バケチャンロボを実現したい我々5 ーボディ完成ー
本記事にはアフィリエイト広告が含まれます。
前回はバケチャンロボのボディについて検討し目の電子ペーパーや足の機構を納めてサイズを決定しました。
ここではボディの完成を目指し、バケチャンロボのハードメイン部を決定づけたいと思います。
目次
ボディデザイン決定
前回、ボディのサイズを決定しましたのでここでは外観を整えます。
下部のヒラヒラを自然な広がりにしてみました。

組立て
ボディの組み立てはプラモデルのようにモナカをスナップフィットするような形式を採用しました。
穴にアルミ線を立てて結合させます。
スナップフィット#バケチャンロボ pic.twitter.com/GkLe3alv0Y
— HomeMadeGarbage (@H0meMadeGarbage) May 30, 2023
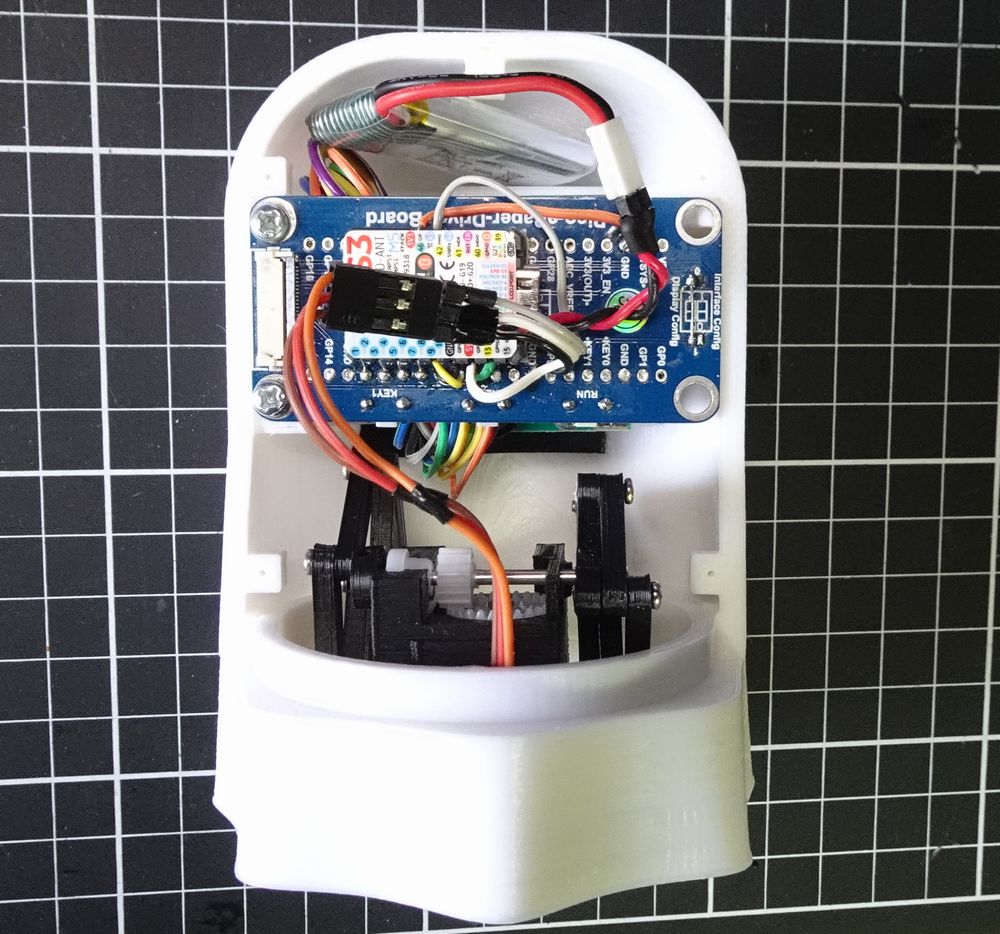
目のモーション
目の電子ペーパーディスプレイをボディに固定して、動きを調整
めんめ#バケチャンロボ pic.twitter.com/pDYjBmqcIW
— HomeMadeGarbage (@H0meMadeGarbage) June 1, 2023
目のモーションをモショモショと#バケチャンロボ pic.twitter.com/ucZPtD9YJP
— HomeMadeGarbage (@H0meMadeGarbage) June 1, 2023
電子ペーパーディスプレイを検討時に色々イジってしまい、若干ディスプレイに欠損が。。
新しいのを買ったので到着を待ちます。
歩行動作
足の機構や電池もボディに仕込んで歩行動作確認
おわりに
ついにバケチャンロボのハードがおおむね完成しました!
いやー時間かかった。。。メチャクチャ試行錯誤したもん
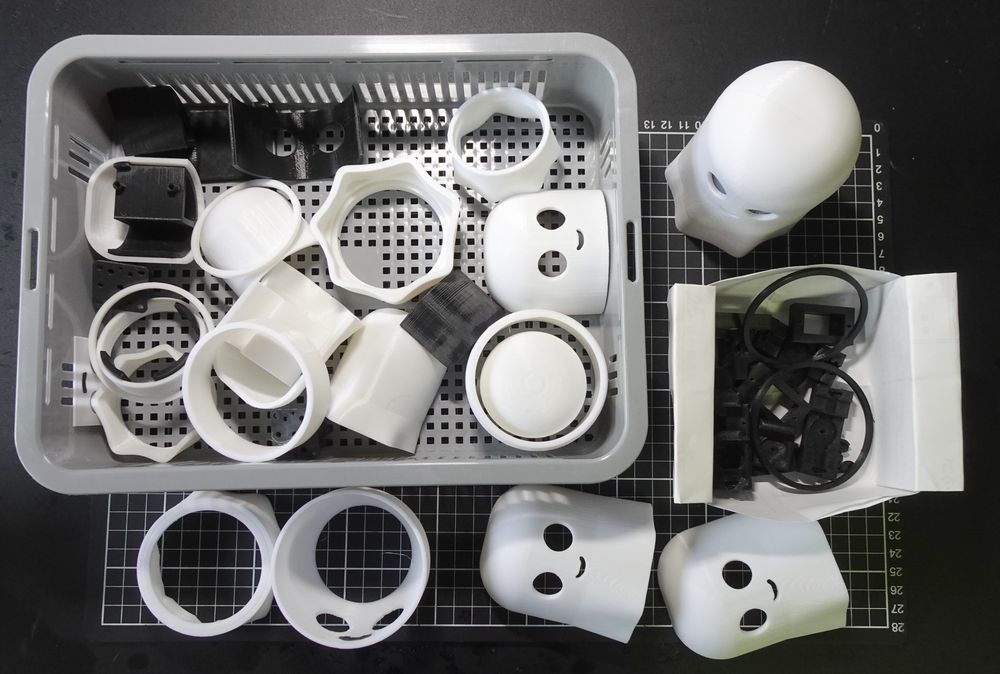
山ほど3Dプリントしたし、デザインもドンドン変化した。

次は発話や会話を目指します。その辺はお母ちゃんが調べてくれてますので 順次進めていきますね。