バケチャンロボを実現したい我々4 ーボディ検討ー
本記事にはアフィリエイト広告が含まれます。
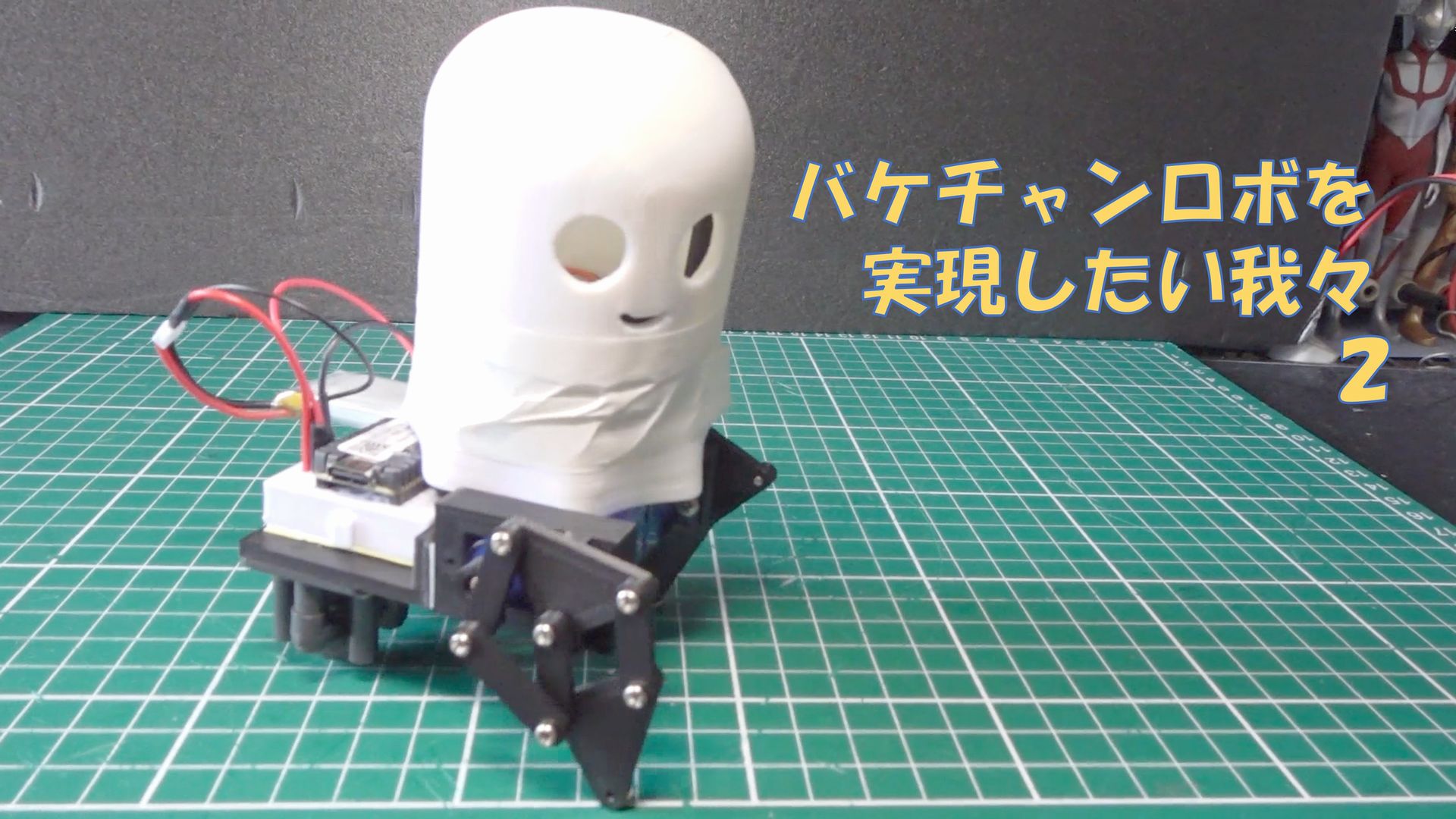
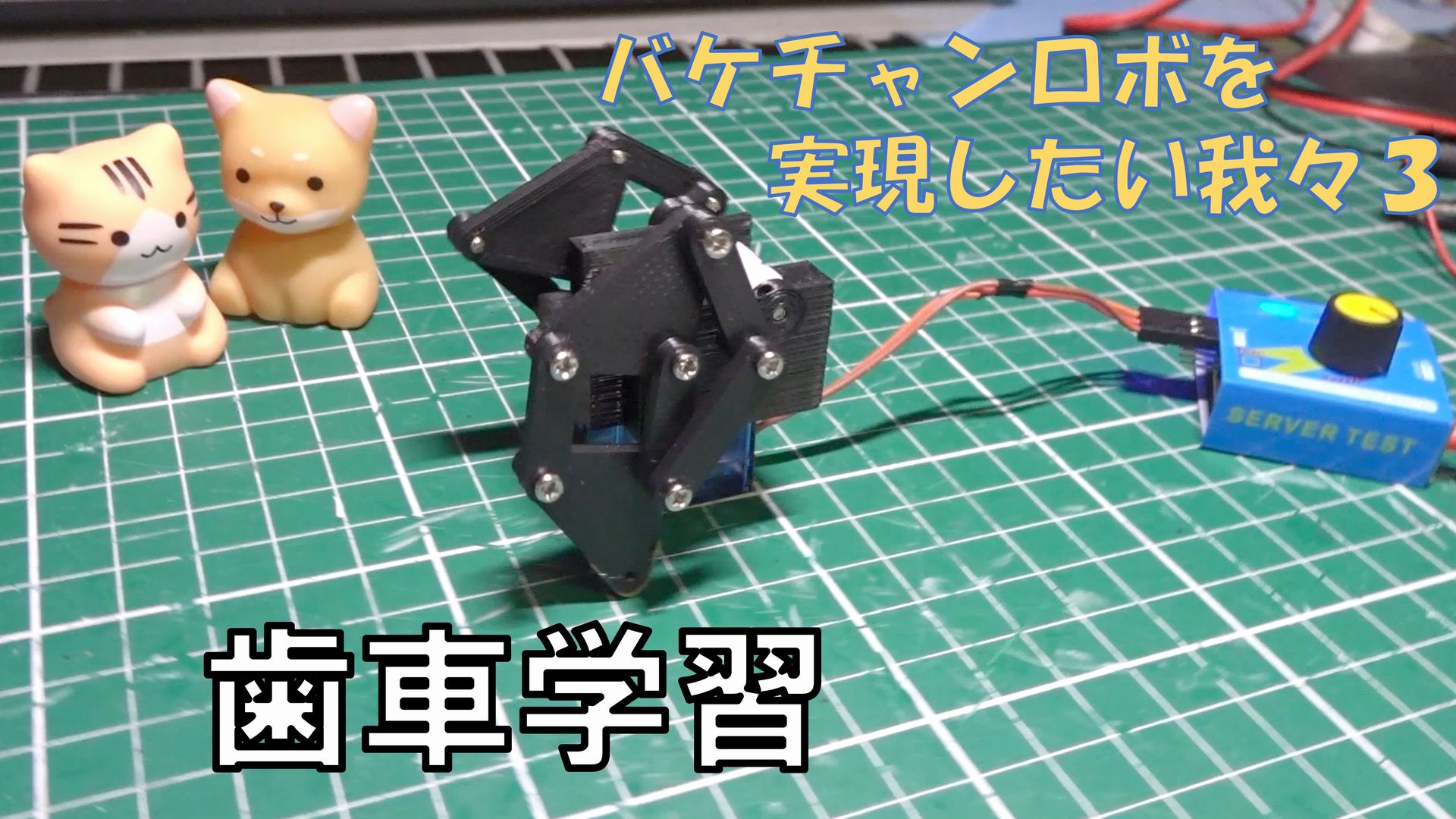
前回は歯車の学習をしクラウンギアによる回転軸直行変換を用いてバケチャンロボの足を製作しました。
ここでは、前回製作した足を受けてボディの検討を実施しました。
目次
ボディ直径検討
前回製作した足が収まるようにボディの直径サイズを検討します。
— HomeMadeGarbage (@H0meMadeGarbage) May 14, 2023
