 蹴り上げてから足を下げるタイミングは以下のいづれかをトリガとする
■傾いた機体が戻るタイミングをIMU角速度の符号反転で検知
■蹴り上げ前の機体角度と蹴り上げ後の角度差が規定パラメータ値を超えたら - 下げた足の接地をモータのトルクで検知して反対の足の蹴り上げ動作を開始
■トルクは左右のふくらはぎモータの電流値の差分の変化量から検出
■トルクが正常に検知できなかったら1sec後に他方動作開始 - ロール軸は常に平行を保つように自律動作
IMUセンサを元にPD制御
以上を繰り返して足踏み動作を実行しています。
かなり自動化できており大変満足しています。
前後進や横移動は足踏みに足の前後やロール軸角度をつけて実行しています。
BDXドロイド TDKに登場!!
なんと2025年4月7日より東京ディズニーランドに本プロジェクトが憧れそして恋焦がれたドロイドが登場しました。
めちゃくちゃかわいい。。。見に行ける方々が羨ましいわ
この発表でこのドロイドの日本での正式名称が “BDXドロイド” であることが判明しました。
\東京ディズニーランドに初登場/
今日から6月30日まで、スター・ツアーズ社の個性豊かな #BDXドロイド たちがトゥモローランドを探索する様子をお楽しみいただけます。
ぜひ会いに来てくださいね✨ pic.twitter.com/kIAVAqH56o— 東京ディズニーリゾートPR【公式】 (@TDR_PR) April 7, 2025