GW最終日 倒立振子を作ってみた
本記事にはアフィリエイト広告が含まれます。
信じられないがゴールデンウイーク 魅惑の9連休が終わろうとしている。。。
嘘だろオイ。。
よし悪あがきだ
一日でできる簡単フィニッシュエレクトロニクスでもキメるか https://t.co/2GJ7I643Vr— HomeMadeGarbage (@H0meMadeGarbage) May 6, 2023
悲しみを忘れるべく最後の悪あがきとして倒立振子を作ることにしました。
先日はシリアルサーボで倒立振子を製作しました。
シリアルサーボでは回転速度が足りないと感じていたので、ブラシレスモータを用いてガチ倒立振子を目指します。
目次
筐体設計
姿勢制御モジュールでも使用してなじみ深いブラシレスモータを使用することとして、まずはFusion360で筐体を設計しました。
Fusion360で設計 pic.twitter.com/GbdYYSuuFM
— HomeMadeGarbage (@H0meMadeGarbage) May 7, 2023
コチラを3Dプリントします。
コントローラ作製
コントローラはSHISEIGYO-2 Walkerに使用していた基板を使用します。
3Dプリント中に電気周りイジる
今回はSHISEIGYO-2 Walkerの基板を使用 pic.twitter.com/mcUnjcPDIY— HomeMadeGarbage (@H0meMadeGarbage) May 7, 2023
筐体3Dプリント中にプログラミングしました。実に有意義なGW最終日です。
コードは恐らく おおむねOK
あとは3Dプリントを待ちましょう pic.twitter.com/3vdVtIgDL6— HomeMadeGarbage (@H0meMadeGarbage) May 7, 2023
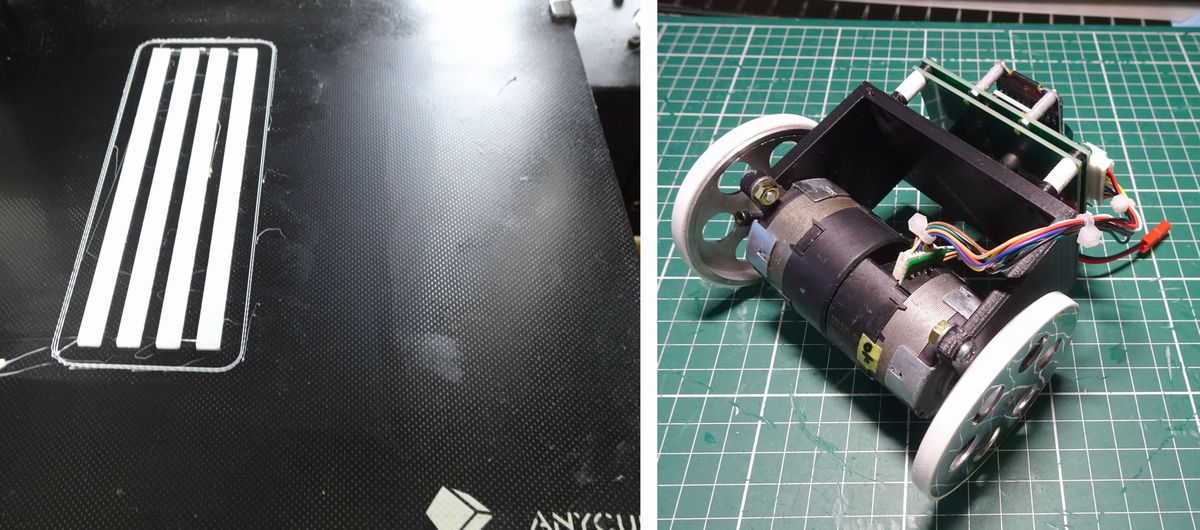
機体組立て
筐体の3Dプリントが終了しました。少し昼寝をさせていただきました。
やっと出来た(4時間)
よく寝た pic.twitter.com/yOIDT1CzR8— HomeMadeGarbage (@H0meMadeGarbage) May 7, 2023
ブラシレスモータとコントローラを搭載して動作味見。
よし!
やっとスタートラインに立った
俺はGWをあきらめない pic.twitter.com/rc3yTSKK23— HomeMadeGarbage (@H0meMadeGarbage) May 7, 2023

姿勢制御モジュール SHISEIGYOシリーズと同様に機体の角度と角速度とホイール回転速度をフィードバックして倒立制御しています。
あっさり立った。これまでの倒立振子学習の賜物でしょう。
仕上げ
アルミのホイールが滑るのでTPUフィラメント製の滑り止めを貼り付けました。
バッテリも搭載。
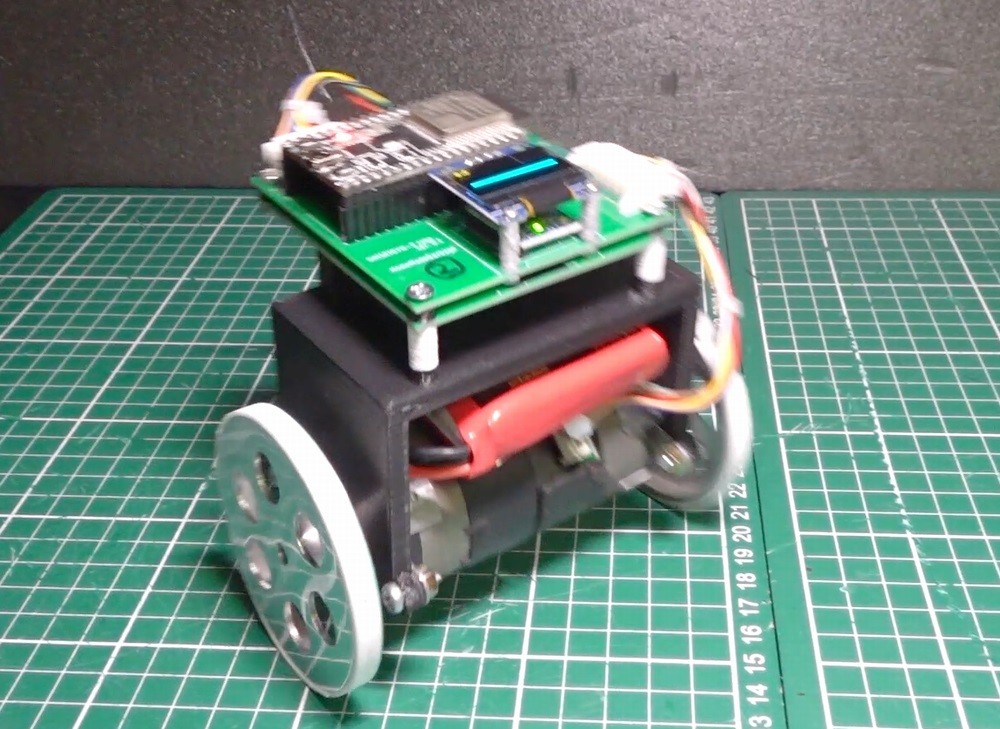
電源系はこんな感じ↓

動作
安定性もよく縦横無尽に移動できた!
おわりに
涙のGW最終日 見事に倒立振子を作り切りました。
エンコーダ付きのブラシレスモータを使用しているため、回転速度もフィードバックして安定性抜群です。
今後の倒立振子学習はこのマシンを使用してみようと思います。
さようなら俺のGW
ブラシレスモータ倒立振子
かわいい pic.twitter.com/WbumSgKS1T— HomeMadeGarbage (@H0meMadeGarbage) May 8, 2023