想定より3割ほど大きくなりました。。
#バケチャンロボ pic.twitter.com/YR3TiwXBjd
— HomeMadeGarbage (@H0meMadeGarbage) May 15, 2023
#バケチャンロボ pic.twitter.com/2M2X6KmRKd
— HomeMadeGarbage (@H0meMadeGarbage) May 15, 2023
しかしうまく足を収納できそうで安心しました。
電子ペーパー固定
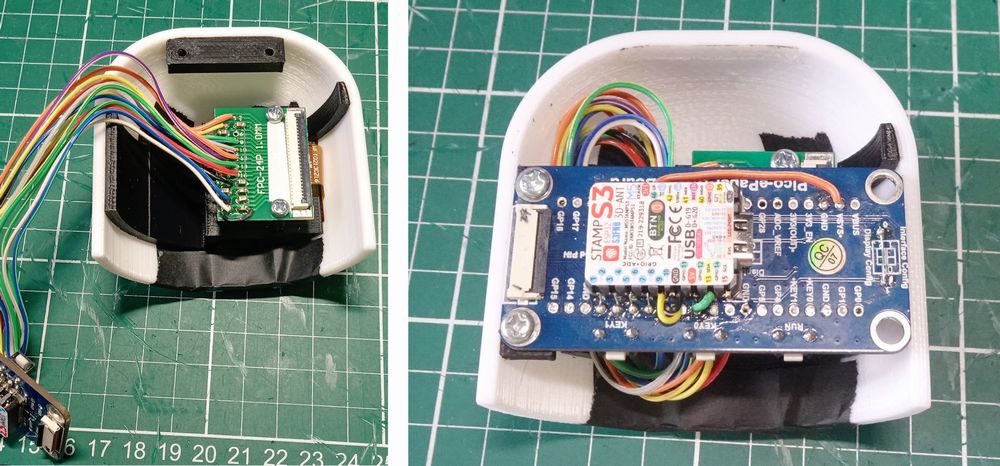
