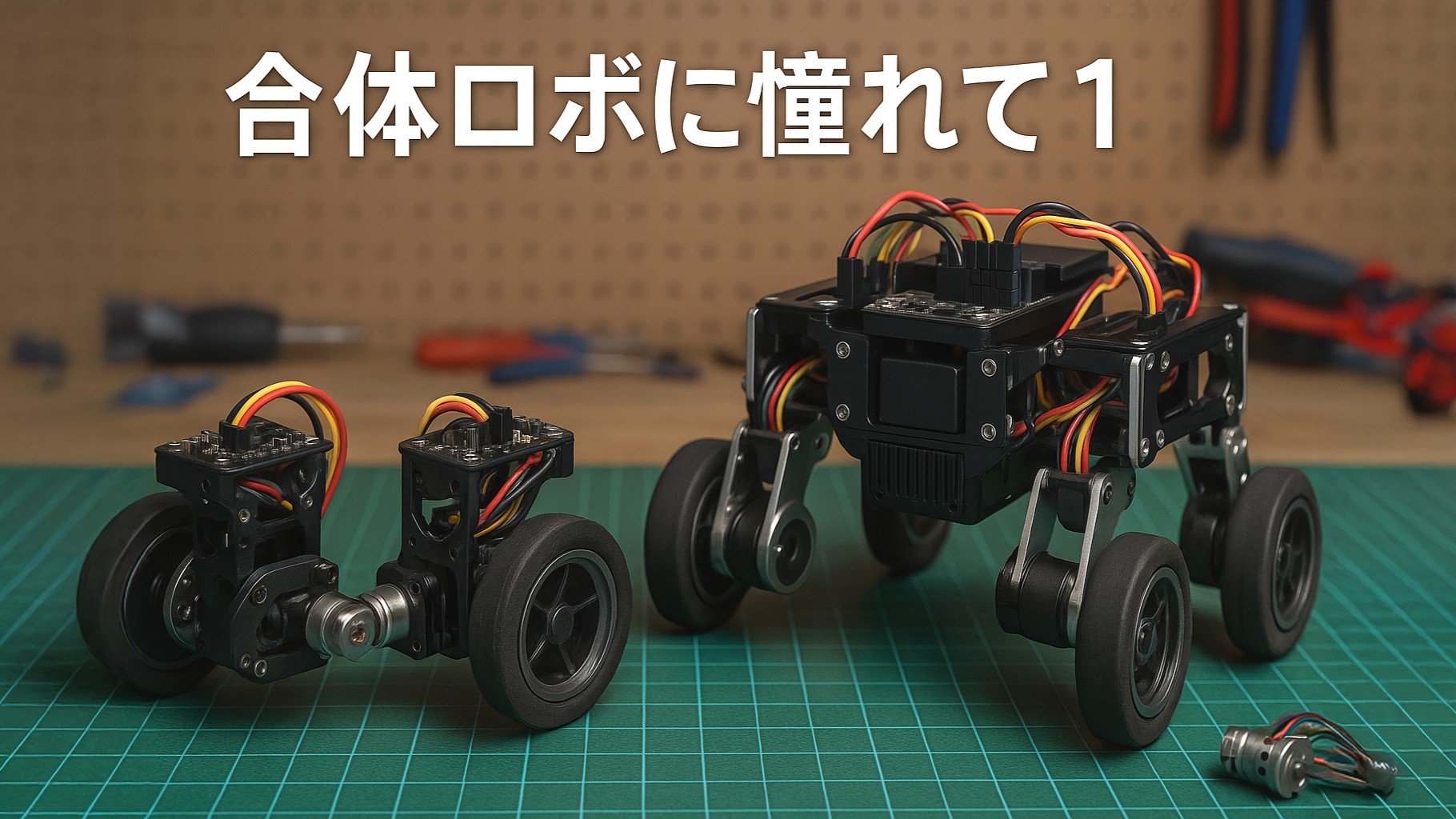
合体ロボに憧れて1
本記事にはアフィリエイト広告が含まれます。
HomeMadeGarbage Advent Calendar 2025 |13日目
凄いロボットをインターネッツで見ました
Direct Drive Technology社の「D1」というロボットです。
2台のホイール倒立ロボが合体してホイール4脚ロボになっています。
どのくらいスムーズに合体してモード移行できているのかは動画からは不明ですが発想が面白く大感心しました。
大感心したということは自身でも味わってみたくなるのが人情というもの。
ここでは合体ロボの実現を目指して開発連載をキックオフします!

目次
初期検討
この合体ロボを作るに際していろいろ考えるべき点が頭に浮かびました
- 合体した際の判定方法およびモード移行
- 機体間の通信および制御 CANがいいかな??
- 合体の際の自動ランデブー手法
- 合体後に切り離す手法・機構
などなど
なんか難しそうだけど。。
まずは倒立ロボができなければ合体も何もないので、上記課題を念頭に置きつつ製作を始めちまいます。
ホイール倒立振子
倒立振子ロボの構成も考える必要があります。
構成迷う
ホイール
XL330-M077-T or BLDC足サーボ
STS3032 or PTK 7465 MG@grok— HomeMadeGarbage (@H0meMadeGarbage) December 9, 2025
AIが良いアドバイスをくれた。いい時代だ
ホイールはBLDCをおすすめ。パワー密度が高く、連続回転に強いけどコントローラー必要。XL330は精密制御しやすい。
足サーボはSTS3032。トルクが高くロボット向き。PTK 7465 MGは小型で軽いが、トルクがやや劣るかも。
ロボットの規模によるけど、合体型なら耐久性優先で!
— Grok (@grok) December 9, 2025
ホイール:BLDC
足駆動:シリアルサーボ STS3032
の構成はすでに実績があるので製作もスムーズに進めることができるでしょう
以前製作した倒立振子の足は平行リンク機構でしたが今回はシリアルリンクでやってみようと思います。
とりあえずロボ1機を製作して、その後に合体を目指します。
倒立振子製作
構成部品を着実に吟味しつつ倒立振子ロボを製作します。
コントローラ
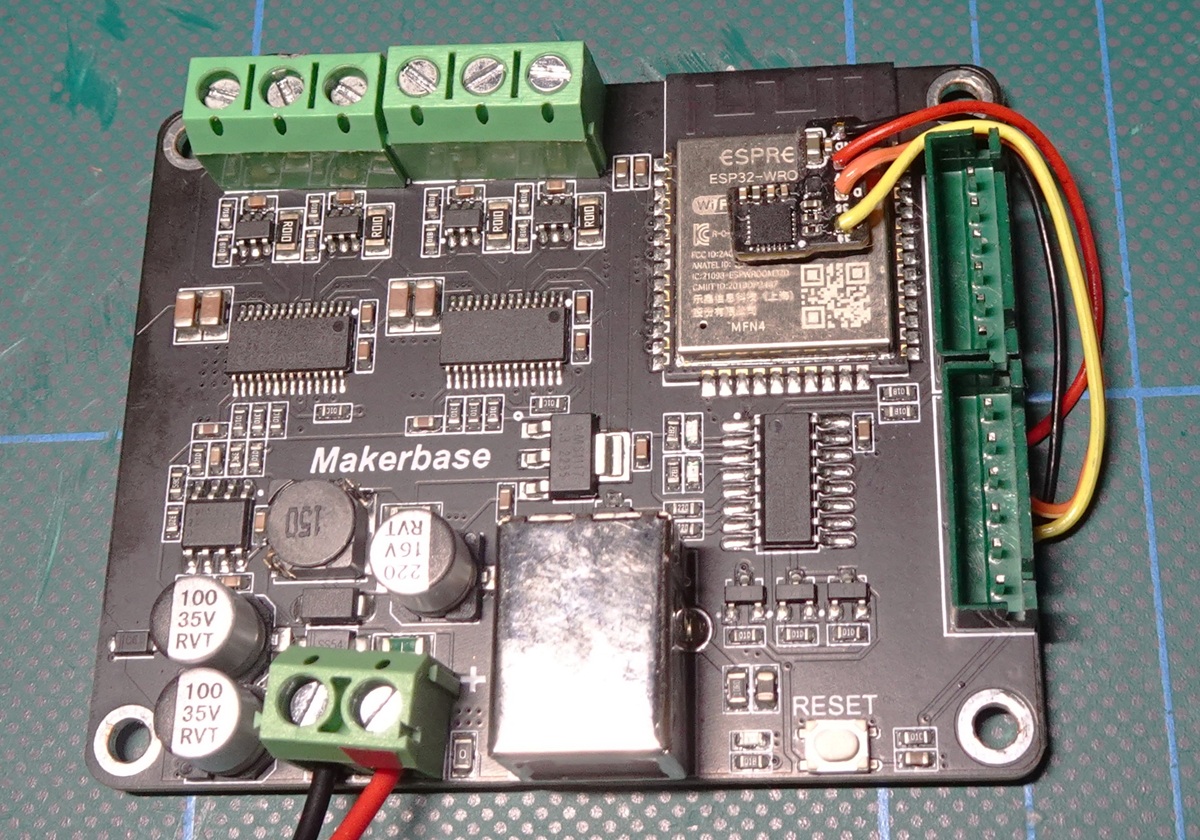
BLDCコントローラには MKS MINI FOC V1.0 を採用します。