ボディの直径が変わりましたので改めて目の表示用の電子ペーパーの固定方法を検討しました。

内部に固定治具を設けて、ディスプレイと制御基板を収納します。
ボディ高さ検討
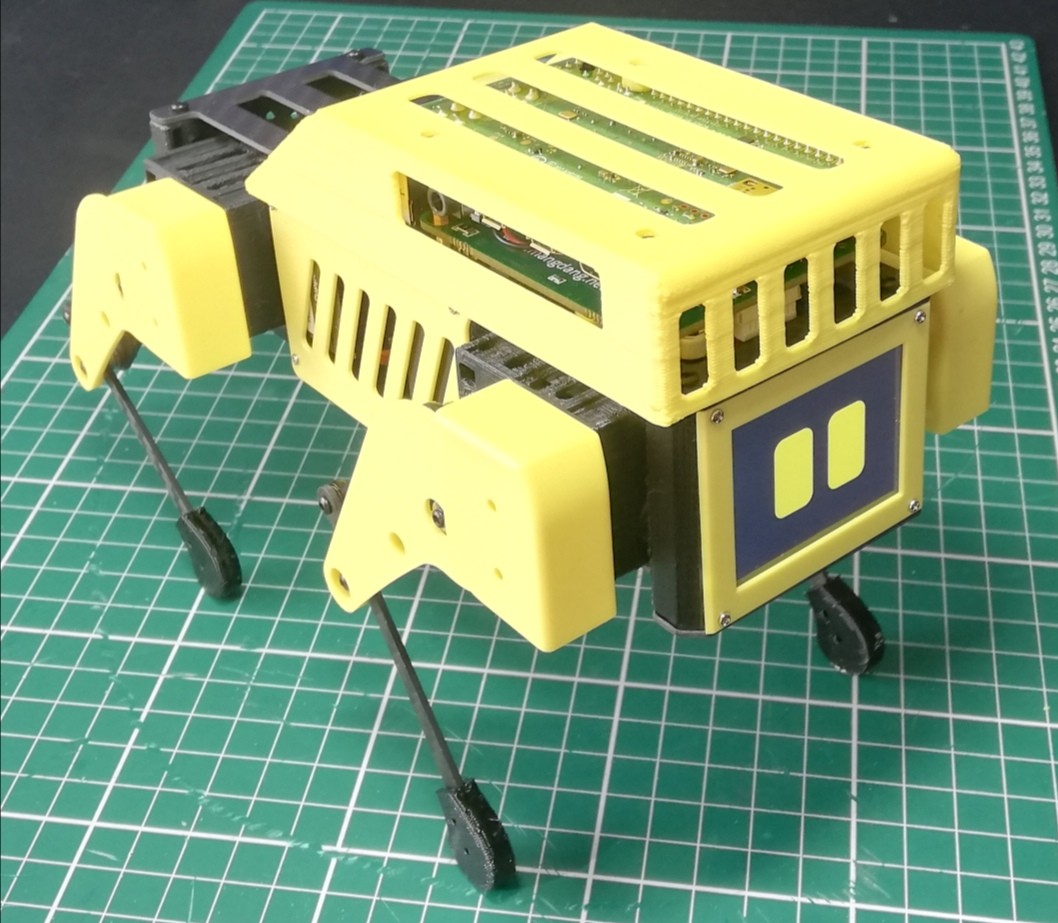
ディスプレイと足の機構を納めるためにボディの高さの検討を実施。
裾部と頭部の間に20mm高さの筒を挿入することで収まりました。
だいたいこんな感じか#バケチャンロボ pic.twitter.com/viUpGTaxEv
— HomeMadeGarbage (@H0meMadeGarbage) May 28, 2023
結構なサイズ感になったww 可愛いけど

おわりに
ここではバケチャンロボのボディについて検討を進めました。
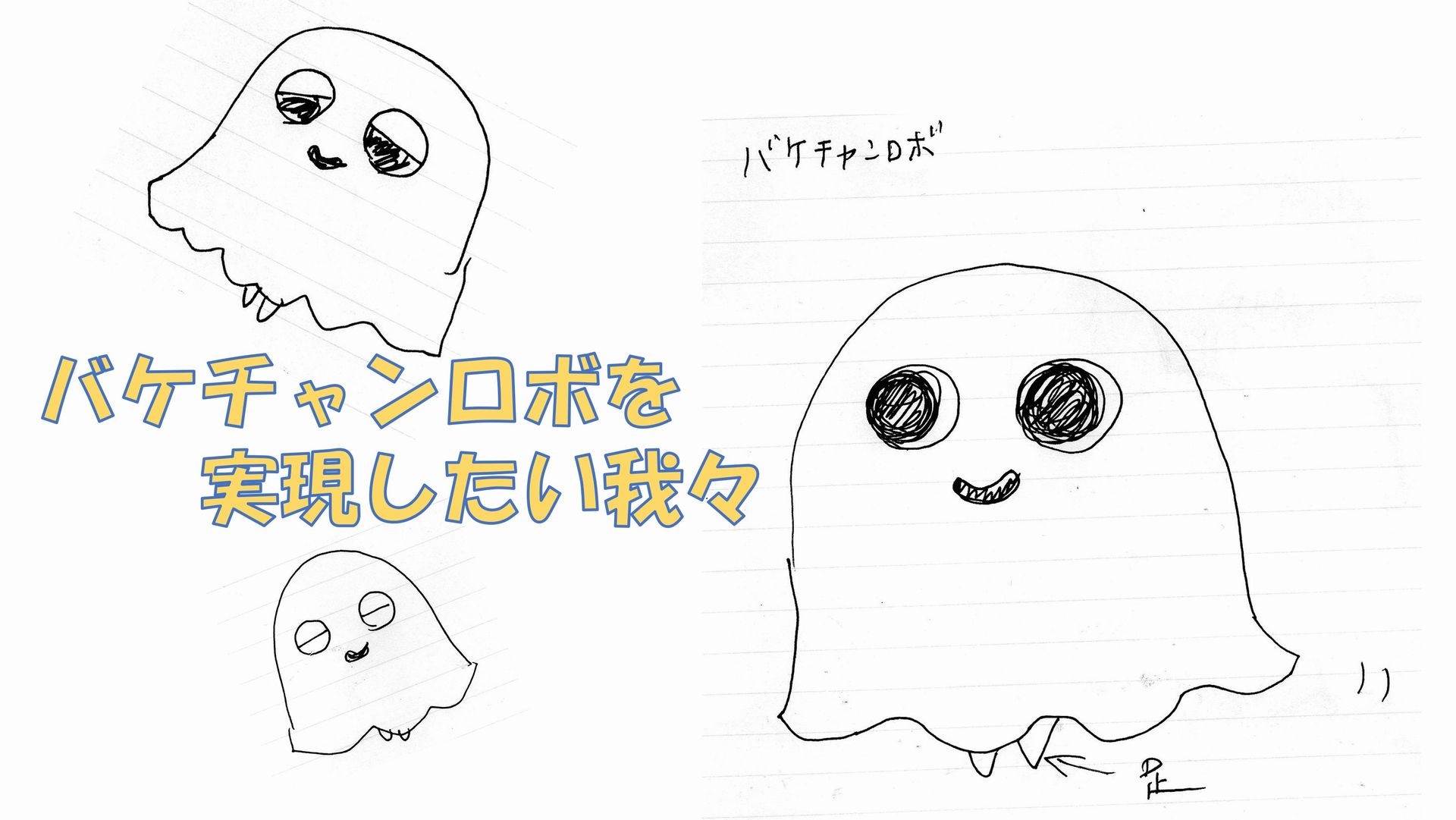
無事にサイズも決まり完成に向けて進めるのみとなりましたが、デザイン先行でのモノづくりの難しさを痛感しました。
本業仕事でも上流から携わることが多く割と自由度高く設計・製作してきたので、本プロジェクトは大変 勉強になっています (ただの趣味の製作なんだけどね)。
バケチャンロボのハード完成に向けて邁進する所存です。