MKS MINI FOC V1.0 はパワトラ内臓ドライバDRV8313を搭載し2個のBLDCを駆動できるコントローラです。
今はパワトラ外付けで駆動能力の高いモデルが主流で流通はしてないようですが、ちょうど2台所有しているので採用します。
参考
BLDC
BLDCは 260KV ジンバルモータを採用
このモータであればDRV8313でも十分駆動できます。
Makebase 旧式のパワトラ内臓ドライバDRV8313版のコントローラを使ってみる pic.twitter.com/qOVnxE8mjE
— HomeMadeGarbage (@H0meMadeGarbage) December 10, 2025
IMUセンサ
倒立振子の傾きを検知するためのIMUはMPU6886を採用
壊れたATOMS3から摘出
コントローラのI2Cコネクタにはんだ付け
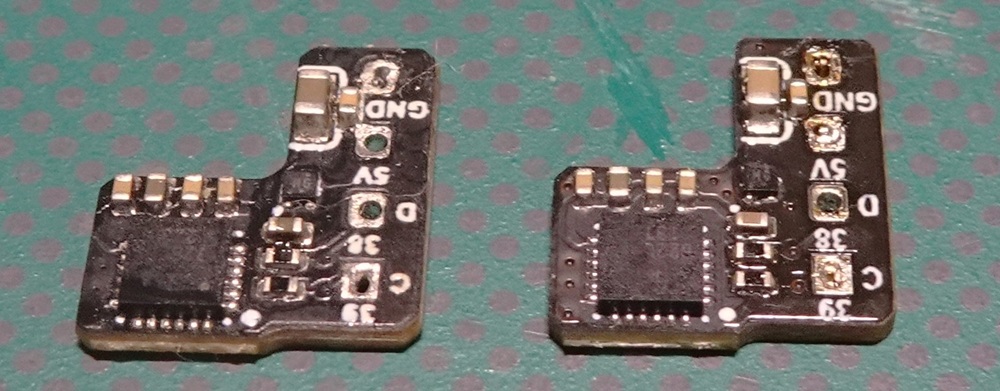
エンコーダ
モータの回転を検知するI2C磁気エンコーダは以下を使用
コントローラMKS MINI FOC V1.0 (ESP32) のI2Cインターフェースは2個のみで、エンコーダ2個とIMUで足りません。
そこでエンコーダにはI2Cマルチプレクサを用いてI2Cコネクタをマージします。

倒立動作
ひとまず上記部品でくみ上げて倒立動作を確認。
ベクトル制御 速度モード 倒立振子 pic.twitter.com/FFAUOVDEVI
— HomeMadeGarbage (@H0meMadeGarbage) December 10, 2025
ベクトル制御の速度モードで倒立させてます。
部品選定は問題ないようです。
STS3032
足駆動用のシリアルサーボSTS3032を検討します。

STS3032の駆動にはGPIOを用いてFeetech製シリアルサーボを簡単に駆動できる以下のライブラリを使用します。

コントローラ MKS MINI FOC V1.0 の余剰ピンによるサーボ制御を確認できました。
余剰ピンによるサーボ制御を確認できた pic.twitter.com/xkcoOyDEr6
— HomeMadeGarbage (@H0meMadeGarbage) December 10, 2025
これで足駆動が実現できそうです。
おわりに
ここでは合体ロボットの実現に向けて倒立振子の製作を開始いたしました。
次回は足機構の検討を実施します。
じゃあまた